
Fターム[3C007AS09]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 微小体操作(例;細胞処理) (73)
Fターム[3C007AS09]に分類される特許
1 - 20 / 73
マイクロピンセット、その製造方法及びその操作方法
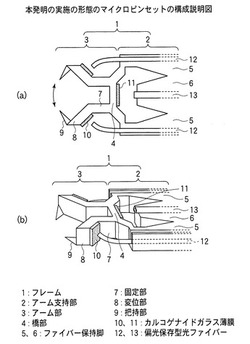
【課題】マイクロピンセット、その製造方法及びその操作方法に関し、操作性及び簡易性を向上する。
【解決手段】アーム支持部2と前記アーム支持部に設けられ先端部を把持部9とする一対のアーム部3とからなるフレーム1と、前記一対のアームに設けられたAs−S、As−Se或いはAs−S−Seのいずれかのカルコゲナイドガラス薄膜10,11からなる駆動素子と、前記カルコゲナイドガラス薄膜に偏光保持型光ファイバ12,13を経由してレーザ光を照射するレーザ光照射手段とを備える。
(もっと読む)
カラーフィルタ基板修正装置

【課題】カラーフィルタ基板にダメージを与えることなく、更に、アーム同士の干渉によるアームの破損を防いで異物欠陥を除去することを可能とするカラーフィルタ基板修正装置を提供する。
【解決手段】異物検査装置によって検出された異物の所在情報に基づいてカラーフィルタ基板に付着した異物を除去するカラーフィルタ基板修正装置であって、カラーフィルタ基板を載置するステージと、異物を撮像する撮像カメラと複数のマイクロマニピュレータとマイクロマニピュレータに備えられその先端で異物を除去する複数のアームとを備えた異物除去ヘッドと、前記異物除去ヘッドを移動する移動手段と、複数のアームを移動する移動手段と、複数のアームとカラーフィルタ基板の接触を防ぐ干渉防止手段その1と、複数のアーム同士の接触を防ぐ干渉防止手段その2と、を有することを特徴とするカラーフィルタ基板修正装置。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】把持装置100は、把持部110と、本体部120と、モータ部130とを備え、取り付けプレート121によってXYZステージ等に取り付けられる。把持部110は、把持対象物を把持(狭持)するための一対のフィンガー部を備え、本体部120の内部に収容された機構及びモータ部130の内部に収容されたモータによって駆動されて、その先端が開閉することで、把持対象物を把持(狭持)する。また、把持装置100では、XYZステージ等を制御して、作業用ベース上に載置された把持対象物に対して、把持装置100全体を下降させている際に、なんらかの理由で、把持部110の先端等が、把持対象物等に接触してしまった場合、把持部110が、本体部120に対して上方に移動することができるように構成されており、それによって、把持対象物等が破損等するのを防止することができる。
(もっと読む)
ボケの抽出方法、位置決め方法及びマイクロマニピュレーションシステム
【課題】形状に制約のないエンドエフェクタを移動することで、花粉に対してエンドエフェクタEを正確に位置決めできる位置決め方法を提供することを目的とする。
【解決手段】花粉Pと、花粉Pに対して奥行き方向に移動可能なエンドエフェクタEとを含む元画像を撮影する手順(a)と、異なる二つの閾値を元画像に適用して得られる二つの二値化画像に基づき差分画像を作成する手順(b)と、差分画像における、花粉Pについての差分の領域の厚さをTp1、エンドエフェクタEについての差分の領域の厚さをTe1とすると、厚さTp1と厚さTe1の比率であるRtと、エンドエフェクタEの奥行き方向の移動距離Dzとの関係を示す下記近似式に基づいてエンドエフェクタEを第1の被処理体に向けて移動させる手順(e)と、を備える位置決め方法。
近似式:Dz=aRtb+c
(もっと読む)
微小マニピュレータ装置
【課題】FIB装置に組み込んだ微小マニピュレータ部をその場でエッチング加工することで、従来困難であった1μm以下の微小物のハンドリングの確実性を高めるとともに、マニピュレータの再利用により作業効率やメンテナンス性を向上する。
【解決手段】微小マニピュレータ部を位置および向きを変えることのできる移動機構で保持することにより、マニピュレーション作業前にマニピュレータ先端部をFIB加工するとともに、作業中のマニピュレータ先端の汚染や破損があった場合でも、加工により再度使用可能な形状に再生する。
(もっと読む)
グリッパシステム及びグリッパ、並びにマニピュレーションシステム
【課題】把持できる対象物の大きさの制限を緩和すること。
【解決手段】グリッパ1は、対象物を把持する把持手段2と、モータ4を用いて把持手段2を動作させる第1の駆動手段と、圧電素子入りサポートユニット3を用いて把持手段2を動作させる第2の駆動手段と、把持手段2が対象物を把持する際の把持力を検出する荷重センサ40及びひずみゲージ42を含む。把持手段2は、第1の把持部材2Aと、第1の把持部材2Aに対向して配置される第2の把持部材2Bとで構成されて、第1の把持部材2Aと第2の把持部材2Bとで対象物を挟持する。そして、モータ4を用いた第1の駆動手段が第2の把持部材2Bを動作させ、圧電素子入りサポートユニット3を用いた第2の駆動手段が第1の把持部材2Aを動作させる。
(もっと読む)
グリッパ及びマニピュレーションシステム
【課題】取り扱う対象物の変形を抑制すること。
【解決手段】グリッパ1は、基部6と、基部6に取り付けられる温度調整手段2と、温度調整手段2に取り付けられる対象物保持部4と、対象物保持部4に設けられる温度応答性ポリマー5と、温度応答性ポリマー5の温度を検出する温度検出手段3とを含む。温度応答性ポリマーは、温度に応答して構造を変化させる高分子材料であり、ポリ(N−イソプロピルアクリルアミド)が用いられる。温度調整手段2は、温度応答性ポリマー5の温度を変化させることにより、グリッパ1が保持する対象物を対象物保持部4に保持し、又は前記対象物を対象物保持部4から解放する。
(もっと読む)
顕微鏡用観察装置
【課題】試料とマニピュレータとの相対的な位置を変えることなく、試料が載置されている試料台を容易に移動することが可能な顕微鏡用観察装置を提供すること。
【解決手段】顕微鏡用観察装置10は、少なくとも一つの可動軸を有する基台20と、基台20上に配置され、かつ基台20の有する可動軸と異なる少なくとも一つの可動軸を有する試料台30とを有する。試料を操作するためのマイクロマニピュレータ50を、連結部材40を介して基台20に取り付けて、基台20の可動軸による動作をマイクロマニピュレータ50の動作と連動させるとともに、試料台30の可動軸による動作をマイクロマニピュレータ50の動作と連動させないようにした。
(もっと読む)
コンタクトレンズの移送用プローブ及び移送方法
【課題】レンズの自動生産工程において有効なレンズの移送手段を開発することを課題とするものであり、水和状態のレンズを移送するに際してこれに損傷を与えないこと、目的とする位置へ確実に移送することができるとともに、迅速な脱離を行うことのできる移送用プローブを提供すること。並びに前記移送用プローブを用いてレンズを移送する方法を提案すること。
【解決手段】レンズを第一の位置から第二の位置へ移送するプローブであって、プローブの先端がレンズの形状に対応した径と形状を有し、前記先端には負圧によりレンズを吸引する孔を備えるとともに、レンズの脱離時にプローブ先端が分割されて該プローブの一部が前進または後退することによって、レンズとプローブとの接触面積が移送時の80%以下になることを特徴とするレンズ移送用プローブ。
(もっと読む)
微小マニピュレータ、及びそれを備えた観察装置
【課題】微小マニピュレータ自体の振動を軽減することで、微小な試料を確実に操作できる微小マニピュレータ、及びそれを備えた観察装置を提供する。
【解決手段】試料300(400)を把持するための対向する一対のアーム71と、アームを支持するベース部11と、ベース部に取り付けられてアームを開閉させる開閉アクチュエータ35とを有するマニピュレータ部100aと、マニピュレータ部の変位を検出する変位検出部110a1、110a2と、ベース部と外部装置200との間に取り付けられ、マニピュレータ部を試料に対して3次元移動させる移動機構120と、変位検出部によって検出された変位を打ち消すように、移動機構を制御する制御部130とを備えた微小マニピュレータである。
(もっと読む)
マニピュレータシステム及び微小操作対象物の操作方法
【課題】微小な操作対象物の交換作業を自動的に可能なマニピュレータシステム及び微小操作対象物の操作方法を提供する。
【解決手段】キャピラリ25,35を駆動対象として、外周側にねじ部を有するねじ軸と、回転軸を回転駆動するモータと、回転軸に固定されて、ねじ軸をその軸方向への移動を自在に支持するねじ要素と、圧電素子への印加電圧に応じて回転軸を微動駆動させる微動機構と、微動機構を伴って三次元空間を移動してキャピラリの位置を制御する三次元軸移動テーブルと、を有する一対のマニピュレータ14,16と、マニピュレータに操作される微小な操作対象物を観察する顕微鏡手段12と、マニピュレータの駆動を制御する制御手段43と、マニュピレータを駆動する操作手段47と、を備え、操作対象物を操作する際に、マニピュレータをシーケンス駆動することで、操作後の操作対象物と操作前の操作対象物との交換を自動化した。
(もっと読む)
マニピュレータ及びマニピュレータシステム
【課題】キャピラリを所定位置にセッティングするときに操作者による誤動作を防止可能なマニピュレータを提供する。
【解決手段】このマニピュレータは、微小対象物を操作するためのキャピラリを圧電素子92により微動駆動する微動機構と、キャピラリを3軸方向に駆動する駆動手段と、圧電素子が発生する電圧を検知する電圧検知手段97と、電圧検知手段による電圧検知に基づいてキャピラリの他部分への接触状態を監視する監視手段45,98と、を備える。
(もっと読む)
アクチュエータおよびマニピュレータ
【課題】煩雑な作業を行うことなく、ピペットを正確に直線運動させること。
【解決手段】ピペット素子34を駆動対象とするねじ軸52と、ねじ軸52とボールねじナット60を介して連結された回転軸54を回転駆動する中空モータ70と、圧電素子92への印加電圧に応じて回転軸54をその軸方向に沿って微動駆動させる微動機構44を備え、中空モータ70の駆動に伴う回転軸54の回転運動をボールねじナット60を介して直線運動に変換してねじ軸52に伝達する。中空モータ70の粗動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って粗動駆動し、微動機構44の微動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って微動駆動させる。
(もっと読む)
マニピュレータ
【課題】軸に直交する方向の微小な並進変位と軸まわりの回転変位を与えるコンパクトで単純な機構のマニピュレータを提供する。
【解決手段】作業を行うアーム部2と、アーム部2の回転角を制御する回転角制御部3と、アーム部2の変位を制御する変位制御部4と、を備えたマニピュレータ1において、回転角制御部3は、回転駆動力を付与する回転角付与手段31を有し、アーム部2は、回転角付与手段31に接続され、回転可能であると共に、屈曲可能な屈曲軸部21と、屈曲軸部21に接続され、屈曲軸部21が屈曲することにより移動する作用軸22と、作用軸22の先端に設置され、各種作業を行う作業部23と、を有し、変位制御部4は、作用軸22に力を付与する変位付与手段41と、変位付与手段41の駆動力を伝達し、作用軸22に常に当接する出力部材42と、を有することを特徴する。
(もっと読む)
マニピュレータ制御装置及びマニピュレータ制御方法
【課題】作業者が注目している作業映像から目を離す必要がなく、また操作中のデバイスから手を離したり、別の手で補ったりすることなく、XYZの運動指令と同一の入力デバイスで、並進3自由度の他に、マニピュレータ先端の回転等を操作するマニピュレータ制御装置及びマニピュレータ制御方法を提供する。
【解決手段】駆動部5aと、駆動部5aにより回転可能な回転軸部5bと、回転軸部5bの先端に設けられ、各種作業を行う作業部51とを有するマニピュレータ5と、作業部51の直交する3方向の並進運動及び回転軸部5bの回転運動を指示する入力デバイス2と、入力デバイス2の指示した動作をマニピュレータ5に伝える制御部3と、を備え、入力デバイス2は、本体20と、本体20に対して回転及び傾倒可能な回転操作子23を有し、本体20は、平面内の移動に応じて、作業部51の直交する2方向の移動量を指示し、回転操作子23は、傾倒に応じて、回転軸部5bの回転を指示することを特徴とする。
(もっと読む)
マニピュレータ、マニピュレータの駆動方法、マニピュレータシステム及び微小操作対象物の操作方法
【課題】容易な位置決めとインジェクションとを同時に満たすことができるマニピュレータを提供する。
【解決手段】このマニピュレータ1は、操作試料に対してインジェクションを行なうものであって、XYZ軸方向に駆動可能であり、少なくともインジェクションを行なう軸方向の圧電素子6を駆動源とするナノポジショナ7と、圧電素子に対して信号を印加することにより圧電素子を微動動作させる制御部10aと、を有する。
(もっと読む)
グローブボックス
【課題】アンプル、アンプル収納具を凍結保存容器から入出庫する際に、これらや凍結保存容器に霜が付着することを抑制することができるグローブボックスを提供する。
【解決手段】収納部1aと入出庫作業空間部1bとから構成されるグローブボックス1であり、収納部1aには凍結保存容器2が内蔵され、入出庫作業空間部1bは外部から透視可能となっている。さらに、作業空間部1bは乾燥ガスで充満され陽圧とされ、作業空間部1bの内部では、収納部1aに収容された凍結保存容器2のアンプル収納具の入出庫作業が行われる。アンプルの入出庫作業を半自動化するロボットを入出庫作業空間部1bに配設することもできる。
(もっと読む)
グリッパー及びその駆動方法
【課題】高電圧や熱を対象物に加える恐れがなく、様々な微細物体がグリップ可能なグリッパー及びその駆動方法を提供する。
【解決手段】圧電駆動部250が伸縮すると、それに伴い接点部230,240が移動する。接点部が移動するとベンディング構造物210,220を介してリンク131,132がアーム111,112とニッパ151,152を押し引きする。それによってニッパ151,152の先端が開閉し、微細物体をグリップする。
(もっと読む)
マイクロマニピュレーションユニットおよびマイクロマニピュレーションシステム
【課題】非接触型マニピュレーションを行うのに好適なマイクロマニピュレーションユニットおよびマイクロマニピュレーションシステムを提供する。
【解決手段】マイクロマニピュレーションユニット10は、液浴12の底面12aに多数のピエゾ素子エレメント14が液浴12の底面12aと底面上方との間を伸縮方向にして整列配置される。マニピュレーション対象物としての粒子16を含む液体18を液浴12に注入し、特定のピエゾ素子エレメント14に電圧を印加し、振動させる。これにより、振動する特定のピエゾ素子エレメント14の上面あるいはその近傍に液体が移動することで液体に同伴する粒子16が集合する。振動するピエゾ素子エレメント14を順次移動させることで、集合した粒子16を移動させることができ、所定の位置に移動させた粒子16に対して、適宜の他のマイクロマニピュレーションを好適に施すことができる。
(もっと読む)
試料作成装置および試料姿勢転換方法
【課題】 簡便に試料小片の姿勢を90度、180度、あるいは任意の角度だけ回転させて試料台に固定可能な装置を提供すること。
【解決手段】 試料7の表面とマニピュレータ回転軸2の交点を一端とする試料表面に垂直な線分をマニピュレータ回転軸2の周りに回転して得られる円錐側面と、試料表面の2つの面によってつくられる交線11に、試料小片の特定の方向を一致させた後、試料小片をマニピュレータで支持し、マニピュレータ回転軸2を動作させることを特徴とする試料作成装置。
(もっと読む)
1 - 20 / 73
[ Back to top ]