
Fターム[3C007CY13]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 位置決め機構を有するもの (118) | 当て止めするもの (93)
Fターム[3C007CY13]に分類される特許
1 - 20 / 93
基板移載装置
【課題】ベルヌーイチャックで吸引保持した基板を、規制体で所定姿勢に位置保持する基板移載装置において、規制体の規制機能の回復をより少ない手間で簡便に行うことができるようにする。
【解決手段】基板Wの表面に平行な方向の滑り移動を規制するガイド53をガイド取付部材51に対して着脱自在に構成する。これにより、規制体50の全体の交換を要することなく、ガイド53のみを交換するだけで、規制体50の規制機能を回復することができる。従って、規制体50の全体を交換する形態に比べて、規制体50の規制機能の回復に要する費用や手間を抑えることができる。
(もっと読む)
搬送ロボット

【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
関節装置
【課題】ロボットの関節装置において、第1連結部と第2連結部の相対回転角度を規制する機構を持ちながらも、360゜を超える相対回転角度を実現する。
【解決手段】第1連結部1と第2連結部2を軸受部を介して連結し、第1連結部1に設けられた第1ストッパーピン6と、第2連結部2に設けられた第2ストッパーピン8と、第2連結部2と同心でフリーに回転可能な中間リング7と、を備え、中間リング7は、第1ストッパーピン6に対して第1回転角度(θ1)だけ回転可能にする突出部7dと、第2ストッパーピン8に対して第2回転角度(θ2)だけ回転可能にする凹部7dと、を備え、突出部7dと凹部7eのいずれか一方により、それ以上の回転が規制された後も、突出部7dと凹部7eのいずれか他方により回転が規制されるまで、第1連結部1と第2連結部2の相対回転角度を最大で、(θ1+θ2)まで許容する。
(もっと読む)
回転リミット装置の消音装置
【課題】二つの回転体の動作を不安定にすることなく、ストッパ部材の衝突音を効果的に減少させる回転リミット装置の消音装置を提供すること。
【解決手段】消音装置は、第1ガイド溝11及び第2ガイド溝12の停止位置11A,11B,12A,12Bの、ストッパ部材21の移動方向と平行な溝側面に突設されて、ストッパ部材21が第1ガイド溝11あるいは第2ガイド溝12の溝端面に衝突するとき、ストッパ部材21の移動方向に平行な面に接触してストッパ部材21の運動エネルギーを減衰させる緩衝部材31を含んでいる。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
ロボット用回転関節における回転の機械的制限
【課題】機構の複雑化・大型化や周囲との干渉、美観の低下を抑制しつつ、許容回転角度の範囲が広い範囲に設定されたロボット用回転関節における回転を機械的に制限する。
【解決手段】ロボット用回転関節は、フレームと、フレームの内部に配置され中心軸回りに回転する略円柱形状の回転軸体と、回転軸体の回転を機械的に制限するメカニカルストッパと、を備える。メカニカルストッパは、穴を有すると共に、フレームにおける回転軸体の側面に対向する位置に固定されたフックと、両端が回転軸体の側面に固定されたワイヤであって、フックの穴を一度通ると共に、回転軸体の側面に沿って巻き付けられたワイヤと、を含む。
(もっと読む)
ロボット用ハンドユニットおよびロボット
【課題】指部の複数の姿勢において、関節駆動部に対する負荷を軽減することが可能なロボット用ハンドユニットを提供する。
【解決手段】このハンドユニット1(ロボット用ハンドユニット)は、根元リンク部124および中間リンク部125と、中間リンク部125を根元リンク部124に対して相対的に回動させる関節駆動部122と、中間リンク部125の根元リンク部124に対する複数の回動位置において、作業対象を把持する際に根元リンク部124に対して係合することによって中間リンク部125が根元リンク部124に対して相対的に回動するのを規制するストッパ部16とを含む人差し指部12を備える。
(もっと読む)
ロボットの回転規制装置
【課題】狭いスペースに配設することができ、しかも、回転リンクの回転動作範囲を360度を超える角度に規制することも可能なロボットの回転規制装置を提供する。
【解決手段】手首アームのフレームの先端開口部を塞ぐ蓋部材に環状の収納空間30を形成し、この収納空間30内に両端を径小側内面壁30aと径大側内面壁30bに連結したフレキシブルバンド29を収容すると共に、フランジ(回転リンク)と一体に回転する掛合ピン41を挿入する。フランジが許容角度範囲を超えて回転しようとすると、掛合ピン41に引っ掛けられて径小側内面壁30aに巻き付けられるフレキシブルバンド29が伸び切ってフランジの回転を強制的に停止させる。
(もっと読む)
ロボットの回転規制装置
【課題】ワイヤによってリンクの回転動作範囲を規制するロボットの回転規制装置において、ワイヤをロボットの内部に収納でき、また、リンクの回転動作範囲をリンク毎に所望の角度に設定することができるようにする。
【解決手段】ワイヤ27の両端部を、一のリンクのフレーム9と、当該フレーム9の内側に位置され他のリンクが連結される回転軸13とに連結し、他のリンクの回転に伴ってワイヤ27が回転軸13に巻き取られて伸び切ることにより他のリンクの回転動作範囲を規制する。
(もっと読む)
ロボットおよび2台以上のロボットの組み立て方法
【課題】個体差を小さくすることが可能なロボットを提供する。
【解決手段】このロボット100は、アーム支持部2と、アーム支持部2に関節部を介して連結される下腕部3と、関節部に配置され、下腕部3をアーム支持部2に対して回動可能に連結し、偏心ギア77a(77b)が噛み合い位置を移動させながら回転する減速機7bと、アーム支持部2に対する下腕部3の相対的な回転位置が所定の位置にあるとき、減速機7bの回転角度位置が所定の回転角度位置となるように位置合わせ可能な位置決め部21b、71d、72eおよび3bとを備える。
(もっと読む)
制御装置、産業用ロボット、座標系の再現方法、及びプログラム
【課題】座標系を設定した後にその座標系の設定に用いた基準位置データが消失した場合にも、容易にその座標系を再現することを可能にする。
【解決手段】制御装置10が、基準位置データを記憶するための基準値記憶部10aと、制御対象の所定の運動軸を所定の位置に変位させた状態で位置の検出を行うことにより位置データを取得しそれを保存する基準取得部(第1基準取得部12a、第2基準取得部13a)と、上記位置データと基準位置データとに基づいて座標系を設定する第1座標系設定部12と、基準位置データに対する位置データの相対データを取得しそれを保存する相対値取得部(第1座標系設定部12)と、基準位置データが消失したか否かを判断する判断部13cと、基準位置データが消失したと判断された場合に、上記検出により位置データを取得し、その位置データと上記相対データとに基づいて、座標系を再現する第2座標系設定部13と、を備える。
(もっと読む)
食品の搬送装置
【課題】挟持部材を開操作したときの開度を、送出位置で食品を挟持するときの開度に対して払出位置で食品を払い出すときの開度が小さくなるように設定することができる食品の搬送装置を提供すること。
【解決手段】製造工程から複数個ずつ並んで送出位置Aに送出された食品Wを、挟持部材2によって一旦挟持して持ち上げ、次工程の払出位置Bに整列した状態で払い出す食品の搬送装置1において、挟持部材2を開閉操作する挟持部材操作手段3と、挟持部材操作手段3によって挟持部材2を開操作したときの挟持部材2の開度を、送出位置Aで食品Wを挟持するときの開度に対して払出位置Bで食品Wを払い出すときの開度が小さくなるように設定する挟持部材開度設定手段4とを備えるようにする。
(もっと読む)
産業用ロボット
【課題】本発明は、クリーンルームで使用可能でタクトタイムを短縮できる産業用ロボットを提供することを目的とするものである。
【解決手段】ワークを載置するハンド8と、前記ハンド8を前記ワークの所定の位置から取り出しおよび供給するアーム2と、前記アーム2と上下移動機構11が支持部材10により連結され、前記上下移動機構11の下部に台座13が設けられ、前記台座13が旋回する基台14に振り子ストッパ17が備えられたものである。
(もっと読む)
産業用ロボット
【課題】クリーンルームで使用可能でタクトタイムを短縮できる産業用ロボットを提供する。
【解決手段】ワークを載置するハンド8と、前記ハンド8を前記ワークの所定の位置から取り出しおよび供給するアーム2と、前記アーム2と上下移動機構11が支持部材10により連結され、前記上下移動機構11の下部に台座13が設けられ、前記台座13が旋回する基台14に振り子ストッパ17が備えられたものである。
(もっと読む)
チャッキング装置
【課題】異なる形状のワークに対してワンタッチで対応可能なチャッキング装置を提供する。
【解決手段】装置本体上に配設された、第一及び第二のチャック部材を有する第一支持部材並びに第三及び第四のチャック部材を有する第二支持部材と、両支持部材をY軸方向に相互に接近離間させてワークを把持、解除するよう駆動する把持駆動部材と、各チャック部材を第一の位置と第二の位置とに揺動変位させる変位駆動部材とを有し、各チャック部材がワークを把持するフィンガーを有し、第一の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に離間し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に接近し、第二の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に接近し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に離間する。
(もっと読む)
回転リミット装置
【課題】厚みや重量を抑えつつ、回転量を360度以上で制限可能な回転リミット装置を得ること。
【解決手段】本発明の回転リミット装置1は、回転軸2を中心に互いに回転可能に重ねられた第1回転体3および第2回転体5を有し、第1回転体および第2回転体の少なくとも一方に形成された内壁面10,14と、第1回転体および第2回転体の少なくとも一方に形成された外壁面11,15とにより回転軸を中心とする円形状のガイド通路18が形成され、第1回転体にはガイド通路に突出する第1突出部が形成され、第2回転体にはガイド通路に突出する第2突出部が形成され、第1突出部と第2突出部とは、互いの突出高さの和が、回転軸と平行な方向のガイド通路の寸法よりも小さくなるような高さで形成されており、ガイド通路に移動可能に収容されて、第1突出部と第2突出部とに当接することで、回転体同士の回転量を制限する回転規制体7をさらに有する。
(もっと読む)
ロボットのストッパ装置
【課題】アームの360度以上の回転範囲を確保することができると共に、回転範囲内での回転において衝突音の発生の恐れがないロボットのストッパ装置を提供する。
【解決手段】ショルダ3を支持するベース2の受け座14とショルダ3の回転基部16に180度を越える角度範囲で第1の円弧状溝19と第2の円弧状溝20を形成し、両円弧状溝19,20に跨ってボール21を配置する。ボール21には予圧を与えて第1の円弧状溝19および第2の円弧状溝20の底部に押し付けることで転動時に滑りを生じないようにする。
(もっと読む)
旋回装置
【課題】許容する旋回範囲の変更が容易であるとともに、高強度のストッパ構造を備える旋回装置を実現する。
【解決手段】旋回装置110は、ケース2と、ケース2に対して相対回転する回転部材と、ケース2に対する回転部材の旋回範囲を制限するストッパ部材108を備える。回転部材の軸線102方向に延びる複数の溝36が、回転部材の軸線102と同心の円弧に沿って並ぶように形成されている。ケース2を固定するためのボルトを通すボルト孔32が、隣接する2つの溝36を画定する突条部34の夫々に形成されている。ストッパ部材108は、その一部が溝36に嵌合するとともにケース2を固定するためのボルトによってケース2に固定されている。
(もっと読む)
段積み部品取出し装置
【課題】段積みされた部品を効率良く取出す装置を提供する。
【解決手段】平面上で位置決めできる本体と、本体に取り付けられたアクチュエータ62と、該アクチュエータ62により駆動されて上昇端位置α1と下降端位置の2ポイントの位置で上下動する上下本体63と、該上下本体63に自重で上下動できるように貫通状態で設置された自重上下軸41と、該自重上下軸41がその下降端位置にあることを検出するセンサPH1とを具備する段積み部品取出し装置において、前記自重上下軸41の上端部には、自重で下降することを停止させる自重軸ストッパ45が設けられ、前記自重上下軸41の下端部には、部品を把持するチャック21と、前記自重上下軸41を部品上面で停止させるためのストッパ51が設けられていることを特徴とする。
(もっと読む)
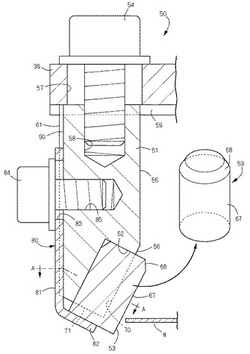
作業装置
【課題】移動機構部の先端に着脱可能なヘッド部を、空間内の目標位置に高精度に位置決めすることができる作業装置を提供する。
【解決手段】形状測定装置(作業装置)100は、形状センサ部17が内蔵されたプローブ(ヘッド部)12と、所定の空間内でプローブ12を移動させるアーム部(移動機構部)11に、このプローブ12を取り付け可能な取付部16と、空間内における所定の目標位置にプローブ12を位置決めする空間位置決定部30と、を有する。
(もっと読む)
1 - 20 / 93
[ Back to top ]