
Fターム[3C007CV03]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が直線運動するもの (116) | 進退するもの (24)
Fターム[3C007CV03]に分類される特許
1 - 20 / 24
産業用ロボット
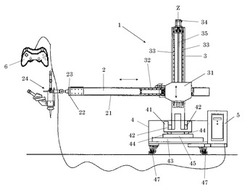
【課題】産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1が、アーム2と、アームを支えることが可能な柱部材3と、柱部材の土台4とを備える産業用ロボットであって、アームは、柱部材に対して、アーム先端部22からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラ6を備えていることからなる。
(もっと読む)
基板搬送装置および基板搬送システム

【課題】基板カセットと基板受け渡し先との間でガラス基板の受け渡しを効率良く行うことのできる廉価でコンパクトな構成の基板搬送装置を提案すること。
【解決手段】基板搬送装置2は、ガラス基板7の縁端をクランプしエアー浮上させた状態で、基板カセットからガラス基板7を引き抜くので、狭い間隔で高密度に収納されているガラス基板を引き抜くことができ、エアー浮上状態でガラス基板7を移動させるので、ガラス基板に損傷、異物付着が生じない。基板載置面に引き込まれたガラス基板を基板支持アームで支持し、この状態で基板搬送装置2が収納先の基板カセットまで移動し、基板支持アームによってガラス基板を引き渡し先に渡す。一台で基板カセットからのガラス基板の引き抜き、移送、基板受け渡し先への引き渡しを行うことができ、設置スペースが少なくて済む廉価でコンパクトな基板搬送システムを構築できる。
(もっと読む)
吊り下げ型作業ロボット、及び、吊り下げ型作業ロボットシステム
【課題】回動するアームの先端部にハンドリング装置を備える作業ロボットにおいて、ハンドリング装置における有効作業エリアと可動エリアの同一化を図ることで、作業ロボットの設置スペースの狭小化を実現するとともに、特に、連続的に搬送されるワークについて作業を行う場合において、工程設計の自由度の高い新規な構成を提案する。
【解決手段】水平面内において互いに直行するX軸方向、Y軸方向に移動可能に設けられる第一アーム3と、第一アーム3に対し水平面内においてθ軸方向に回動可能に設けられる第二アーム4と、を有し、前記第二アーム4の先端部にハンドリング装置5が設けられ得る、作業ロボット1とする。
(もっと読む)
ロボット
【課題】全体の大きさや重量を大きくすることなく可搬重量を増やす。
【解決手段】水平多段式伸縮装置3のベース11を、直動ガイド13の長さより短い寸法に形成し、且つこのベース11の下面に同じく直動ガイド13の長さより短い寸法の平行状態をなす一対のレール摺動体12L、12Rを設けている。又、直動ガイド13を2本のレール17L、17Rと二つの連結端板18A(ひとつのみ図示)とから構成している。さらに一対のレールレール17L、17Rを連結するについて各レールの端面で各連結端板18Aをねじ止めする構成とした。
(もっと読む)
ロボットの関節装置
【課題】人や動物などに触れるロボットの関節装置であって、人に触れた場合に当該人が不快感を覚えることなく実際の人と接触しているような状態を実現できるロボットの関節装置を提供する。
【解決手段】ロボット1の関節装置は、回転可能且つ軸方向に移動可能に軸支されウォーム32aを備える軸部材32と、ウォーム32aに噛合し出力部材38が連結されるウォームホイール36を備える。ウォームホイール36は、ウォーム32aの回転により回転し、ウォームホイール36から軸部材32に逆入力されると軸部材32を軸方向に移動させる。軸部材32の軸方向移動量は検出部45により検出され、外力推定部80が、検出部45により検出される軸方向移動量に基づいて出力部材38が受けた外力を推定する。そして、制御部70が、指令値および外力推定部80により推定された外力に基づいて、アクチュエータ34を制御する。
(もっと読む)
基板処理装置およびその方法ならびに基板搬送装置
【課題】基板の搬送時間を十分に短縮できる基板処理装置およびその方法ならびに基板搬送装置を提供する。
【解決手段】インデクサブロックおよび処理ブロックからなる基板処理装置において、インデクサブロックと処理ブロックとの間で、基板WがインデクサロボットIRにより搬送される。インデクサロボットIRは上下に並ぶように設けられた複数のハンド要素260を備える。ハンド要素260間の距離は、インデクサブロックに搬入される基板Wが収納されたキャリアの基板収納溝間の距離と等しい。また、インデクサブロックおよび処理ブロック間に設けられる基板載置部PASS2の上下に隣接する支持板51a間(および支持板52a間)の距離は、ハンド要素260間の距離の2倍である。
(もっと読む)
リニア軸のケーブル処理機構およびそれを用いた基板搬送装置
【課題】リニア軸を有する装置において高さ方向や幅方向に制限がある場合であってもリニア軸のケーブル処理機構が必要なスペースを小さくでき、さらにリニア軸を2本並設する場合であっても、装置サイズを小さくすること。
【解決手段】ケーブルガイド37、38が、一端がベース部材34に固定され、U字状に湾曲して、その他端がスライド部材27a、27bに固定され、スライド部材27a、27bの進退方向に沿って延在するよう配置され、スライド部材27a、27bの進退方向から見てベース部材34に対して傾斜するよう配置した。
(もっと読む)
搬送装置
【課題】搬送装置、搬送ロボットにおいて、ア−ム収納時の平面的な干渉領域を省スペ−スにする。
【解決手段】アーム2を、鉛直方向に延在するアームカバ6と、アームカバ6下方の開口部33から出入可能であって、鉛直方向の上方にのみ湾曲可能なアーム体31と、アームカバ6内に設けられ、開口部33からアームカバ6内上方との間で、アーム体31を水平と垂直の姿勢に案内するガイド13〜15と、アーム体31の一端を支持してアーム体31を鉛直方向に動作させる駆動機構7と、で構成し、アーム体31が、駆動機構によってアームカバ6内で引き上げられた際、アームカバ6内で鉛直方向の姿勢となるようにした。
(もっと読む)
産業ロボット
【課題】主に上向きの作業を行い、前後左右方向に限られた空間に複数のロボットを稠密設置可能な、干渉域の少ない省スペースな、かつモータ・減速機への負荷を低減することができ、モータ・減速機容量を小さくすることが可能なアーム構造を有する産業ロボットを提供。
【解決手段】固定ベース1上に第1水平軸aの回りに回転自在に支持された第1垂直アーム2と、第1垂直アーム2の先端に第1水平軸aと直交する第2水平軸bの回りに回転自在に支持された第2垂直アーム3と、第2垂直アーム3の先端に第2水平軸bと直交する第1旋回軸cの回りに回転自在に支持された第1旋回アーム4と、第1旋回アーム4上に支持された軸方向に直線移動可能な第3垂直アーム5と、第3垂直アーム5の上に支持された手首機構6とを有する。
(もっと読む)
スカラロボット
【課題】アーム部の位置制御が容易でロボット先端部の配置位置と目標位置とのズレの少
ないスカラロボットを提供する。
【解決手段】スカラロボット1は、ベース部2、アーム部3、テーブル部4から構成され
、ベース部2は、床面等に設置されたベース10を有する。アーム部3は、ベース10に
対して回転可能に第1のアーム11を、第1のアーム11に回動可能に第2のアーム12
を、第2のアーム12に回動可能に先端部13Bにツールの取付可能な第3のアーム13
を備えている。テーブル部4は、先端に回動板22を備えた駆動軸21がベース10の正
面10Bから水平方向に突出されている。回動板22は、その中央部に突出した第5モー
タの駆動軸に回転可能に作業テーブル24の中央部を連結固定している。作業テーブル2
4は、ワークを保持する一対のチャック26を備えている。従って、ワークは作業テーブ
ル24の回転により回動される。
(もっと読む)
マニピュレータおよびそれを複数備えたパワーアシスト装置
【課題】マニピュレータおよびそれを複数備えたパワーアシスト装置において、操作性の向上を図る。
【解決手段】パワーアシストアーム1は、動作部としての直動関節5と、回転関節6と、ハンド部8とを備えている。また、パワーアシストアーム1は、各動作部を操作する第1操作部11および第2操作部12と、直動関節5を駆動する直動関節駆動装置と、回転関節6を駆動する回転関節駆動装置と、ハンド部8を駆動するハンド部駆動装置とを備えている。第1操作部11はハンド部8から離れた位置にあり、第2操作部12はハンド部8に近接した位置に設置されている。パワーアシストアーム1は、直動関節5、回転関節6およびハンド部8の力覚を第1操作部11に提示する直動関節力覚提示装置、回転関節力覚提示装置およびハンド部力覚提示装置を備えている。
(もっと読む)
基板搬送装置
【課題】基板の予備位置決め機構を搬入ステージ、露光ステージに設置することなく、露光ステージに搬送する前に基板の予備位置決めを行うことができ、ピンの設置位置の調整も簡単な基板搬送装置を提供することを課題とする。
【解決手段】前記搬入ステージ30上の基板Wの端面を押動して予備位置決めを行う予備位置決め機構2と、この予備位置決め機構を支持本体12により支持すると共に、予備位置決めされた基板を吸着して保持し前記露光ステージ40に搬送する搬送機構20とを備え、前記予備位置決め機構は、前記支持本体に支持された駆動手段6と、この駆動手段により駆動して前記基板の端面を押動する押動手段2とを有し、前記駆動手段は、円筒形の磁気軸体7と、この磁気軸体を軸周りに回動させる回動手段8と、この回動手段により回動する磁気軸体の周面に対面させて設けた直線状の第1長尺磁気体9Aおよび第2長尺磁気体9Bと、を有する構成とした。
(もっと読む)
外科用マニプレータ
【課題】
【解決手段】本発明は、外科用すなわち医療用ツールが6自由度までの動きをするよう操作することのできる外科用マニプレータを提供する。該マニプレータは、接触型インターフェースと、それに関係した位置検知システムとを有している。マニプレータ及び接触型インターフェースの互いに相対的な向きに基づく、動きの情報が、接触型インターフェースから与えられる。この動きの情報を調節するため使用することのできるコントローラが提供される。
(もっと読む)
ロボットアーム
【課題】高圧空気を駆動源とするワーク保持手段への配管が外部に露出せず、省スペース化が可能であると共に、メンテンス性を良好に保つことが可能なロボットアームを提供する。
【解決手段】軸方向に沿って所定のピッチで多数の磁極が配列されたアーム軸3と、このアーム軸3が遊嵌する貫通孔を有すると共に該アーム軸3と相まってリニアモータを構成し、印加される電気信号に応じて前記アーム軸3を軸方向へ進退させるフォーサと、前記アーム軸3の一端に設けられると共に空気圧に応じて動作するワーク保持手段4とから構成され、前記アーム軸3には前記ワーク保持手段4に対して空気圧を作用させるための流体供給孔30が軸方向に沿って貫通形成され、この流体供給孔30がワーク保持手段4の供給ポートに接続されている。
(もっと読む)
取扱マニピュレータ装置
【課題】汎用的に適用可能で、特に好適には工作機械に前面入口から加工材または工具を送給または取り出すことに適する取扱マニピュレータ装置を得る。
【解決手段】取扱マニピュレータ装置1に、垂直方向に延在し垂直軸線の周りに回転可能な主支持体2と、垂直方向に移動可能な垂直キャリッジ9によって主支持体2に支持した水平伸展アーム12および、直接的または間接的に水平伸展アーム12に支持したグリッパ18を設け、水平伸展アーム12をリニアガイドによって水平方向に移動可能に垂直キャリッジ9に支持し、水平伸展アーム12に垂直軸線15の周りに回転可能な関節連結アーム14を設け、この関節連結アーム14の端部にグリッパを設ける。好適には、主支持体2を水平方向に移動可能な主キャリッジ5上に固定する。
(もっと読む)
搬送装置
【課題】昇降動作のストローク量を大きく確保するとともに装置全体の高さを低く抑えることができる、低床型の搬送装置を提供する。
【解決手段】固定ベース1と、旋回ベース2と、この旋回ベース2を固定ベース1に対して昇降させる昇降機構3と、旋回ベース2を鉛直状の旋回軸Os周りに旋回させる旋回機構と、旋回ベース2に支持された直線移動機構5と、直線移動機構5に支持され、直線移動機構5の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド6A,6Bとを備えた搬送装置Aであって、昇降機構3は、固定ベース1に対してテレスコピック状に伸縮するように組み合わされた2段の昇降部材31,32と、各段の昇降部材をその下位段の部材に対して昇降させる第1および第2の昇降駆動機構33,34と、を備えて構成されており、かつ、旋回ベース2は、最上位段の昇降部材32に支持されている。
(もっと読む)
ピペット
【課題】熟練者に頼ることなく精度よく位置決めすることができ、作業効率を向上する。
【解決手段】ピペット24、34のZ軸テーブル28、38への装着、並びに、キャピラリ24A、34Aのピペット24、34への装着に際し、ピペット24、34には第1の突き当て部材35を設け、キャピラリ24A、34Aには第2の突き当て部材37を設けたため、手作業であっても、ある程度の位置決め精度を期待することができる。
(もっと読む)
ロボット
【課題】作業ユニットに対する配線作業をより容易化する。
【解決手段】本発明にかかる直交型ロボット1は、特定方向に移動可能なスライダ43に、所定の作業を行うための作業ユニット10が取り付けられるように構成されており、上記ロボット1の駆動源である各種モータ17,35,47とそのコントローラ2とは、屈曲自在なケーブル保持部材63,71の内部を通るように配索されるケーブル56,54等を介して電気的に接続されている。上記ケーブル保持部材63,71の内部には、上記ケーブル56,54を通すための第1の配索空間83,85と、上記作業ユニット10に接続される作業ユニット用ケーブル79を通すための第2の配索空間84,86とが形成され、これら第1および第2の配索空間(83,84等)が、仕切部材75,76を介して互いに仕切られている。
(もっと読む)
直交ロボット
【課題】 微調整および組立てに際して、作業に時間があまりかからず、容易に所定の姿勢に組立て可能な直交ロボットを提供することにある。
【解決手段】 1個の直交軸に他の直交軸を組み合わせる直交ロボットにおいて、この1個の直交軸に設けた他の直交軸を取付けるためのブラケットに、他の直交軸の姿勢を調整する調整機構を設けたこと、を特徴とする1個の直交軸に他の直交軸を組み合わせる直交ロボットとした。 また、この調整機構は、ネジの押し引きにより、調整を行うことを特徴とすることとした。
(もっと読む)
ワーク搬送装置の制御方法および制御装置
【課題】ノイズに強い光通信方式を採用するとともに、キャリッジの位置ずれ検出を高い信頼性で、かつ安価な構成により実現する。
【解決手段】ガイドレール6の特定位置においてキャリッジ7を検出する近接スイッチ37,38,39および位置検出板40と、固定側に設けられるコントローラ31と、キャリッジ7の現在位置を検出するエンコーダと、このエンコーダとコントローラ31との間で光通信によりデータの授受を行う通信手段とよりなり、コントローラ31は、キャリッジ7の前記特定位置に対する位置データを記憶する記憶装置と、この記憶装置に記憶されている位置データと、通信手段を介してエンコーダから送信されてくるキャリッジ7の現在位置データとを比較し、その偏差が許容範囲内にあるか否かを判定する。
(もっと読む)
1 - 20 / 24
[ Back to top ]