
Fターム[3C007BT01]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426)
Fターム[3C007BT01]の下位に属するFターム
2軸手首 (85)
3軸手首 (135)
つれまわり防止機構を有するもの (8)
ハンドの向きを一定に保つもの (109)
Fターム[3C007BT01]に分類される特許
1 - 20 / 89
ワーク搬送装置
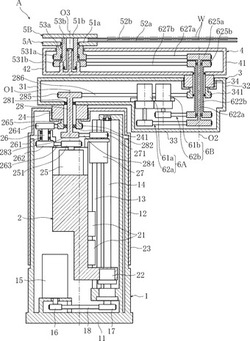
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
直交型組付装置

【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
搬送ロボット
【課題】昇降駆動手段において必要となる昇降駆動力を低減することができる搬送ロボットを提供すること。
【解決手段】本発明の搬送ロボットは、第1軸線周りに回転可能に構成された第1リンク部材と、第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、少なくとも保持部材を昇降駆動するための昇降駆動手段と、を備える。第1リンク部材、第2リンク部材、及び保持部材が、この順番で連結されてアームリンク機構を構成しており、昇降駆動手段が、第1リンク部材と保持部材との間に配置されてアームリンク機構の一部を構成している。
(もっと読む)
屈曲関節機構並びにその屈曲関節機構を有する術具及びその屈曲関節機構を有するマニピュレータ
【課題】本発明は、ワイヤの伸びやたるみ、機構部材の公差によるガタなどによる関節機構のガタを低減すると共に、連続した屈曲関節においても少ない部品点数で屈曲機構を構成することができ、多自由度術具などの処置具の先端部を精密位置決めすることができる屈曲関節機構並びにその屈曲関節機構を有する術具及びその屈曲関節機構を有するマニピュレータを提供することである。
【解決手段】駆動ロッド13を軸方向に直動させる場合には、駆動プレート7に駆動ロッド13からの押圧力が作用し、駆動ロッド13は弾性変形領域内で梁としてたわみながら、駆動プレート7を第1の回転中心O1位置を中心に回転させる。この場合、ダブルジョイント機構では、駆動プレート7が支持部5の回転中心O1を中心に回動し、この駆動プレート7の回動動作に連動して支持部5の先端部の第1ガイドギア部8に対して、作動部6の第2ガイドギア部9が転がり回転しながら動くようにしたものである。
(もっと読む)
把持ハンド、及び搬送装置
【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
産業用ロボット
【課題】搬送対象物が上下方向で重ならないように配置される第2配置位置と産業用ロボットとの間にゲート部が配置されていても、本体部に対するハンドの旋回半径を小さくしつつ、ハンドとゲート部との干渉を防止することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、第1ハンド3および第2ハンド4と、アーム5と、本体部6とを備えている。第1ハンド3の基端部と第2ハンド4の基端部とは、上下方向で重なるようにアーム5の先端部に取り付けられている。第1ハンド3と第2ハンド4とは、アーム5に対して個別に回転可能であり、かつ、上下方向から見たときにアーム5に対して共通の回転中心C1を中心にして回転可能である。また、第1ハンド3と第2ハンド4とは、上下方向から見たときに屈曲するように形成され、かつ、上下方向から見たときに回転中心C1を通過する所定の仮想線に対して略線対称に形成されている。
(もっと読む)
マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータにおいて、遠隔操作装置とスレーブアームとの構造が異なる構造であっても、逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】遠隔操作装置100からの操作信号を受けて、マスタ制御部201は、操作部101の姿勢変化に係る等価回転ベクトルVr(t)と直前の操作部101のマスタロール軸Xm(t)とを算出する(ステップS1)。Vr(t)とXm(t)のなす角φが規定値以下の場合には、冗長関節1(Roll2)と、関節1と冗長関係にある関節4(Roll1)のうち、Roll2を駆動関節とし、Roll1を固定関節として(ステップS3)、逆運動学計算を行う。角度φが規定値を以下でない場合には、Roll1を駆動関節とし、Roll2を固定関節として(ステップS4)、逆運動学計算を行う。
(もっと読む)
制御装置、産業用ロボット、座標系の再現方法、及びプログラム
【課題】座標系を設定した後にその座標系の設定に用いた基準位置データが消失した場合にも、容易にその座標系を再現することを可能にする。
【解決手段】制御装置10が、基準位置データを記憶するための基準値記憶部10aと、制御対象の所定の運動軸を所定の位置に変位させた状態で位置の検出を行うことにより位置データを取得しそれを保存する基準取得部(第1基準取得部12a、第2基準取得部13a)と、上記位置データと基準位置データとに基づいて座標系を設定する第1座標系設定部12と、基準位置データに対する位置データの相対データを取得しそれを保存する相対値取得部(第1座標系設定部12)と、基準位置データが消失したか否かを判断する判断部13cと、基準位置データが消失したと判断された場合に、上記検出により位置データを取得し、その位置データと上記相対データとに基づいて、座標系を再現する第2座標系設定部13と、を備える。
(もっと読む)
移動機構及びこれを用いたピックアンドプレース装置
【課題】 構造が非常にシンプルなピックアンドプレース装置等を提供する。
【解決手段】 ピックアンドプレース装置Aは、タイミングプーリ30をX方向に移動さ
せる移動機構1と、タイミングプーリ30に連結され且つアーム52をZ方向に移動可能
な直進アームモジュール機構2とを備えている。移動機構1は、独立して駆動可能なステッピングモータ10a、10bと、タイミングベルト23a、23bが走行可能なように同モータ10a、10bに連結されたベルト・プーリ20a,20bと、タイミングベルト23a、23bとの間に配置され且つ各ベルトが交差するように掛け回されたタイミングプーリ30と、タイミングプーリ30を軸支するとともに直線上に移動自在に案内する軸ガイド部40とを有している。
(もっと読む)
吊り下げ型作業ロボット、及び、吊り下げ型作業ロボットシステム
【課題】回動するアームの先端部にハンドリング装置を備える作業ロボットにおいて、ハンドリング装置における有効作業エリアと可動エリアの同一化を図ることで、作業ロボットの設置スペースの狭小化を実現するとともに、特に、連続的に搬送されるワークについて作業を行う場合において、工程設計の自由度の高い新規な構成を提案する。
【解決手段】水平面内において互いに直行するX軸方向、Y軸方向に移動可能に設けられる第一アーム3と、第一アーム3に対し水平面内においてθ軸方向に回動可能に設けられる第二アーム4と、を有し、前記第二アーム4の先端部にハンドリング装置5が設けられ得る、作業ロボット1とする。
(もっと読む)
溶接装置
【課題】溶接ガンの姿勢変更の際に、ロボットの動作軌道や空間移動時間が短く、さらに、段取り作業時間を短縮可能な溶接装置の提供を目的とする。
【解決手段】多関節型のロボット1と、ロボット1の先端の手首関節部1aを介して取着されるガン取付アーム2と、を備え、ガン取付アーム2にスポット溶接用の溶接ガン3を水平軸心La廻りに揺動自在に枢着した。
(もっと読む)
ロボット制御装置及び方法
【課題】ビジュアルサーボ制御中に、ワークを把持する場合に、把持動作に要する把持時間を短縮し、把持時間に比例する把持位置の誤差を低減することができるロボット制御装置及び方法を提供する。
【解決手段】ワーク1の上方(又は横方向)からその位置と姿勢をカメラ2bで計測し、計測結果に基づいてロボット3をフィードバック制御し、カメラ2bをワーク1の移動に追従させるビジュアルサーボ制御と、ビジュアルサーボ制御中に、追従点7とワーク位置との定常偏差L1を補償する位置に追従制御点6を移動させる制御点移動制御とを有し、制御点移動制御の後に、ハンド2aでワーク1を把持する。
(もっと読む)
ワーク搬送装置
【課題】 少ない駆動源でワーク保持部材を3軸方向に移動させることができ、小さな駆動源で軽快な移動動作が可能なワーク搬送装置を提供する。
【解決手段】 X,Y,Z軸の直交座標系において、第1および第2の走行体3,4は、X軸方向のレール2に沿って走行可能である。第1の走行体3は、X軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに揺動自在に第1の揺動アーム5を支持する。第2の走行体4は、Z軸方向の軸心回りに揺動自在に第2の揺動アーム6を支持する。第2の揺動アーム6の先端に、Z軸方向の軸心回りに回動自在に支持部材7を設ける。支持部材7にZ軸方向にスライド自在に支持され、かつ第1の揺動アーム5の先端にX軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに回動自在に支持されたワーク保持部材8を設ける。
(もっと読む)
部品吸着ヘッド
【課題】 小型化及び小径化を図ることによって高密度での配設を可能とし、しかも十分な吸着力を発揮することが可能な部品吸着ヘッドを提供する。
【解決手段】 先端に吸着ノズルを有すると共に当該吸着ノズルに連通する吸気通路を有する搬送シャフトと、この搬送シャフトが貫通すると共に当該搬送シャフトを周方向へは回転不能に且つ軸方向へは移動自在に保持すると共に、前記搬送シャフトの吸気通路に連通する吸引孔が設けられた円筒状ハウジングとを備え、前記ハウジングは吸着ノズル側の軸方向端部に回転軸受の装着部となる回転軸部を有し、この回転軸部の吸着ノズル側の先端にはキャップ部材が装着され、このキャップ部材には前記搬送シャフトの外周面に摺接するシール部材が内蔵されている。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長形状のガイド部の先端に設けられた把持具の姿勢を遠隔操作で変更することができ、その遠隔操作機構は比較的簡単な構成であり、かつガイド部の形状を問わない遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、先端部材2に設けられた開閉式の把持具1と、先端部材2に回転自在に設けられた回転部材13と、回転部材13の回転動作を把持具1の開閉動作に変換する回転・開閉変換機構14とを備える。ガイド部3は、回転部材13に回転を伝達する回転軸22と、両端に貫通したガイド孔30aとを内部に有する。先端が先端部材2に接して進退動作することにより先端部材2を姿勢変更させる姿勢操作部材31をガイド孔30a内に進退自在に挿通する。
(もっと読む)
マニピュレータ及びこれを用いたマニピュレーション装置
【課題】簡易でかつ新規な構造を持つ、屈曲動作が可能なマニピュレータを提供する。
【解決手段】第1駆動シャフト101は、それ自身の中心軸を中心として回動する。第2フレーム104は、第1フレーム102に対して回動する。第1フェースギヤ部材103は、第1駆動シャフト101により、正逆方向に回転駆動される。第3フレーム108は、第2フレーム104に対して回動する。第1ギヤ部材105は、第2フレーム104に固定されている。第1ギヤ部材105及び第2ギヤ部材106は、いずれも、第1フェースギヤ部材103によって回転駆動される。第2フレーム104は、第1ギヤ部材105の回動に伴って回動する。第3ギヤ部材107は、第2ギヤ部材106によって回転駆動される。第3ギヤ部材107は、第3フレーム108に固定されている。第3フレーム108は、第3ギヤ部材107の回動に伴って回動する。
(もっと読む)
ノズル吸引式の対象物の搬送装置、搬送方法及びこれらに用いられるプログラム
【課題】磁気ヘッドのスライダチップなどの微小部品のノズル吸引式による搬送装置において、従来の装置構成に変更を加えることなく、自動的に、ノズル吸着位置のずれによる影響を最小限に抑えて搬送不良を防止することができる搬送装置及び搬送方法を提供する。
【解決手段】ノズル吸着位置がずれた場合であっても、ノズルを回転させてノズル吸着位置のずれの影響が最小限となるノズル回転位置を撮像画像から検出し、その回転位置にて搬送を行うことにより、ノズル吸着位置のずれに対する調整を自動的に行うことができる。
(もっと読む)
被塗装物保持ロボットおよび塗装用ロボットシステム
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
ロボット制御装置、ロボットの制御方法
【課題】ロボットの制御を可能にするロボット制御装置を提供する。
【解決手段】ロボット制御装置は、基体1に対して回転運動可能なリンク3と、リンク3を駆動するモーター4と、モーター4のトルクをリンク3に減速比Nで伝達する減速機5と、モーター4の回転角θM1を検出する角度センサー6と、基体1に対するリンク3の角速度ωL1を検出する角速度センサー12と、角速度ωL1の積分値のうち第1の周波数fH以上の高周波成分、及びθM1*Nのうち第2の周波数fL以下の低周波成分を用いリンク3の回転角を算出する演算部15と、を備え、第1の周波数fHと第2の周波数fLとが異なる。このことによって、角速度センサー12のバイアスドリフトの影響を排除し、特定の周波数を強調したり除去した角度の信号を得ることができる。
(もっと読む)
デルタ運動ロボット
【課題】パラレルリンク式のロボットにおいて、ツール取付部に対して垂直軸回りの自由度を、小さな機械的作用で駆動可能とすること。
【解決手段】ツール取付部10を有するデルタ運動ロボットにおいて、前記ツール取付部10は、制御アーム12を介してロボット基部14に接続されているジョイントプレートと、前記ツール取付部10に取り付けられたツールを回転させる駆動部と、を有し、前記駆動部は前記ジョイントプレートに固定されていることを制御アーム12を介してロボット基部に接続されているジョイントプレートと、前記ツール取付部10によって取り付けられたツールを回転させる駆動部と、を有し、当該駆動部は当該ジョイントプレートに固定される構成とした。
(もっと読む)
1 - 20 / 89
[ Back to top ]