
Fターム[3C007CT00]の内容
マニピュレータ、ロボット (46,145) | コラム (498)
Fターム[3C007CT00]の下位に属するFターム
Fターム[3C007CT00]に分類される特許
1 - 4 / 4
スカラロボット
【課題】アームの上下のデッドスペースを低減したスカラロボットを得ること。
【解決手段】ベース10と、第1関節軸を介して水平面内で回動可能にベース10に連結された第1アーム1と、第2関節軸を介して水平面内で回動可能に第1アーム1に連結された第2アーム2と、第2アーム2の先端部に上下動するように設置された先端軸4とを備えたスカラロボットであって、ケーブル15を収容してベース10と第1アーム1との間に架け渡された第1ケーブルダクト11及びケーブル15を収容して第1アーム1と第2アーム2との間に架け渡された第2ケーブルダクト12を備え、第1、第2ケーブルダクト11、12の一端は第1、第2関節軸上に位置しており、第1及び第2ケーブルダクト11、12は、上下方向に関して先端軸4の可動域上下動の範囲内に収まるように設置された。
(もっと読む)
マニプレータシステム

【課題】マスタースレーブ方式のマニプレータにおいて、簡便な手法で作業者とマスターアームの干渉を無くし、作業者の動作範囲を広く確保する。
【解決手段】腕部11及びハンド部20を有するマスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、作業者Pがマスターアーム10に動作を入力する動作入力部が、マスターアーム10のハンド部20に設けられ、マニプレータシステム躯体へのマスターアーム10の取付部が、ハンド部20を挟んで、作業者Pの操作位置A1に対向するように設けられている。
(もっと読む)
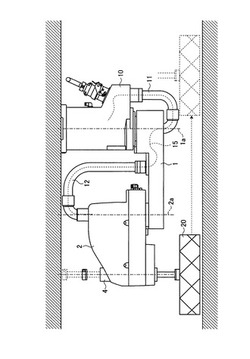
塗装ロボット
【課題】 駆動モータを防爆型のモータを必要とせず、しかも、モータ容量を低減化できるようにする。
【解決手段】 塗装ロボットの各軸を駆動するモータをベース部11に集中配置し、ベース部が設置される空間と、ロボット本体が設置され塗装工程を行う作業空間との間を仕切壁24で隔絶する。
(もっと読む)
多関節ロボット
【課題】 2つの関節アームにて平面的な作業を有効的に行うことができる多関節ロボットを提供する。
【解決手段】 第1の関節アーム1および第2の関節アーム3が連接されて成り作業領域面A上の作業を行う多関節ロボットにおいて、第1の関節アーム1は一端1aに第1の関節アーム1を作業領域面Aにおいて水平方向に回転するために作業領域面Aにおいて鉛直方向にて成る第1の回転軸2を有し、第2の関節アーム3は第2の関節アーム3を作業領域面Aにおいて水平方向に回転するために作業領域面Aにおいて鉛直方向にて成る第2の回転軸4を介して第1の関節アーム1より作業領域面A側に配設され、作業領域面A上において第1の回転軸2を回転可能に保持する保持手段5を備え、第2の関節アーム3の回転移動半径R2は第1の関節アーム1の回転移動半径R1と同一長さにて成る。
(もっと読む)
1 - 4 / 4
[ Back to top ]