
Fターム[3C007CS00]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360)
Fターム[3C007CS00]の下位に属するFターム
軌道に沿って走行するもの (64)
無軌道で移動するもの (1,271)
駆動機構を内蔵しているもの(走行駆動機構を除く) (6)
固定手段(ロック機構、アウトリガー等) (16)
Fターム[3C007CS00]に分類される特許
1 - 3 / 3
ロボット設置構造
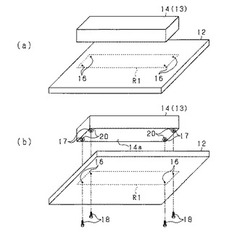
【課題】作業者の技量に関係なく、ロボットの設置作業を効率よく実施する。
【解決手段】架台は、平板状をなすステージ12を備えており、そのステージ12の上面側にロボット13が設置されている。ロボット13は、ステージ12上に載置された状態で、ステージ下面側から複数のネジ18により固定される。ステージ12には上下に貫通する貫通孔16が設けられている。ロボット底面部には、基準位置としてのネジ孔17が設けられているとともに、マーキングシート20が貼り付けられている。マーキングシート20には、そのネジ孔17に対する方向情報と同ネジ孔17までの離間距離情報とが付与されたマーキングが付されている。
(もっと読む)
ロボット及びロボットのベースの製造方法

【課題】押出し加工を利用しつつ、回転動作に適した形状の筐体を実現できるロボットを提供する。
【解決手段】スカラロボット1は、ベース2と、ベース2に対して第1軸A1回りに回転可能な第1アーム3とを備え、ベース2の外形を構成する筐体8のうち第1軸A1に沿う外周部10は、第1軸A1の軸方向への押出し加工により形成されている。
(もっと読む)
ロボットステーション
【課題】 ワークを搬送するアームおよびハンド部の動作範囲に死角が生じないようにし、全方位に等しくワークを送り出し尚かつどの方位の作業ステーションからもワークを受け取ることができるようにする。
【解決手段】 ロボット移動ステーション1を中心として各作業ステーション2がワーク10に対し組立・加工・洗浄等の各工程が行われる各作業ステーション2にワーク10を送り出しあるいは各作業ステーション2からワーク10を受け取り又はワーク10に対して作業を行う産業用ロボットMを載置する回転テーブル5と、回転テーブル5の中央に配置され、これと一体となって回転可能な回転軸3と、回転軸3近傍に配置した回転軸3を回転させる回転軸用駆動装置4とを備え、回転テーブル5を中心として各作業ステーション2がその周囲に配置されるとともに、産業用ロボットMは、回転テーブル5とは独立の駆動ユニットとなっている。
(もっと読む)
1 - 3 / 3
[ Back to top ]