
Fターム[3C007BS03]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 3関節直角座標型 (108)
Fターム[3C007BS03]の下位に属するFターム
Fターム[3C007BS03]に分類される特許
1 - 20 / 91
敷ブロックの配置方法、敷ブロック移動用工具、および、その工具を備えた工作機械
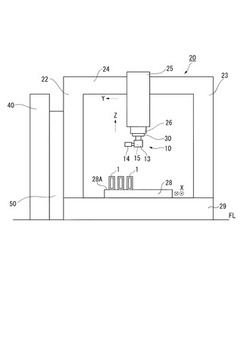
【課題】作業者の安全性確保、機械および敷ブロックの破損防止および設置精度の向上に加え、敷ブロックの姿勢変更も容易に行うことができる敷ブロックの配置方法。
【解決手段】敷ブロック1をスピンドル30が保持可能な範囲内のブロック格納エリア28Aに設置しておくブロック準備工程と、スピンドルに装着される主軸装着部、敷ブロックを保持するブロック保持部14およびブロック保持部を水平な旋回軸を中心に旋回させる旋回機構15を有する敷ブロック移動用工具10をスピンドルに装着する工具装着工程と、相対移動により、敷ブロック移動用工具によって敷ブロックをテーブル28のワーク載置位置に配置するブロック配置工程とを備え、ブロック配置工程は、敷ブロックを保持した状態で、敷ブロックの姿勢を変更する動作を含む。
(もっと読む)
直交型組付装置

【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
ロボット設置構造
【課題】作業者の技量に関係なく、ロボットの設置作業を効率よく実施する。
【解決手段】架台は、平板状をなすステージ12を備えており、そのステージ12の上面側にロボット13が設置されている。ロボット13は、ステージ12上に載置された状態で、ステージ下面側から複数のネジ18により固定される。ステージ12には上下に貫通する貫通孔16が設けられている。ロボット底面部には、基準位置としてのネジ孔17が設けられているとともに、マーキングシート20が貼り付けられている。マーキングシート20には、そのネジ孔17に対する方向情報と同ネジ孔17までの離間距離情報とが付与されたマーキングが付されている。
(もっと読む)
ワークの自動積載方法及びその装置
【課題】サイクルタイムを短縮することができるワークの自動積載方法及びその装置を提供する。
【解決手段】先ず、初期位置からロボットヘッド20を第1プレートW1の上方に移動し、ロボットヘッド20に設けられた第1把持部42、42にて第1プレートW1を把持する。そして、ロボットヘッド20を第2プレートW2の上方に移動し、ロボットヘッド20に設けられた第2把持部54、54にて第2プレートW2を把持する。その後、第1プレートW1及び第2プレートW2を把持した状態でロボットヘッド20をトレー104に形成された凹部106の上方に移動し、第1プレートW1及び第2プレートW2の把持を解放することにより、第1プレートW1及び第2プレートW2を積載する。
(もっと読む)
トレイ移載装置及び方法
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
カラーフィルタ基板修正装置
【課題】カラーフィルタ基板にダメージを与えることなく、更に、アーム同士の干渉によるアームの破損を防いで異物欠陥を除去することを可能とするカラーフィルタ基板修正装置を提供する。
【解決手段】異物検査装置によって検出された異物の所在情報に基づいてカラーフィルタ基板に付着した異物を除去するカラーフィルタ基板修正装置であって、カラーフィルタ基板を載置するステージと、異物を撮像する撮像カメラと複数のマイクロマニピュレータとマイクロマニピュレータに備えられその先端で異物を除去する複数のアームとを備えた異物除去ヘッドと、前記異物除去ヘッドを移動する移動手段と、複数のアームを移動する移動手段と、複数のアームとカラーフィルタ基板の接触を防ぐ干渉防止手段その1と、複数のアーム同士の接触を防ぐ干渉防止手段その2と、を有することを特徴とするカラーフィルタ基板修正装置。
(もっと読む)
パレタイズ装置
【課題】爪を有するハンド部でワークを把持し移動させてパレット上に整列積載するパレタイズ装置において、ワークの整列時にハンド部を引き抜く動作を不要として高速にパレタイズ可能とする。
【解決手段】本装置は、ワークWを把持するハンド部2と、ハンド部2を移動させ、ワークWを順次搬送してパレット7に整列して積載するアーム部3と、を備え、ハンド部2は、ワークWを把持する長爪21および退避爪22と、退避爪22を退避させる退避機構と、を備えている。アーム部3は、爪21,22によってワークWを把持したハンド部2を移動させてワークWをパレット7上に移動させ、ハンド部2がワークWを整列させる方向x1の前方側にある退避爪22を退避機構によって退避させ、前記方向x1の後方側にある長爪21によってワークWを押してワークWを整列させる。整列時に退避爪22が退避するので、ハンド部2を引き抜く必要がない。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】ボディ14の取付ブラケット110は側面に開口するインパネ取付孔111a、111bを備える。インストルメントパネル24は、ボルト150がインパネ取付孔111a、111bを介して挿通される側方固定孔25a、25b及び把持穴26を備える。インストルメントパネルの取付装置10は、インパネ支持アーム72と、インパネ支持アーム72の側面に設けられた基準ターゲット77と、側方から撮像する撮影部100とを有し、画像データ144からインパネ取付孔111a、111b及び基準ターゲット77の位置を、位置データ142における基準位置データと比較し、その比較結果に基づいて、基準ターゲット77が許容ずれ範囲となるようにインパネ支持アーム72を駆動する。
(もっと読む)
樹脂複合材及びこれを用いた梁構造部材
【課題】炭素繊維強化プラスチック(CFRP)を主材とする樹脂複合材に関し、制振性、強度に優れ、毒性や環境への負荷が小さい樹脂複合材を提供する。
【解決手段】炭素繊維強化プラスチック内部に、樹脂フィルムを封じてなる構成を備えた樹脂複合材であって、前記樹脂フィルムが、引っ張り弾性E’が1×107Pa〜5×108Paで、且つ損失正接tanδが5×10−2〜1×100であることを特徴とする樹脂複合材を提案する。
(もっと読む)
ビンピッキングシステム
【課題】ロボットによるビンピッキング作業を良好に行うことができながらも、設備全体の大型化を抑制して小型化の要求に応える。
【解決手段】作業台2上に、直角座標型のロボット3、多数個の部品Wをばら積み状態に収容する部品供給箱4、カメラ6、仮置き領域8、部品載置位置7aを有するコンベア装置7を設ける。ロボット3の手首部16に、水平方向に延びる軸を中心に回動するプレート17を設け、このプレート17に、吸着ノズル19とチャック20とをV字状に開いた形態(角度θが90〜135度)で一体的に有する複合ハンドツール18を取付ける。制御装置21は、部品収容箱4内の部品Wをカメラ6によって認識し、吸着ノズル19により1個ずつピックアップして仮置き領域8に仮姿勢とした上で載置し、チャック20を用いて仮置き領域8の部品Wを最終確定姿勢に変換して部品載置位置7aに載置する。
(もっと読む)
ロボット、搬送装置、及び慣性センサーを用いた制御方法
【課題】慣性センサーの出力の誤差によって制御装置が情報を誤認識することで、正しい制御が損なわれることを抑制することができるロボット、搬送装置、及び慣性センサーを用いた制御方法を提供する。
【解決手段】搬送装置は、移動部と、移動部の駆動源と、駆動源の位置情報を出力する位置センサーと、移動部が移動させられる際の慣性力情報を出力する慣性センサーと、移動部の移動を規定する制御指令を出力する制御指令発生部と、を備える搬送装置であって、移動部の移動動作を制御する際に、慣性力情報を用いるか否かを決定する制御切替決定部と、制御切替決定部が慣性力情報を用いることを決定した場合には、制御指令、位置情報、及び慣性力情報に拠って第一の制御を実施し、制御切替決定部が、慣性力情報を用いないことを決定した場合には、制御指令、及び位置情報に拠って第一の制御とは異なる第二の制御を実施する動作制御部と、を備える。
(もっと読む)
ロボット、搬送装置、及び電力供給方法
【課題】回動又は摺動自在に支持された移動部に取り付けられた慣性センサーに電力を供給するための、回動又は摺動自在に支持する支持部を経由して基体から移動部に達する電力供給用のケーブルや、発電用の動力を伝達する動力伝達機構などを不要にすることができるロボット、搬送装置、及び電力供給方法を提供する。
【解決手段】ロボット20は、一端に作業端末を支持しもう一端を回動自在に支持されたアーム21と、アームを回動させるための駆動源と、アームに取り付けられておりアームが回動する角速度を検出してアームの角速度情報を出力する慣性センサー32と、アームに取り付けられており慣性センサーに電力を供給する発電装置40と、発電装置で発電した電力を蓄える二次電池52と、を備える。発電装置は、アーム21の運動エネルギーによって駆動される発電機、または太陽電池であり、センサの近傍に設ける。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
計測システム
【課題】1台の計測装置で複数の計測対象を計測可能とし、かつ、計測対象の絶対位置を精度良く計測することを可能とする。
【解決手段】 この計測システムは、計測対象38までの距離と方向を計測する計測装置34と、計測装置が取付けられているロボット装置(20,32)と、計測対象の近傍に設置されている絶対位置が既知の参照計測対象36と、計測装置34とロボット装置(20,32)を制御すると共に、計測結果から計測対象38の絶対位置を演算する制御装置12を備えている。制御装置12は、参照計測対象36までの距離と方向を計測するキャリブレーション工程と、計測対象38までの距離と方向を計測する計測工程と、を実施する。
(もっと読む)
成形装置および搬送装置
【課題】多様な形状の成形素材の正確な位置決めおよび搬送時間の短縮を実現する。
【解決手段】光学素子材料20を吸着保持する吸着パッド13と、光学素子材料20を把持して位置決めするチャック3を共通の吸着筒1に共通に固定し、吸着筒上下シリンダ12および吸着筒上下スライドステージ6によって同時に昇降させ、吸着パッド13は吸着パッド上下機構13aによって独立に吸着高さ位置を制御可能にし、光学素子位置決め台8に載置された光学素子材料20の外周部を一対のチャック3の間に把持して位置決めした後、吸着パッド13のみを降下させて光学素子材料20の上面を吸着保持させ、吸着パッド13およびチャック3によって位置決めされて保持された状態の光学素子材料20を、脱落させることなく、高速かつ正確に成形下型11に載置する。
(もっと読む)
段積み部品取出し装置
【課題】段積みされた部品を効率良く取出す装置を提供する。
【解決手段】平面上で位置決めできる本体と、本体に取り付けられたアクチュエータ62と、該アクチュエータ62により駆動されて上昇端位置α1と下降端位置の2ポイントの位置で上下動する上下本体63と、該上下本体63に自重で上下動できるように貫通状態で設置された自重上下軸41と、該自重上下軸41がその下降端位置にあることを検出するセンサPH1とを具備する段積み部品取出し装置において、前記自重上下軸41の上端部には、自重で下降することを停止させる自重軸ストッパ45が設けられ、前記自重上下軸41の下端部には、部品を把持するチャック21と、前記自重上下軸41を部品上面で停止させるためのストッパ51が設けられていることを特徴とする。
(もっと読む)
グリッパシステム及びグリッパ、並びにマニピュレーションシステム
【課題】把持できる対象物の大きさの制限を緩和すること。
【解決手段】グリッパ1は、対象物を把持する把持手段2と、モータ4を用いて把持手段2を動作させる第1の駆動手段と、圧電素子入りサポートユニット3を用いて把持手段2を動作させる第2の駆動手段と、把持手段2が対象物を把持する際の把持力を検出する荷重センサ40及びひずみゲージ42を含む。把持手段2は、第1の把持部材2Aと、第1の把持部材2Aに対向して配置される第2の把持部材2Bとで構成されて、第1の把持部材2Aと第2の把持部材2Bとで対象物を挟持する。そして、モータ4を用いた第1の駆動手段が第2の把持部材2Bを動作させ、圧電素子入りサポートユニット3を用いた第2の駆動手段が第1の把持部材2Aを動作させる。
(もっと読む)
グリッパ及びマニピュレーションシステム
【課題】取り扱う対象物の変形を抑制すること。
【解決手段】グリッパ1は、基部6と、基部6に取り付けられる温度調整手段2と、温度調整手段2に取り付けられる対象物保持部4と、対象物保持部4に設けられる温度応答性ポリマー5と、温度応答性ポリマー5の温度を検出する温度検出手段3とを含む。温度応答性ポリマーは、温度に応答して構造を変化させる高分子材料であり、ポリ(N−イソプロピルアクリルアミド)が用いられる。温度調整手段2は、温度応答性ポリマー5の温度を変化させることにより、グリッパ1が保持する対象物を対象物保持部4に保持し、又は前記対象物を対象物保持部4から解放する。
(もっと読む)
作業装置及びその校正方法
【課題】作業装置が有する作業部と距離測定部との校正用パラメータを、非接触かつ自動的に取得する。
【解決手段】作業部を作業位置へ移動させる移動部と、移動部に設置されて作業部とともに移動する距離情報取得部と、移動部とは独立して固定された撮像装置とを有する作業装置は、撮像装置における画像平面上に仮想目標点を設定し、撮像装置によって撮影された画像において作業部の作業基準点と仮想目標点とを一致させるための移動部の座標を複数取得する。また、作業装置は、画像において、距離情報取得部の投光位置と仮想目標点を一致させる移動部の座標と、その座標位置において距離情報取得部から得られる距離情報とを複数取得する。そして、作業装置は、上記処理で取得された複数の座標及び距離情報に基づいて、移動部と距離情報取得部のための校正用パラメータを算出する。
(もっと読む)
1 - 20 / 91
[ Back to top ]