
Fターム[3C007DS05]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 複数の挟持装置又は吸着装置 (152)
Fターム[3C007DS05]の下位に属するFターム
直線配列型 (49)
平面マトリックス配置 (16)
タレット型 (35)
Fターム[3C007DS05]に分類される特許
1 - 20 / 52
ワーク搬送装置
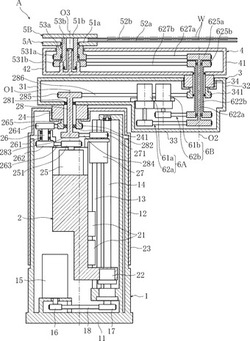
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
吸着装置及びロボットシステム

【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
産業用ロボット
【課題】搬送対象物が上下方向で重ならないように配置される第2配置位置と産業用ロボットとの間にゲート部が配置されていても、本体部に対するハンドの旋回半径を小さくしつつ、ハンドとゲート部との干渉を防止することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、第1ハンド3および第2ハンド4と、アーム5と、本体部6とを備えている。第1ハンド3の基端部と第2ハンド4の基端部とは、上下方向で重なるようにアーム5の先端部に取り付けられている。第1ハンド3と第2ハンド4とは、アーム5に対して個別に回転可能であり、かつ、上下方向から見たときにアーム5に対して共通の回転中心C1を中心にして回転可能である。また、第1ハンド3と第2ハンド4とは、上下方向から見たときに屈曲するように形成され、かつ、上下方向から見たときに回転中心C1を通過する所定の仮想線に対して略線対称に形成されている。
(もっと読む)
物体把持システム、物体把持方法、プログラム、およびロボットシステム
【課題】物体の把持を行う場合に、後工程で必要とされる物体上の把持位置または相対姿勢への変更を考慮して物体を把持する。
【解決手段】1または2以上の対象物体を撮像した画像に基づいて1または2以上の対象物体の位置姿勢を計測する位置姿勢計測部と、位置姿勢に基づいて1または2以上の把持可能な対象物体を選択する選択部と、選択された1または2以上の把持可能な対象物体から、把持位置または把持方向を含む状態ごとに予め定められた優先度に従って、最も優先度が高い状態で把持可能な対象物体を把持物体として決定する決定部と、決定された把持物体を最も優先度が高い状態で把持する把持部と、把持されている把持物体の状態を、把持物体を他の物体に対して組み付ける際の状態に変更する変更部と、を備える。
(もっと読む)
搬送ロボット
【課題】シンプルな構造で複数の種類のワークを搬送することができる搬送ロボットを提供する。
【解決手段】三次元に移動可能な移動部11を備えた搬送ロボット1である。移動部11は、第1ワーク8を把持するための第1把持部3と第2ツール4を接続するための第1接続部23とを設けた第1ツールを有しする。第2ツール4は、第1接続部23に着脱可能に係合する第2接続部43を有すると共に、第2ワーク9を把持するための第2把持部5を有する。第1接続部23と第2接続部43は鉛直方向に互いに嵌合することにより水平方向の位置決めを行う位置決め部24、44を有している。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
トレイ移載装置及び方法
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
板ガラス吸着装置
【課題】交互に挟まれた状態にある板ガラスと合紙を同時に取り出す際に、安定して両者を吸着保持でき、また、ガラス板からはみ出ている合紙端部の折れ曲がりや癖付き等に対しても確実に吸着保持できる吸着装置を提供すること。
【解決手段】板ガラスGの一方の平面側を吸着するガラス吸着パッド11と、ガラス吸着パッド11が板ガラスGを吸着する際、板ガラスGの他方の平面側に位置する合紙Pの板ガラスGの周辺からはみ出た合紙端部を、板ガラスGの一方の平面側から、板ガラスGの辺に沿って長手方向に配置され合紙端部に線状に接触する吸着開口部12aにより吸着する合紙吸着治具12とを有する。
(もっと読む)
ロボットハンド装置およびそのようなロボットハンド装置のアーム調節方法
【課題】複数種類のワークに対して柔軟な対応を行うことができる安価なロボットハンド装置を提供する。
【解決手段】ワークをハンドリングするロボットハンド装置20は、ロボット1に取付けられるハンドベース21と、ワークを把持する把持部をそれぞれが備えている少なくとも二つのアーム30a〜30cと、アームに取付けられていてアームをハンドベースに磁力で結合する磁力発生部39とを具備する。さらに、少なくとも二つのアームのうちの一つのアームを一時的に保持するアーム保持機構部50を具備してもよい。
(もっと読む)
真空発生システム
【課題】真空発生器を動作させるのに用いた圧縮空気の有効利用を図る。
【解決手段】真空発生システム1において、コンプレッサ11から吐出される圧縮空気により動作する真空発生器13の後段に真空発生器28を設け、真空発生器13と真空発生器28との間にタンク22を設ける。真空発生器13から排出された圧縮空気はタンク22に蓄積される。真空発生器28は、タンク22に蓄積された圧縮空気を用いて動作する。また、経路24により、コンプレッサ11とタンク22とを真空発生器13を介さずに接続する。これにより、コンプレッサ11からタンク22へ圧縮空気を直接的に供給することもでき、真空発生器13が停止している期間でも、真空発生器28を動作させることができる。
(もっと読む)
ロボットハンド溶接ガンシステムおよびその動作方法
【課題】ロボットハンドのコンパクト化を図り得るロボットハンド溶接ガンシステム、およびその動作方法を提供する。
【解決手段】ロボットハンド溶接ガンシステム100は、ロボットアーム410の先端に、加工対象のワーク500を溶接するための溶接ガン200と、ワークを移動するためのロボットハンド300とを接続している。ロボットハンド溶接ガンシステムはさらに、ロボットハンドに移動自在に備えられ、ワークを保持するための保持部310、320、330を有している。そして、保持部は、ワークを移動するときにワークを保持する保持位置と、ワークを溶接するときに溶接ガンから退避した退避位置との間を、自重によって移動自在となっている。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
超音波浮揚装置及びそれを備えた搬送ロボット
【課題】シリコンウェハなどの物体を非接触浮上させる超音波浮揚装置とロボットを組み合わせた搬送ロボットが提案されているが、この浮揚装置は、縦方向の体積が大きく、作業内での干渉の問題があった。浮揚装置の縦方向の体積が大きくなる原因は、超音波振動子の縦振動を利用している点にあった。
【解決手段】超音波振動子101と、超音波振動子101の音波振動を伝達するホーン105と、ホーン105に接続されて振動し、音波の放射圧によって物体を浮揚させる振動体106と、を備えた超音波浮揚装置において、ホーン105は、音波振動の波の節の位置において波が伝わる方向と直交する方向に延長された部分が形成され、延長された部分の先端に振動体106が接続される超音波浮揚装置とした。
(もっと読む)
ロボットハンドとこれを用いた対象物の把持方法
【課題】把持部の交換をすることなく、複数種類の対象物を把持でき、対象物の上方に障害物が存在しても、対象物へのアクセスを容易に行えを提供する。
【解決手段】取出位置にある対象物を挟持して別の位置まで搬送する搬送ロボットのロボットハンドであって、種類が異なる第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5、7は、開閉駆動される共通のフレーム9に設けられる。第1の挟持部5は、フレーム9の閉動作により第1の対象物2を挟むように動作し、第2の挟持部7も、フレーム9の閉動作により第2の対象物3を挟むように動作する。
(もっと読む)
ロボットハンド
【課題】1つのアクチュエータを作動させることで複数の対象物を同時に挟持できるロボットハンドを提供する。
【解決手段】第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5,7は、開閉駆動される共通のフレーム9に設けられる。第1および第2の挟持部5、7は、フレーム9の閉動作によりそれぞれ第1および第2の対象物2,3を挟むように動作する。第2の挟持部7は、第2の対象物3を弾性力で挟持する弾性力付与機構11を有し、第1の挟持部5が第1の対象物2を挟持している状態において、第2の対象物3と第2の挟持部7との間で前記弾性力が作用するようになっている。
(もっと読む)
1 - 20 / 52
[ Back to top ]