
Fターム[3C007CS08]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 無軌道で移動するもの (1,271)
Fターム[3C007CS08]に分類される特許
1 - 20 / 1,271
ロボットの軌道計画システム及び軌道計画方法
【課題】少ないノードで軌道計画の成功率を向上させることができる、ロボットの軌道計画システムを提供する。
【解決手段】本発明の一形態に係るロボットの軌道計画システム10は、グラフ構造データ格納手段に格納されているグラフ構造に対して、スタートノード及びゴールノードを追加し、さらに最終姿勢のハンドの周辺空間にノードを追加して、追加したノードと、隣接するノードとをエッジで接続し、スタートノードからゴールノードまでを結ぶ経路を探索するグラフ構造探索処理手段と、グラフ構造探索処理手段により探索された経路に含まれるノードが示す姿勢が、環境情報と干渉するか否かを判定し、干渉していると判定した場合には、ノードをグラフ構造から除外するノード有効性判定手段と、を備える。
(もっと読む)
移動ロボットシステム、移動ロボット制御装置、該制御装置に用いられる移動制御方法及び移動制御プログラム

【課題】高度な計算処理装置や操作者による画面の連続的な注視を必要としない移動ロボットシステムを提供する。
【解決手段】タッチパネル22は、操作者が押下することにより、表示されている画面内の任意の位置を指定可能な構成とされている。
タッチパネル22に表示されている画面内にある任意点の位置を操作者が指定(画面タッチ)したとき、任意点の位置に対応する実際の位置を目標位置(目標地点P)として、ロボットの移動機構を制御して同ロボットを自動的に移動すると共に、操作者の手動による操作に対応して移動機構を制御するための融合型操作インタフェース(タッチパネル22、マニュアル操作部23)が設けられている。
(もっと読む)
ロボットシステム
【課題】少ない時間で操作を習得することができる、直感的なロボットの遠隔操作インタフェースを提供する。
【解決手段】ロボットの操作装置が、カメラから取り込まれたカメラ映像が表示されるタッチスクリーンと、カメラ映像からロボットの3次元的な位置及び姿勢を認識するロボット認識部と、ロボット認識部で認識した位置及び姿勢とからロボットのCG映像を生成し、CG映像をタッチスクリーン上のロボットのカメラ映像に重畳表示するCG合成部と、ユーザのタッチ操作に応じて、タッチスクリーン上でCG映像のロボットを仮想的に動作させる操作入力部と、CG映像のロボットの仮想的な動作に追従してロボットが動作するように、ロボットに対して制御命令を送出するロボット制御部と、を有している。
(もっと読む)
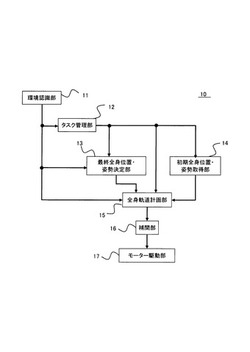
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
ロボットシステムおよびそれに用いる空間陣形認識装置
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
コミュニケーションロボット
【課題】人で混雑した環境にも適応できる多様なコミュニケーションを提供すること。
【解決手段】コミュニケーションロボット10は、密集度DBを含み、人と共存する様々な環境に配置されて様々なコミュニケーション行動を実行する。密集度DBには、環境を区分したエリアのそれぞれと対応付けて、当該エリアにおける密集度の許容値が記憶される。コミュニケーションロボット10は、コミュニケーション行動を実行する際には、自身の現在地を取得するとともに、その現在地が含まれるエリアの現在の密集度を取得する。そして、現在地が含まれるエリアの密集度が当該エリアに対応する許容値以上か否かを判断し、その判断結果に従って、コミュニケーション行動の実行を制御する。
(もっと読む)
多形態ロボット
【課題】平地では姿勢を変えることなくすべての方向に移動でき、転倒しても移動可能な姿勢に復帰でき、凹凸の激しい路面で常に重心を安定させて移動でき、また狭い場所への進入、パイプ等の内部移動、円柱を挟み込むことで昇降動作を行なうことができる多形態ロボットを提供する。
【解決手段】上下・前後・左右対称な形状とするボディとボディ2を支持する移動機構と移動機構に使用する全方向移動部材と、駆動輪を脚の先に結合しそして駆動輪の結合部に関節を1つ設ける脚部9と、脚先の関節6以外また可移動範囲を歩行動作時に必要な関節角度の2倍とする3つの関節3、4、5と、四足の脚部、を備える。
(もっと読む)
二足歩行ロボット
【課題】脚体にかかる負担を軽減してロボットの作業能力を向上させることができる二足歩行ロボットを提供する。
【解決手段】上体1を上側の上部基体5と下側の下部基体6とで構成する。下部基体6に上部フレーム9と下部フレーム10とを設ける。下部フレーム10に脚体2を連結する。上部フレーム9に回転軸12を介して上部基体5を連結する。上部フレーム9を、揺動軸27を介して下部フレーム10に連結する。下部フレーム10に対して上部フレーム9を揺動させることにより、ロボットの上体1で前屈姿勢をとることが可能となる。
(もっと読む)
作業ロボット
【課題】左右の車輪の一方が障害物に乗り上げた場合であっても転倒することを抑制でき、安定して走行可能な作業ロボットを提供すること。
【解決手段】作業ロボットは、ロボット本体2及び遠隔監視装置からなり、これらはそれぞれ送信機及び受信機を備え、撮影装置による映像を遠隔監視装置の受信機で受信し、遠隔監視装置の操作部からの操作信号をロボット本体2の受信機で受信する。ロボット本体2は、車台4と、撮影装置と、前輪駆動機構5と、後輪駆動機構6とを備え、各駆動機構5,6は車輪7,8を駆動するモータを備え、遠隔監視装置の操作部で操作可能である。前輪7及び後輪8のホイールが、そのホイールの中心より外側方に先端が位置するように突設されて前記ロボット本体2の転倒を防止する転倒防止部材14をそれぞれ備え、各転倒防止部材14は、少なくとも先端部分のホイールの中心線に垂直な断面が円形に形成されている。
(もっと読む)
ロボット装置
【課題】頭部の高さを低く抑えたままで広い認識可視領域を確保可能なロボット装置を提供すること。
【解決手段】ロボット1は、胴体2と、胴体2の上部に連結された首関節機構4と、首関節機構4により支持された頭部5と、頭部5の前面に配置された認識部6と、を備える。首関節機構4は、胴体2の上面に対する水平方向を長軸とし、胴体2の上面に対する垂直方向を短軸とする楕円形の軌道に沿って、頭部5を移動させることを特徴とする。
(もっと読む)
ロボット用肢体駆動機構、およびこの肢体駆動機構を用いたロボット装置
【課題】低コストで製造可能であり、上肢を上方に持ち上げてその状態を長時間維持することができるロボット装置と、ロボット用肢体駆動機構を提供する。
【解決手段】ロボット用肢体駆動機構は、胴体部11と、胴体部11に対して可動自在に設置される肢体支持部材21と、肢体支持部材21に対して設置される可動肢体22と、胴体部11に固定設置されて駆動力を及ぼすアクチュエータ24と、複数のリンク23a,23cと、当該複数のリンク23a,23cを可動自在に接続するジョイント23bとから構成され、一端側のリンク23aがアクチュエータ24に接続し、他端側のリンク23cが肢体支持部材21と接続することで、アクチュエータ24と肢体支持部材21とをリンク接続するリンク部材23とを備えており、アクチュエータ24から及ぼされる駆動力が、リンク部材23を介して肢体支持部材21に伝達される。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
移動ロボット、移動ロボット用の学習システムおよび移動ロボットの行動学習方法
【構成】 移動ロボット10は、周囲反応情報データベース88を備え、イベント会場や街中などの人と共存する様々な環境に配置され、案内および荷物運搬などの様々なサービスを提供する。そして、サービスを提供する際には、複数種類の移動の仕方によるサービスの提供を試み、自身の行動に対する周囲の人の反応状況から適切な行動を学習して、その後のサービスの提供に生かす。
【効果】 周囲の人の反応状況から適切な行動を学習するので、人と共存する環境において効果的にサービスを提供できる。
(もっと読む)
マイクロフォンシステム
【課題】音声認識に必要な振動数領域内の固体伝播音及び空気伝播音によるノイズを抑制することが可能なマイクロフォンシステムを提供する。
【解決手段】マイクロフォンシステムは、受音部21が前面側に設けられたマイクロフォン22、及びマイクロフォン22の後面側に取り付けられたウェイト23を有するマイクロフォンユニット20と、音穴11と連通する開口31を有し、マイクロフォンユニット20の前面側と頭部筐体10とにそれぞれ密着して配置される第1柔軟部材30と、頭部筐体10に固定されたケーシング40と、ケーシング40に保持され、マイクロフォンユニット20の後面側に密着して配置される第2柔軟部材50とを備える。
(もっと読む)
操作環境モデル構築システム、および操作環境モデル構築方法
【課題】作業ロボットの導入環境のモデル化負担を低減すること。
【解決手段】操作環境モデル構築システム100は、被操作体の計測により得られる立体像に対して幾何プリミティブを適応させて被操作体の幾何的特性を示す幾何情報を生成し、幾何情報の生成対象である被操作体の空間位置を示す位置情報を取得し、被操作体に対して作業ロボットにより行われるべき操作内容を示す操作情報を、生成された幾何情報及び取得された位置情報に対して関連付けて記憶する。被操作体に対して操作タグを仮想的に設定することができ、作業ロボットの導入環境のモデル化負担の低減を図ることができる。
(もっと読む)
連結移動装置
【課題】移動体が目標地点へ移動している途中で、バッテリー残量が低下しても、当該移動体が継続して移動できるようにする。
【解決手段】連結移動装置10は、不整地上を移動する複数の移動体3と、これらの移動体3を連結し電力を伝達可能な線状体5とを備える。複数の移動体3が、線状体5で連結された状態で移動する。各移動体3は、不整地上を移動するための移動手段と、給電されることにより該移動手段を駆動する駆動装置と、移動用エネルギーを蓄積し該エネルギーを用いて駆動装置に給電する給電装置と、を有する。各移動体3の給電装置は、他の移動体の給電装置から線状体5を介して電力を受けられるようになっている。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
二足歩行ロボット
【課題】簡単な構成で人間に近いスムーズな歩行、また外部からの衝撃にも倒れづらい二足歩行ロボットを実現する。
【解決手段】永久磁石4、4A、4B、4Cと鉄板9、9A、9B、9Cをそれぞれ吸着させる。永久磁石4、4Aを取り付けた板5をモーター3によって90度回転させ、永久磁石4は鉄板9からアルミ板8A、永久磁石4Aは鉄板9Aからアルミ板8Aの上にそれぞれスライドさせ、永久磁石4と鉄板9、永久磁石4Aと鉄板9Aによる吸着をとく。その状態からモーター3B、3Cを右足1の底面が床面10と平行に持ち上がるようそれぞれ30度回転させると重心移動を要さずに右足2を持ち上げる事が出来る。右足1を持ち上げた後、モーター3B、3Eを足1が床面10と平行に接するようにそれぞれ30度回転させると前進することができる。
(もっと読む)
マスタ・スレーブ型ロボット操作システム
【課題】安価で操作性に優れたマスタ・スレーブ型ロボット操作システムを提供する。
【解決手段】マスタ・スレーブ型ロボット操作システムは、操作者によって操作されるマスタ操作装置10と、遠隔操作されるスレーブロボット装置と、マスタ操作装置とスレーブロボット装置との間で両装置の状態情報を双方向通信する情報通信手段30とを備える。スレーブロボット装置は、任意の姿勢又は動作を実現するために複数のアクチュエータを備えている。マスタ操作装置10は、スレーブロボット装置が備える構造に対応する構造を備えることでスレーブロボット装置が取り得る任意の姿勢又は動作と同様の姿勢又は動作を実現可能であり、且つ、スレーブロボット装置に設置された複数のアクチュエータに対応した複数のアクチュエータ13a〜13hを備えている。
(もっと読む)
外力判定用パラメータ決定装置及びプログラム、並びに移動体装置
【課題】ロボットに与えられている外力判定を高精度に行うための閾値を決定する。
【解決手段】近似部142が、ロボットに対して人的操作による外力及び積載による外力をそれぞれ与えたときにロボットに加わる垂直抗力を所定のサンプリング周期(Δt)で取得し、各サンプリング間隔における垂直抗力の変動量を指数関数で近似する。また、取得部144が、f0の値を変更しつつ、各外力における垂直抗力の変動量がf0を超える確率GL、GHをそれぞれ求め、それらの確率の差分を取得する。そして、パラメータ導出部146が、取得部が取得した確率の差分に基づいて選択されるf0の値を、外力の判定に用いるパラメータ(閾値fc)とする。
(もっと読む)
1 - 20 / 1,271
[ Back to top ]