
Fターム[3C007CV01]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が直線運動するもの (116)
Fターム[3C007CV01]の下位に属するFターム
Fターム[3C007CV01]に分類される特許
1 - 2 / 2
搬送装置
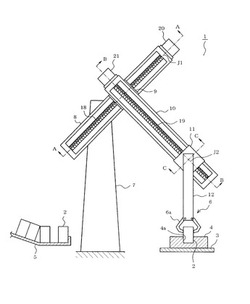
【課題】第1軸方向、第2軸方向の等速移動区間を長くでき、また、第1軸方向および第2軸方向のうち、いずれかの方向で単独で行われる加速・減速の回数を少なくする。
【解決手段】第1軸ガイド8に沿って移動するスライダー9の移動方向J1と、第2軸ガイド10に沿って移動するホルダー11の移動方向J2が、ホルダー11に取り付けられたチャック6の把持および把持解除の前後に行われる垂直方向の上下移動並びに搬送対象物を搬送元から搬送先に向かって運ぶための水平方向の搬送移動とに対し、平行ではなく、チャック6が搬送対象物を把持してから搬送先で把持解除するまでのホルダー11の移動を、第1軸駆動機構によるスライダー9のJ1方向への移動と第2軸駆動機構によるホルダー11のJ2方向への移動とを合成することによって行わせる。
(もっと読む)
単軸ロボット

【課題】渦電流によって動力性能が低下することを防ぎながら、コイルを効率よく冷却することができる単軸ロボットを提供する。
【解決手段】リニアガイド13に往復動自在に支持されたスライダ14を備える。このスライダ14に内蔵されたコイル21を棒状のステータ22が貫通する可動コイル形リニアモータ15を備える。前記コイル21と前記スライダ14の内面との間に含浸させたエポキシ樹脂54によって前記コイル21が前記スライダ14に接着される。前記スライダ14の内面に複数のフィン61を突設した。
(もっと読む)
1 - 2 / 2
[ Back to top ]