
Fターム[3C007CX05]の内容
マニピュレータ、ロボット (46,145) | 関節 (545) | 関節部にロック機構を設けるもの (40)
Fターム[3C007CX05]に分類される特許
1 - 20 / 40
産業用ロボット
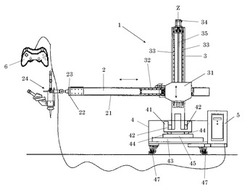
【課題】産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1が、アーム2と、アームを支えることが可能な柱部材3と、柱部材の土台4とを備える産業用ロボットであって、アームは、柱部材に対して、アーム先端部22からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラ6を備えていることからなる。
(もっと読む)
術具及びその術具を有する手術支援システム

【課題】より正確に術具の寿命をコントロール可能な術具及びその術具を有する手術支援システムを提供すること。
【解決手段】術具先端部200の内部に、術具先端部200が位置決めアーム部100に装着されたときに通電されるタイマ201を設ける。このタイマ201は、位置決めアーム部100によって通電されたときに術具先端部200の使用時間又は動作回数をカウントする。タイマ201のカウントの結果、術具先端部200が寿命に達した場合にはロック機構201aが動作して術具の動作がロックされる。
(もっと読む)
作業用器具
【課題】先端部において回動支持される工具を、手元の操作によって所望の角度位置で固定して、所要の作業を確実に行えるようにする。
【解決手段】筒状の操作棒2と、該操作棒2の先端部2aに同一軸線上に配置されるとともに、作業に使用される工具6が直接又は間接的に接続される接続体3と、操作棒2の先端部2bおよび接続体3の基端部3aが互いに離間する方向に付勢された状態で、操作棒2および接続体3を相対回動自在に連結する連結部4と、相対回動する操作棒2および接続体3を所望の角度位置で固定する位置固定操作、該位置固定を解除する解除操作が手元で行えるように構成される操作機構部5とを備える。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 入力部材14に対し出力部材15を、3組以上のリンク機構11を介して姿勢を変更可能に連結する。リンク機構11は、入力側および出力側の端部リンク部材11a,11cと、中央リンク部材11bとでなる。リンク機構11は、各リンク部材11a,11b,11cを直線で表現した幾何学モデルが、中央リンク部材11bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。3組以上のリンク機構11のすべてに、入力部材14に対して出力部材15を任意の姿勢で静止させることが可能な静止機構4を設ける。また、入力部材14および出力部材15にそれぞれ形成された被接触部に接触して入力部材14と出力部材15とを互いに連結する構造体5を設ける。
(もっと読む)
ロボット用ハンドユニットおよびロボット
【課題】指部の複数の姿勢において、関節駆動部に対する負荷を軽減することが可能なロボット用ハンドユニットを提供する。
【解決手段】このハンドユニット1(ロボット用ハンドユニット)は、根元リンク部124および中間リンク部125と、中間リンク部125を根元リンク部124に対して相対的に回動させる関節駆動部122と、中間リンク部125の根元リンク部124に対する複数の回動位置において、作業対象を把持する際に根元リンク部124に対して係合することによって中間リンク部125が根元リンク部124に対して相対的に回動するのを規制するストッパ部16とを含む人差し指部12を備える。
(もっと読む)
ロボット及びその製造方法
【課題】樹脂で形成された加工精度の高い軽量なロボットアームを備えたロボットを提供する。
【解決手段】第1アーム10に連結された第1アクチュエータ20と、第1アクチュエータ20を収容する第1収容部105を有する関節フレーム100を備え、第1収容部105は、樹脂Aの硬化物により形成された基礎フレーム101と、樹脂Aの硬化物よりも高い融解温度を有する樹脂Bの硬化物により形成された第1フレーム102とを接合して構成され、第1アクチュエータ20は、第1フレーム102に固定される。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
多関節ロボット
【課題】アクチュエータ間の配線の絡みを防止することで電気配線の設置の好適化を図り、その上でしかも多関節ロボットの小型化を実現する。
【解決手段】関節アクチュエータ10は、モータモジュール11と、このモータモジュール11に組み付けられる配線ユニット13とを備えている。モータモジュール11の軸方向両端にはそれぞれトップカバー12とエンドカバー14とが設けられており、これらトップカバー12とエンドカバー14とに配線ユニット13のコネクタ83,84がそれぞれ取り付けられている。配線ユニット13のFPCケーブル82はモータハウジング27の外周に周回させて設けられている。また、配線ユニット13はモータハウジング27を回転軸として回転する筒体73を備えており、筒体73にFPCケーブル82が固定されている。
(もっと読む)
駆動源ユニット、及びロボット
【課題】ブレーキとモーターとを配置するために必要な体積を抑制して、モーター及びブレーキを収容するために必要なアームの大きさが増大することを抑制することができる駆動源ユニット、及びロボットを提供する。
【解決手段】中心軸まわりに回動する出力軸を備える駆動源と、出力軸に係合しており、出力軸と略一体に、中心軸まわりに回動する出力部材と、出力軸の軸方向において駆動源と並べて配設されており、出力軸の回動を制動することが可能な制動手段と、を備え、出力部材と制動手段とは、出力軸の軸方向において、少なくとも一部分が、同じ位置に配設されている。
(もっと読む)
アーム装置
【課題】容易かつ迅速に対象物を任意の空間位置で固定することのできるアーム装置を提供する。
【解決手段】着脱自在に取り付けられた対象物Oを任意の空間位置で固定するためのアーム装置1であって、基台2に設けられた第1の関節機構3と、基端部41が前記第1の関節機構3によって継合され、当該第1の関節機構3によって軸回りの回動と角度の変位とこれらの動作のロックとが行われ、先端部42に前記対象物Oを着脱自在に取り付ける対象物着脱手段6を備えるアーム部4と、前記基端部41と前記先端部42との間に、前記アーム部4の軸回りの回動と角度の変位とこれらの動作のロックとを行う少なくとも1つの第2の関節機構5と、を有し、第1の関節機構3および第2の関節機構5はともに、伸縮する軸部材71の伸縮に応じて縮径および拡径するように固定されたボール部72を有するボールジョイント74であることを特徴とする。
(もっと読む)
ロボット用ロックシステム及びそのロック方法
【課題】システムに通電していない状態で、関節部分を自由に固定、及び解放できるロックシステム及びそのロック方法を提供すること。
【解決手段】本発明にかかるロックシステムは、モータが通電していない際に、モータにより駆動する駆動軸の回転を固定する。少なくとも2以上の方向から駆動軸を挟む2以上の固定パッドと、固定パッドを、内部の空気圧を変化させることにより、駆動軸の中心方向に移動させるシリンダー部と、シリンダー部に空気を挿入する第1の挿入口と、排出する排出口とを有し、固定パッドは、駆動軸側とは反対側の端部がばねの一端と接続され、ばねの他端はシリンダー部と接続され、シリンダー部は、シリンダー内の空気圧を上げることで、固定パッドを駆動軸の中心方向に押し出し、シリンダー内部の空気圧を下げることで、ばねの弾性力により、固定パッドを駆動軸側とは反対の方向に移動させる。
(もっと読む)
回転ダンパーおよびそれを具えるロボット関節駆動装置
【課題】小出力化した柔構造のロボットの関節に用いても、ロボットの通常作動を妨げずに作動停止時の駆動トルクの変動による振動を速やかに減衰させ、作業のタスクタイムを短縮することができる回転ダンパーを提供することにある。
【解決手段】基部材と、前記基部材に対し所定軸線周りに回転可能に配置された回転部材と、前記基部材と前記回転部材との少なくとも一方に固設されるとともに他方へ向けて押圧されて前記他方に摺接し、前記基部材に対する前記回転部材の相対回転に摩擦制動力を与える摩擦部材と、前記摩擦部材に前記他方へ向けて押圧力を加える押圧手段と、前記回転部材の回転速度が上がると前記摩擦部材に加わる押圧力を減少させる押圧力変更手段と、を具えてなる回転ダンパーである。
(もっと読む)
ロボットの電磁ブレーキ制御装置
【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。
(もっと読む)
ロータリ直列型弾性アクチュエータ
【課題】器用な人間型ロボット用の上腕アセンブリを作動させるためのロータリアクチュエータアセンブリを提供すること。
【解決手段】人間型ロボットのための上腕アセンブリは、それぞれが軸を画定する複数の腕サポートフレームを備える。複数のロータリアクチュエータアセンブリがそれぞれ、各軸を中心として複数の腕サポートフレームの中の1つに設置される。各ロータリアクチュエータアセンブリは、各軸を中心として設置されたモータと、モータに回転可能に連結されたギアドライブと、ねじりばねとを備える。ねじりばねは、ギアドライブの出力部に回転可能に連結されたばね入力部と、関節のための出力部に連結されたばね出力部とを有する。
(もっと読む)
保持ブレーキ装置とこれを用いたアクチュエータ及びロボット装置
【課題】 非常停電時に保持ブレーキの回転を確実に阻止することができる保持ブレーキ装置を提供する。
【解決手段】 電動機への通電が遮断した場合に作動して電動機シャフトを拘束する負作動ブレーキであって、回転ディスク(8)と、前記回転ディスク(8)に隣接するアーマチェア(5)と、前記アーマチェア(5)をサイドプレート(7)へ押す第1のバネ(4)と、前記アーマチェア(5)を駆動する第1のコイル(3)とヨーク(2)を備えた保持ブレーキ装置(1)において、前記アーマチェア(5)に凹凸部を備え、前記凹凸部に噛み合う凹凸部を備えたブロック(14)を前記回転ディスク(8)上に備えたことを特徴とする保持ブレーキ装置。
(もっと読む)
旋回関節機構及びその制御方法
【課題】ベルト破断時の出力軸の落下を防止することができる旋回関節機構を提供する。
【解決手段】本発明に係る旋回関節機構の一態様は、出力軸12と、モータ1の動力を出力軸12に伝達する伝達部材(例えば、ベルト2)と、作動状態において出力軸12を保持するブレーキ5と、伝達部材の破断を検出し、検出信号Sdを出力するセンサ6と、センサ6から出力された検出信号Sに基づきブレーキに対して当該ブレーキを作動状態に設定する制御信号を出力するブレーキ駆動装置と、を備える。
(もっと読む)
ロボット関節およびトルク伝達力可変装置
【課題】小型であっても変位量を大きく確保でき、ロボットが人間に接触したときに、接触した人間に対して実際の人間に接触したときと同様に柔らかい動きの感覚を与えることができるロボット関節を提供する。
【解決手段】アクチュエータ30は、電気エネルギーを受けた場合に変形する電歪エラストマー37と、電歪エラストマー37に取り付けられ、電歪エラストマー37の形状に応じて出力部材20に対して接触状態と離間状態とを切り替えるシュー38を備える。トルク制御部40は、電歪エラストマー37に電気エネルギーを与えることにより、基部材10から出力部材20へ伝達するトルクを制御する。さらに、シュー38が出力部材20に接触している状態において、出力部材20が外部から所定トルク以上のトルクを受けた場合に、シュー38が出力部材20に対して擦りながら、出力部材20が基部材10に対して回転する。
(もっと読む)
産業用ロボット
【課題】大きな搬送対象物や高価な搬送対象物の搬送に適した産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、上下駆動機構を停止させるための2個のブレーキ機構24を備え、制御部80は、2個のブレーキ機構24を制御するブレーキ制御部84を備えている。ブレーキ制御部84は、2個のブレーキ機構24を段階的に作動させる。
(もっと読む)
産業用ロボット
【課題】大型化する搬送対象物を搬送する場合であっても、小型化が可能で、かつ、コストを低減することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、2台の駆動用モータ20を備え、制御部80は、2台の駆動用モータ20を制御するモータ制御部81を備えている。モータ制御部81は、一方の駆動用モータ20と、他方の駆動用モータ20とを個別に制御している。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置を用いてワークを搬送する際にワークが破損することを防止しつつ、パワーアシスト装置によるワークの搬送効率を改善するために、搬送途中においてワークの姿勢を容易に安定させることができるパワーアシスト装置およびその制御方法を提供する。
【解決手段】制御装置5は、角度センサ7により検出するフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転角度θが、予め定めた下限角度θL以下である場合か、または、予め定めた上限角度θH以上である場合には、ブレーキ機構4aの解除状態を維持してフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転を規制しないように制御する。
(もっと読む)
1 - 20 / 40
[ Back to top ]