
Fターム[3C007AS11]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 溶接、溶断 (253)
Fターム[3C007AS11]に分類される特許
1 - 20 / 253
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
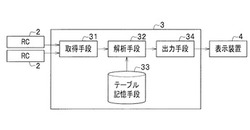
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
ケーブル支持装置

【課題】ケーブルのたるみを大きくすることなく且つ保持部のストロークを長大化することなく、ロボット手首の自由度に十分に追従させることができるケーブル支持装置を提供する。
【解決手段】ケーブル11を保持する保持部52と、第2アーム24の長手方向に沿って移動自在な直動スライダ70を有する直動機構54と、第2アーム24の周方向に沿って回転自在な回動スライダ92、93を有する回動機構56とを備える。直動機構54及び回動機構56により、保持部52が第2アーム24の長手方向及び周方向に変位自在となっている。
(もっと読む)
産業用ロボット
【課題】産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1が、アーム2と、アームを支えることが可能な柱部材3と、柱部材の土台4とを備える産業用ロボットであって、アームは、柱部材に対して、アーム先端部22からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラ6を備えていることからなる。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置
【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
ロボットの制御方法およびロボット制御装置
【課題】ユーザ座標系がポジショナに搭載又はマニピュレータに把持されたワークの形状に合わせて設定されている場合、ワークの位置姿勢が変わるとユーザ座標系の再設定が必要になる。
【解決手段】ワークWの形状に応じた軸方向を有するユーザ座標系Cuの設定する際に、特徴点E1〜E3の位置教示に加えて、特徴点の位置座標値を記憶する座標系を、少なくともワーク座標系を含む複数の座標系の中から選択する。特に、ユーザ座標系Cuを、ポジショナP(またはマニピュレータMとは別のマニピュレータ)に搭載されたワークWの形状に応じて設定するときは、特徴点の位置座標値をワーク座標値で記憶する。このことによって、(b)のように、ポジショナPが回転してワークWの位置姿勢が変化したとしても、ユーザ座標系Cuが追従する。すなわち、ユーザ座標系を再設定することなく、そのまま利用することができる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
アーク溶接ロボットにおいてトーチ姿勢の教示が煩雑である。
【解決手段】
ロボット制御装置RCは、トーチTの姿勢を規定するトーチ姿勢ファイルを作成するCPUと記憶部を備える。トーチ姿勢ファイルは、溶接線上の教示点または溶接開始命令の1パラメータとして設定される。ロボット制御装置RCは、作業プログラムを再生する際、トーチ姿勢ファイルが設定された教示点、またはトーチ姿勢ファイルが設定された溶接開始命令が有効となる教示点におけるトーチ姿勢を算出する。角度パラメータを、作業プログラムとは別のファイルとすることで、一度教示したトーチ姿勢の再利用を可能とすると共に修正も容易となる。
(もっと読む)
ロボットの手首構造及びロボット
【課題】周辺機器との干渉を低減することが可能なロボットの手首構造及びロボットを提供する。
【解決手段】ロボット10の手首部20は、第1の軸回りに回転する第1の手首アーム40aと、第1の手首アーム40aの先端部に設けられ、第1の軸に実質的に交差する第2の軸回りに揺動する第2の手首アーム40bと、第2の手首アーム40bの先端部に設けられ、第2の軸とねじれの位置にある第3の軸回りに回転する手首フランジ42と、手首フランジ42に固定される中間部材44と、中間部材44に固定されるエンドエフェクタ22に接続される線条体25bとを備え、線条体25bが、第2の手首アーム40b、手首フランジ42、及び中間部材44の内部を通り、中間部材44から外部に引き出されてエンドエフェクタ22まで配線される。
(もっと読む)
ティーチングデータ作成方法およびティーチングデータ作成装置
【課題】所定の製造ラインで作業される新たなワークに対し、この製造ラインの特性を考慮したティーチングデータを効率的に作成することを可能にする多関節ロボットのティーチングデータ作成方法およびティーチングデータ作成装置を提供すること。
【解決手段】ワークに設定された複数の作業点のそれぞれでエンドエフェクタにより作業を行う多関節ロボットのティーチングデータ作成方法において、ティーチングデータ供給対象の多関節ロボットが前記作業点のそれぞれに対して作業するときのエンドエフェクタの各姿勢の制御データを取得し(ステップS3)、制御データの中から、ティーチングデータ作成対象のワークに設定された作業点にほぼ一致する作業点を特定し(ステップS7)、当該作業点での前記エンドエフェクタの姿勢の制御データに基づいて前記ティーチングデータを作成する(ステップS9)ことを特徴とする。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
基準面を設定して狙い角等のトーチ姿勢を数値で教示あるいは表示するアーク溶接ロボット制御装置では、溶接線を規定する教示点の位置を修正したときに、基準面を算出するための補助点も修正する必要がある。
【解決手段】
ロボット制御装置RCは、溶接線を規定する各教示点と、基準面を算出するための補助点とを、対にして記憶する記憶部を備える。ロボット制御装置RCは、溶接線上の教示点の位置変更があったとき、位置変更があった教示点と対の関係にある補助点を、前記位置変更があった教示点の修正分を補正して自動算出するCPUを備える。本来の溶接線の教示修正結果に応じて基準面を算出するための補助点も自動修正されるので、教示修正時間を大幅に短縮できる。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ロボット
【課題】線条体の寿命を延ばすことが可能なロボットを提供する。
【解決手段】ベース12と、ベース12に旋回可能に設けられた旋回部13と、旋回部13に基端部が回転可能に支持され、前後方向に揺動する下部アーム15と、下部アーム15の長手方向に沿って、下部アーム15の側面に並んでそれぞれ配線された第1及び第2の線条体31、32を下部アーム15の長手方向に移動可能に支持する案内部41、案内部41の下部アーム15の長手方向の両側にそれぞれ設けられ、第1及び第2の線条体31、32が移動することより生じる第1及び第2の線条体31、32のロボット10の幅方向の変形を抑制する2つの押さえ部材42a、42b及び下部アーム15の基端部側の側面及び先端部側の側面をそれぞれ覆い、第1及び第2の線条体31、32を保護する2つの保護部材44a、44bを有する線条体支持機構20とを備える。
(もっと読む)
自動溶接システムにおける溶接方法および自動溶接システム
【課題】レーザセンサを溶接トーチの近傍に取り付けている為に定期的な保守作業が必要になり、生産性を低下させる。
【解決手段】レーザセンサLSで溶接部位Wsを検出して教示データを補正し、溶接トーチTにより加工する自動溶接システム1である。溶接ロボットMPは溶接トーチ又はレーザセンサのどちらかを取り付けるためのツール着脱機構を有する。溶接トーチを待避させるためのツールスタンド11およびレーザセンサを待避させるためのツールスタンド12を備える。まず、溶接トーチをツールスタンド11に待避させ、レーザセンサを取り付ける。次にレーザセンサを取付けた状態のときに作成した教示データを補正する。次にレーザセンサをツールスタンド12に待避させ、溶接トーチを取付ける。補正後の教示データを再生することにより溶接加工を行う。輻射熱やヒュームからレーザセンサを保護することができる。
(もっと読む)
オフラインティーチング方法
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
溶接ロボットのティーチング装置およびティーチング方法
【課題】特殊技能を有したオペレータでなくても、スポット溶接ロボットのティーチングを容易に行うことができ、ティーチングの作業時間を短縮することができるようにする。
【解決手段】ワーク上の溶接打点420との関係で、溶接ガンの溶接チップをどれだけワークから離すかを示す距離情報430、溶接ガンを溶接打点420の位置する側にどれだけ移動させるかを示す第1移動情報440、溶接打点420の位置しない側にどれだけ移動させるかを示す第2移動情報450を含む相対位置情報の入力を受け付け、溶接打点の位置および溶接動作を含む溶接打点情報の入力を溶接打点毎に受け付けて、溶接ガンの空走ポイントを決定し、溶接ガンの姿勢を維持したまま溶接動作を行うための動作プログラムを生成することで、溶接ガンの姿勢を溶接打点毎に設定せず、相対位置情報および溶接打点情報の入力だけで溶接ガンの空走ポイントが自動的に決定されるようにする。
(もっと読む)
ロボットのツールベクトルの導出に用いる治具
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する際に好適な治具を提供する。
【解決手段】本発明に係る治具10は、先端部に平面接触子14が備えられると共に平面接触子14に対し垂直方向を向く計測軸に沿った変位を計測可能で且つ平面接触子14でツール先端の位置ずれ量を計測して実績位置ずれ量とする3つの変位計11と、3つの変位計の各計測軸が1点で互いに直交し且つ各計測軸の交点が空間上の所定点となるように、3つの変位計11を配備する配備手段15と、を有する。
(もっと読む)
溶接用ロボット
【課題】溶接用ロボットの姿勢を変更しても画像センサが邪魔にならないようにする。
【解決手段】溶接用ロボット1において、アーム部15の先端に手首部16を介して溶接ツール17を取り付ける。手首部16に移動手段26を取り付けると共に移動手段26を介して画像センサ25を取り付け、この移動手段26を、画像センサ25を溶接ツール17に対して移動させる構造とする。また、移動手段26を、画像センサ25を手首部16の軸芯に沿って移動させる構造とする。或いは、移動手段26を、画像センサ25を手首部16の軸芯回りに移動させる構造とする。移動手段26を、画像センサ25を手首部16の軸芯に対して垂直方向に移動させる構造とする。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
1 - 20 / 253
[ Back to top ]