
Fターム[3C007CX00]の内容
マニピュレータ、ロボット (46,145) | 関節 (545)
Fターム[3C007CX00]の下位に属するFターム
関節部に駆動源を有するもの (234)
関節部に減速機を組み込むもの (198)
関節部にロック機構を設けるもの (40)
関節にクラッチを設けるもの (13)
関節にストッパを有するもの (16)
Fターム[3C007CX00]に分類される特許
1 - 20 / 44
基板搬送ロボット
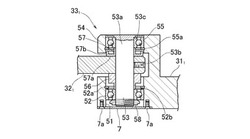
【課題】真空処理装置内で使用される基板搬送ロボットであって、ロボットアームの関節部は、一方のアーム部材に形成した上下方向に貫通する軸支孔と、軸支孔に装着したベアリングと、他方のアーム部材に固定した、ベアリングに挿入される支軸とを備えるものにおいて、ベアリングでの発塵で生ずるパーティクルによる真空処理装置内の汚損を防止できるようにする。
【解決手段】一方のアーム部材311の下面に、軸支孔51を下方から覆うカバー7が着脱自在に取り付けられる。また、支軸53が他方のアーム部材321上方に突出する上部軸部53aを有し、一方のアーム部材311に、上部軸部53aが挿入される上部ベアリング55を装着した筒部54を設ける場合には、上部ベアリング55の内輪と他方のアーム部材321との間に介設するカラー57の下端に、外周に立上り部57bを有するフランジ部57aを形成する。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド

【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する転がり軸受とを有する軸受ユニットと、を備える。更に、長手方向における縦断面がテーパー状の係止部材は楔作用を発生し、回動アームとハウジングとを相対回転不能に固定する。係止部材は円周方向に複数本設けられている。
(もっと読む)
支持装置
【課題】荷重を受けた場合に、支持する複数箇所にて確実に分散することができると共に、それぞれの支持箇所の耐荷重に応じて適切な荷重の分散を容易にできる支持装置を提供する。
【解決手段】第一部位21に荷重Pを受け得る荷重受体20と、荷重受体20の第二部位22を非弾性体により支持する第一回転支持体31と、荷重受体20のうち第二部位22より第一部位21側に位置する第三部位23を弾性体により支持し、第一部位21に受ける荷重Pが無荷重の場合において荷重受体20が受け得る荷重Pの方向に予圧縮または予引張を付与した状態に設けられる弾性支持体40を備える。弾性支持体40による予圧縮または予引張の力F0は、荷重受体20の第一部位21に荷重Pを受けることによって弾性支持体40に生じる荷重F1より大きな力に設定される。
(もっと読む)
関節駆動機構
【課題】低剛性から高剛性まで幅広く関節剛性を調整する。
【解決手段】ベース部材6に対してリンク部5が揺動軸心La回りに揺動可能に連結されている。ベース部材6には駆動プーリ2Aが設けられている。リンク部5には一対の従動プーリ81,82が設けられている。紐状弾性部材1は、その中央部1aが駆動プーリ2Aに架けられ、各端部1b,1cが各従動プーリ81,82に架けられている。紐状弾性部材1の両端部1b,1cは、調整機構31の剛性調整用駆動プーリ2Bに巻き取られて駆動プーリ2A側に引っ張られ、剛性調整用駆動プーリ2Bを回転駆動することで、紐状弾性部材1の駆動プーリ2Aと各従動プーリ81,82との間の有効長さが調整される。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受とを有する軸受ユニットと、を備える。ハウジングの外周面には、軸方向に沿う係止溝が形成されており、回動アームのユニット装着孔には、ハウジング側の係止溝と同形状の係止溝が形成され、両係止溝の間に係止部材が配置されている。
(もっと読む)
ロボット及びその製造方法
【課題】樹脂で形成された加工精度の高い軽量なロボットアームを備えたロボットを提供する。
【解決手段】第1アーム10に連結された第1アクチュエータ20と、第1アクチュエータ20を収容する第1収容部105を有する関節フレーム100を備え、第1収容部105は、樹脂Aの硬化物により形成された基礎フレーム101と、樹脂Aの硬化物よりも高い融解温度を有する樹脂Bの硬化物により形成された第1フレーム102とを接合して構成され、第1アクチュエータ20は、第1フレーム102に固定される。
(もっと読む)
関節構造、及びその関節構造を備えたロボット
【課題】第1の部材に対する第2の部材の相対的な角度に応じて、伝動ベルトのテンションが増減する技術を提供する。
【解決手段】第1実施形態に係る関節構造Jは、関節軸Cを有する体幹部2と、体幹部2の関節軸C回りに回転可能となるように体幹部2によって支持される上腕部5と、体幹部2に回転可能に設けられ、肩関節駆動モータ34(駆動源)によって回転駆動される駆動プーリ11と、上腕部5に回転不能に設けられる従動プーリ12と、駆動プーリ11と従動プーリ12の間に掛けられる平ベルト13(伝動ベルト)と、を備えている。従動プーリ12の外周12aは略円形である。従動プーリ12の中心軸Dは、関節軸Cからずれている。
(もっと読む)
駆動装置
【課題】変形可能な変形機械要素を介して動力が伝達される装置における、変形機械要素の変形量を高精度に取得する。
【解決手段】回転子20と結合された第1アーム1と、固定子10と結合された第2アーム2と、固定子10と第2アーム2の間に設けられた弾性部材30と、回転子20に設けられたエンコーダ板Eと、固定子10に設けられ、エンコーダ板Eの符号を検出する第1フォトセンサS1と、第2アーム2に設けられたエンコーダ板Eの符号を検出する第2フォトセンサS2とを備えて、駆動装置を構成する。
(もっと読む)
アーム装置
【課題】積極的に入力トルクと出力リンクの比を変化させ得るアーム装置を提供する。
【解決手段】アーム装置10であって、第一アーム1と、第一アーム1に対して第一軸11aを中心に回転可能に連結される第二アーム2と、第二アーム2に対して第二軸12aを中心に回転可能に連結されるリンク3と、リンク3に対して第三軸13aを中心に回転可能に連結されかつ第一アーム1に対して第四軸14aを中心に回転可能に連結されかつ第三軸13aと第四軸14aとの連結距離を伸縮可能に連結する入力機構4と、第三軸13aと第四軸14aとの連結距離20を伸縮させ得る伸縮源9と、第一アーム1に対して入力機構4を回転させることで第二アーム2を第一アーム1に対して回転させ得る動力源18とを有する。
(もっと読む)
アーム装置
【課題】所望の出力トルクを得ることができかつアーム装置において好適な構成を備えるアーム装置を提供する。
【解決手段】
アーム装置10であって、第一アーム1と、第一アーム1の下部1aに回転可能に連結される関節部2aと関節部2aから延出する本体部2bと関節部2aに対して本体部2bの反対側に延出する作用部2cとを一体に備える第二アーム2と、作用部2cに回転可能に連結されかつ上方に延出するリンク3と、リンク3の上部に回転可能に連結される第二連結部6bと第一アーム1に回転可能に連結される第一連結部5aとを備えかつ二つの連結部5a,6bの距離を伸縮可能に連結する入力機構4と、入力機構4を第一アーム1に対して回転させることで第二アーム2を第一アーム1に対して回転させる動力源18とを有する。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム3及び回動アーム4の端部同士を連結し、端部を支点として前記回動アーム4を回動させるマニピュレータ用関節部6である。マニピュレータ用関節部6は、基部アーム3の端部に設けられたスリーブ15と回動アーム4の端部に設けられた装着孔22との間に配置され、回動アーム4をスリーブ15に対して回転自在に支持する転がり軸受12、13と、回動アーム4にスリーブ15回りの回動を伝達する駆動ワイヤ10と、を有する。
(もっと読む)
回転ダンパーおよびそれを具えるロボット関節駆動装置
【課題】小出力化した柔構造のロボットの関節に用いても、ロボットの通常作動を妨げずに作動停止時の駆動トルクの変動による振動を速やかに減衰させ、作業のタスクタイムを短縮することができる回転ダンパーを提供することにある。
【解決手段】基部材と、前記基部材に対し所定軸線周りに回転可能に配置された回転部材と、前記基部材と前記回転部材との少なくとも一方に固設されるとともに他方へ向けて押圧されて前記他方に摺接し、前記基部材に対する前記回転部材の相対回転に摩擦制動力を与える摩擦部材と、前記摩擦部材に前記他方へ向けて押圧力を加える押圧手段と、前記回転部材の回転速度が上がると前記摩擦部材に加わる押圧力を減少させる押圧力変更手段と、を具えてなる回転ダンパーである。
(もっと読む)
ロボットアーム及び搬送装置
【課題】ロボットアームを構成する部材に、高いアライメント精度を要求することなく、その動作を実現することができるロボットアーム及びこれを用いた搬送装置を提供すること。
【解決手段】ガイド機構10は、上述のガイド軸15と、これらガイド軸15の動きをガイドする部材としてガイドプレート16とを備えている。ガイドプレート16には、ガイド軸15が挿通されるガイド穴17aを形成するためのガイド穴形成部材17が固定されている。ガイド穴17aは、一方向であるX軸方向に長い形状に形成され、ガイドプレート16をベースとしてガイド軸15がX軸方向に移動するようにそれの動きをガイドする。軸受ローラ18の外周面18aと、ガイド穴形成部材17の内側壁17bとの間には隙間Qが設けられている。これにより、実質的に重力方向でガイド軸15の自由度を維持でき、ガイド軸15及び軸受ローラ18のY軸方向の動きの自由度も確保される。
(もっと読む)
多関節型アーム装置及びステージ装置並びに露光装置
【課題】生産性の低下や露光処理等への悪影響を抑制する。
【解決手段】一対の接続部材AM11、AM12を所定の軸周りに回転自在に接続する関節部JT12を有する。関節部は、一対の接続部材を非接触で、所定の軸周り方向に相対的に回転自在、且つ所定の軸と直交する方向への相対移動を拘束するベアリング装置BR12を有する。
(もっと読む)
ロボットアーム
【課題】均一で安定した予圧を付与することが可能で、軸受の長寿命化が可能なロボットアームを提供する。
【解決手段】リンク機構を用いたロボットアーム10であって、スリーブ41とハウジング42との間に転がり軸受43が設けられた転がり軸受ユニット40が関節部15に使用される。
(もっと読む)
二部材の連結構造
【課題】ロボットの関節に連結されている第2部材のピン支持孔にピンの端部を圧入した後、薄肉円筒部を外径方向に変形させることにより、薄肉円筒部がロボットの関節に連結されている第2部材のピン支持孔に密着する。ロボットの関節に締結されている部材にピン端を溶接することなく確実に固定することができる。
【解決手段】互いに相対回転可能に連結された第2部材と、及び第2部材を挿通するピンとを有する二部材連結構造において、第2部材にはピンの少なくとも一端に形成された拡径部と係合するピン支持孔が形成されていることを特徴とする二部材連結構造体。
(もっと読む)
ロボット、2足歩行ロボット及びこれらの制御方法
【課題】ガタの存在により姿勢が不安定になることを解消可能なロボットを提供する。
【解決手段】2足歩行ロボット1は、大腿リンク6と下腿リンク8とは膝関節部7を介して連結され、大腿リンク6に対して下腿リンク8を揺動駆動する直動アクチュエータ11と、下腿リンク8の動作に減衰力を付与するMRダンパー12を備える。直動アクチュエータ11による下腿リンク8の揺動動作中に、下腿リンク8に作用する力の方向が変わるとき、MRダンパー12に減衰力を発生させる。
(もっと読む)
平面ねじりばね
【課題】小さな幅で、より大きな強度とたわみを提供できる、ロボットアーム用ねじりばねを提供すること。
【解決手段】ねじりばねは内側取付けセグメントを備える。外側取付けセグメントが内側取付けセグメントの周りに同心で配置される。複数の細長い薄板が、内側取付けセグメントから外側取付けセグメントへ延びる。各細長い薄板の少なくとも一部分が、内側取付けセグメントの周りに概して環状に延びる。
(もっと読む)
ロボットハンド
【課題】簡素な構成でフィンガーが指根元から指先にかけて順に曲がる動作を実現する。
【解決手段】ロボットハンド1は、モータ31からの回転動力が入力される遊星歯車ユニット44と、遊星歯車ユニット44から出力される回転動力が伝達される第1及び第2駆動軸3,4と、第1及び第2駆動軸3,4に夫々駆動される第1及び第2関節9、12を有するフィンガーF1,F2と、を備え、遊星歯車ユニット44は、太陽歯車65と、太陽歯車65の外歯に噛み合う遊星歯車66と、遊星歯車66の公転に連動するように遊星歯車66に接続された遊星腕68と、遊星歯車66の自転に連動するように遊星歯車66の外歯に噛み合う内歯歯車67とを有し、太陽歯車65がモータ31に接続され、遊星腕68が第1駆動軸3に接続され、内歯歯車67が第2駆動軸4に接続され、内歯歯車67の運動抵抗を遊星腕68の運動抵抗よりも大きくする抵抗発生手段が設けられている。
(もっと読む)
1 - 20 / 44
[ Back to top ]