
Fターム[3C007CY11]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 位置決め機構を有するもの (118)
Fターム[3C007CY11]の下位に属するFターム
ON−OFFスイッチ (12)
当て止めするもの (93)
Fターム[3C007CY11]に分類される特許
1 - 13 / 13
ロボット設置構造
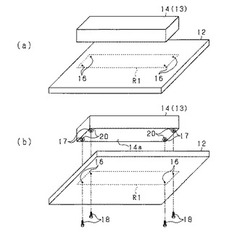
【課題】作業者の技量に関係なく、ロボットの設置作業を効率よく実施する。
【解決手段】架台は、平板状をなすステージ12を備えており、そのステージ12の上面側にロボット13が設置されている。ロボット13は、ステージ12上に載置された状態で、ステージ下面側から複数のネジ18により固定される。ステージ12には上下に貫通する貫通孔16が設けられている。ロボット底面部には、基準位置としてのネジ孔17が設けられているとともに、マーキングシート20が貼り付けられている。マーキングシート20には、そのネジ孔17に対する方向情報と同ネジ孔17までの離間距離情報とが付与されたマーキングが付されている。
(もっと読む)
搬送装置、基板処理システム及び姿勢制御機構

【課題】保持台の姿勢を正確に制御することができ、また高速で移動させても保持台がふらつくことがない搬送装置を提供する。
【解決手段】搬送装置に、第一の姿勢保持リンク56、及び第二の姿勢保持リンク57を設ける。第一の姿勢保持リンク56の一端と第二の姿勢保持リンク57の一端とは連結軸53によって回転可能に連結される。保持台21の基部プレート27にレール51,52を取り付ける。連結軸53にローラ54,55を所定の軸線の回りを回転可能に取り付ける。ローラ54,55はレール51,52のローラ転走部51a,52aに接触するように配置される。保持台21を移動させるとき、ローラ54,55がローラ転走部51a,52aを転がり運動する。
(もっと読む)
ロボット安全柵用搬入搬出装置及び台車搬入搬出装置
【課題】ロボットが稼働する安全柵内に物品さらには台車を安全確実に搬入搬出するための回転テーブル装置を提供。
【解決手段】作業エリア2を囲む開口部4を有する安全柵3と、開口部に設けられ積載エリアA,Bを有する回転テーブル5と、回転テーブルを分割する仕切壁7と、を設け、所定位置で仕切壁が開口部を閉塞するようにして、安全柵全体を形成した。台車20を載置可能にし、回転テーブル上に台車を固定する第一の固定部40と、仕切壁に台車の上部を固定する第二の固定部90を設ける。第一の固定部は、台車底部24を底部導入部41cから底部受け部41a,41bに導入し、台車の背面側枠61側梁38に係止爪42aで固定する。第二の固定部は、台車左右側枠の支持棒64及び固定棒93により仕切壁に固定する。
(もっと読む)
真空吸着パッドセッティング装置における定置板の傾斜角度設定装置
【課題】真空吸着パッドをワークの形状に合う様に傾斜角度を設定できる装置を提供する。
【解決手段】移動盤1上に2つのモータ102・202を水平面内で直交配置し、第1モータの出力軸に左右に同じ長さの第1アーム103を固設し、第2モータの出力軸に左右に同じ長さの第2アーム203を固設し、第1アームの両端部に第1リンク105a,bを枢着し、第2アームの両端部に第2リンク201を枢着し、真空吸着パッドが載置される定置板300を備え、定置板を回転自在に支持する支持ビームを定置板の下側に横断状に設け、支持ビームの両端部に第1自在継手107a,bを設け、第1リンクの上端部を該第1自在継手を介して該支持ビームに連結するとともに、定置板の外周縁であって支持ビームと直交する一直線上に突腕部307a,bを突設し、該各突腕部に第2自在継手207a,bを設け、第2リンクの上端部を第2自在継手を介して定置板に連結する。
(もっと読む)
加工システム
【課題】搬送レール等の軌道部材を用いることなく床面に設定した走行経路を搬送装置に走行させる無軌道型搬送システムを用いるとともに、走行経路に沿って配置された各工作機械に対する搬送装置の位置を、より高精度に位置決めすることが可能な加工システムを提供する。
【解決手段】搬送装置20は、走行経路R1に沿って床面F上にて走行及び停止可能な台車21と、ワークWの搬入または搬出を行うロボット22と、工作機械MCnに設けられた被連結手段CM(または連結手段CA)と連結可能な連結手段CA(または被連結手段CM)とを備え、工作機械には、自己の搬入・搬出位置に到達した搬送装置の連結手段と連結可能な位置に被連結手段が設けられており、搬送装置は、任意の工作機械の搬入・搬出位置に到達すると、連結手段と被連結手段を連結し、工作機械に対するロボットの相対位置及び相対方向を補正した後、ワークの搬入またはワークの搬出を行う。
(もっと読む)
ロボットアームの姿勢保持構造
【課題】ブレーキ機構や減速機構を備えていない関節部の姿勢を保持不能な小型駆動手段を採用しつつ、関節部の姿勢保持が可能なロボットアームの姿勢保持構造を提供する。
【解決手段】一方のアーム部16,18に対して上下方向へ回転し得るよう他方のアーム部18,20が連結された関節部24,26を備えたロボットアームにおいて、関節部24,26は、通電時には両アーム部16,18/18,20の相対位置を保持可能で、非通電時には両アーム部16,18/18,20の相対位置を保持不能な小型駆動手段34により駆動すると共に、関節部22,24,26を構成する両アーム部16,18/18,20は、駆動手段34による両アーム部16,18/18,20の姿勢変化に伴って可撓変形すると共に駆動手段34への通電停止時では当該通電停止時での姿勢を維持する可撓性部材32で連結するよう構成した。
(もっと読む)
ウェーハ搬送装置
【課題】ミニエンバイロメント装置のクリーンボックス内に、クリーンエアの好適なダウンフローを形成できる、ウェーハ搬送装置を提供することを課題とする。
【解決手段】半導体ウェーハ4bを加工するミニエンバイロメント装置1に備わるクリーンボックス2の背面の側の側壁部23bにロボット本体20の走行装置21を備え、ロボット本体20を走行させることで、クリーンボックス2の床部23aに、ロボット本体20が走行する軌道を設置することなく、ロボット本体20を走行できる構成とする。
(もっと読む)
車輪位置決め機構
【課題】 本発明は、走行型ロボットに対する車輪位置決め機構に関し、より詳細には走行型ロボットの駆動輪に当接して走行型ロボットの進入方向および左右の位置ずれを自動修正する車輪位置決め機構に関する。
【解決手段】 本発明の車輪位置決め機構は、走行型ロボットの駆動輪の間隔に合わせて所定形状の2個の穴が形成された位置決め台と、フラットローラとテーパローラとを配置した2連ローラとを有し、2連ローラは位置決め台の穴に回転軸を相対して配置され、2連ローラの上部は位置決め台の上面から所定高さ露出して駆動輪に当接して回転可能とし、テーパローラは位置決め台の外側に対して大きいローラ径となる向きに配置され、さらにフラットローラに対して走行型ロボットの進入側に配置する、よう構成する。
(もっと読む)
ワーク移送装置
【課題】特に高さに制約がある加工機に対し、ワークの搬送、装填、取り出しを容易に達成できるようにした、ワーク移送装置を提供する。
【解決手段】第1案内枠12aと第2案内枠12bに沿って、それぞれ往復動可能に介装した第1、第2スライダ13、14を介して取付けたアーム17を、第1、第2スライダ13、14に連結した第1シリンダ15と第2シリンダ16により、傾斜移動させ、アーム他端側の把持手段20をプレス装置1に干渉しないように、楕円曲線を描くように把持したワークWを搬送させ、待機位置から加工位置に移載し、且つ取出し位置に移載する。
(もっと読む)
レーザ加工ロボット
【課題】 大出力のレーザ発振器を用いて高速でかつ高精度でレーザ加工をおこなうことができ、被加工物や治具等との干渉が少ないレーザ加工ロボットを提供する。
【解決手段】 垂直多関節形ロボット1の第3軸J3により駆動されるアーム10の先端部に、第3軸J3の軸線に対して直角方向に延びる第4軸線S4とこの第4軸線に直交する第5軸線S5の回りに2つの回転自由度を有し先端に集光部24をそなえた手首部20であって、第4軸線S4に沿って入射したレーザビームを第5軸線S5上に設けた2つのベンドミラー25,26により第5軸線S5を経て集光部24へ偏向するレーザビーム伝送路を内部にそなえてなる手首部の基部20aを、取付けるとともに、手首部の基部20aに向って第4軸線S4と同軸状にレーザビームを出力するレーザ発振器30を、アーム10に搭載した。
(もっと読む)
ワーク搬送装置
【課題】昇降用の駆動手段および回動動作用の駆動手段といったように、大きく重量大な駆動手段を2種類も備えなくて済み、小型で軽量に構成することができるワーク搬送装置を提供する。
【解決手段】ワークとなるウィンドウ5を把持する把持具20と、把持具20を移動可能に支持する支持アーム10とを備え、把持具20にて把持したウィンドウ5を支持アーム10によりウィンドウ5が組み付けられるウィンドウ枠7a・枠7bまで搬送するとともに、ウィンドウ5の姿勢をウィンドウ枠7a・7bに応じた姿勢に変更するワーク搬送装置1であって、支持アーム10を、複数のリンク11・12・13・14が閉ループ状に接続される閉ループリンク機構に構成し、支持アーム10の把持具20に接続される一対のリンク13・14のうち、何れか一方のリンク13・14に対する把持具20の姿勢を固定可能に構成する。
(もっと読む)
回転リミット装置
【課題】 可動範囲をできるだけ広げつつ、小型軽量化も可能な回転リミット装置を提供する。
【解決手段】 回転リミット装置10は、ストッパ部材1を有する固定部2と、ストッパ部材1に接触可能な突起部材3を有し左右に任意に回転可能な自由回転部4と、突起部材3が係合される円弧状のスリット5が形成された回転部6とを備えている。回転部6のスリット5長で決まる回転角度よりも大きい角度まで回転できるように、回転部6と固定部2の間に配置される自由回転部4に突起部材3を設けるとともに、固定部2にストッパ部材1を設けるため、回転部6の外側に可動式のストッパを設けずに回転リミット装置10の可動範囲を広げることができる。
(もっと読む)
産業用ロボット
【課題】 フォークが長くても、これを太くすることなく、フォークの先端の垂れ下がりを補正して搬送物を容易、迅速かつ的確に搬送することのできる産業用ロボットを提供する。
【解決手段】 フォーク16は、ボルト17によりハンド15に着脱可能に取り付けられている。ハンド15には、フォーク16の下面に当接してフォーク16の先端側を押し上げるようにシム21とシム押さえ22とからなるフォーク先端位置調整手段20が取り付けられている。このシム21は、予め種々の厚さのものが用意され、フォーク16の先端が元端とほぼ同じ高さとなる厚さのものが選択されて使用される。
(もっと読む)
1 - 13 / 13
[ Back to top ]