
Fターム[3C007DS07]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 複数の挟持装置又は吸着装置 (152) | 平面マトリックス配置 (16)
Fターム[3C007DS07]に分類される特許
1 - 16 / 16
電子部品把持装置及び電子部品検査装置
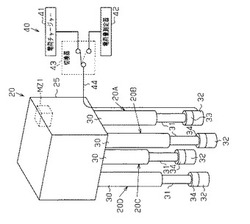
【課題】電子部品を載置するトレイなどの高さを適宜自動的に測定することのできる電子部品把持装置及び電子部品検査装置を提供する。
【解決手段】供給側ロボットハンドユニット20は、電荷を拡散させる材料からなるトレイに載置されたICチップを把持部32を当接させて把持する当接装置20Aと、当接装置20Aをトレイに対して上下方向に駆動制御する制御手段とを備える。把持部32は当接装置20Aにて独立した導電性を有するとともに、電荷の拡散に基づいて電荷を拡散させる部材との当接を検出する当接検出装置40が接続され、制御手段は、電荷を付与された把持部32をトレイに下降させ、把持部32のトレイへの当接を検出したとき、把持部32の上下方向の位置を測定する。
(もっと読む)
吸着台および球状体搭載装置

【課題】吸着対象体を確実に保持する機能を維持しつつコストの低減を実現し得る吸着台を提供する。
【解決手段】上面81a側に吸気口81hが形成された板状の基体部81と、通気性を有して吸気口81hを覆うように基体部81の上面81a側に配置されるシート体82と、厚み方向に貫通する複数の通気孔83cが形成されると共に一面83aが基体部81の上面81aに対向するようにシート体82を挟んで上面81a側に配置される吸着板83とを備え、吸着板83を上面81a側に配置した状態においてシート体82を介して吸気口81hと通気孔83cとが連通し、吸気口81hから吸気して吸着板83の他面83bに載置された基板400を吸着して保持する。
(もっと読む)
配列ピッチ変換装置及び配列ピッチ変換方法
【課題】連結パンタグラフ機構の最大長に合わせて設置していた固定的支持ガイドを省略し、コンパクトなサイズの配列ピッチ変換装置及び配列ピッチ変換方法を提供する。
【解決手段】菱形部材からなるパンタグラフ機構PNTを複数連結させてなる連結パンタグラフ機構12bにおける各連結ヒンジ部14に補強棒材を把持するグリッパ17をそれぞれ取り付け、連結パンタグラフ機構12bを伸縮させることにより、複数の補強棒材における配列ピッチを一括して変換する。連結パンタグラフ機構12bを支持補強する支持部材としての連結パンタグラフ機構11a・12aが連結方向に平行に設けられている。連結パンタグラフ機構11a・12aは、連結パンタグラフ機構12bの伸縮長さ内において連結パンタグラフ機構12bの伸縮に合わせて一体に伸縮する。
(もっと読む)
一括保持トレイ及び三次元集積回路製造装置
【課題】三次元集積回路の段数に応じたチップサイズの変化やチップ中心位置のずれに対応することが可能な一括保持トレイを提供する。
【解決手段】一括保持トレイ46を、第一の吸引経路55を有する本体部47と、本体部47に着脱自在に装着されるアタッチメント48と、から構成する。アタッチメント48は、複数のチップ20を吸着する複数の吸着部50と、複数の吸着部50から気体を吸引する第二の吸引経路49と、を有する。アタッチメント48を本体部47に装着するとき、複数の吸着部50で複数のチップ20を吸着できるように本体部の47第一の吸引経路55がアタッチメント48の第二の吸引経路49に繋がる。複数のチップ20を吸着するアタッチメント48を本体部47に対して交換可能にすることで、三次元集積回路の段数毎のチップサイズの変化やチップ中心間ピッチの変化に対応することができる。
(もっと読む)
ICハンドラ
【課題】大きさの異なる電子部品に、より対応することが可能なICハンドラを提供する。
【解決手段】このICハンドラ1は、電子部品を吸着する吸着ノズル868と、水平面内のX方向およびY方向に各々独立して移動することが可能な8つの移動ユニット89とを備え、各々の移動ユニット89毎に1つの吸着ノズル868を装着可能で、かつ、少なくとも2つの移動ユニット89に対して1つの吸着ノズル868を装着可能なように構成されている。
(もっと読む)
ガラス基板梱包装置およびその梱包方法
【課題】ガラス基板とその保護シートの高速搬送を実現し、併せて、高精度で高品質の積載梱包を達成する。
【解決手段】ガラス基板梱包装置は、保護シート3上にガラス基板4が載置される載置ステーションと、保護シート3とガラス基板4とを交互に積載する積載ステーションと、保護シート3上に載置されたガラス基板4を保護シート3と共に保持し、積載ステーションに積載する積載手段としてのガラス基板積載装置とを備える。ここで、ガラス基板積載装置を構成するロボットアームは保護シート3およびガラス基板4を保持する保持部43を有し、この保持部43は、ガラス基板4を吸着する複数の吸着パッド45と、載置された状態のガラス基板4からはみ出た保護シート3の辺縁部分のうち互いに対向する2つの辺縁部3a,3bを挟持する挟持部46とを有する。
(もっと読む)
吸引保持ハンド、搬送装置の制御方法、搬送装置および検査装置
【課題】コンパクトに構成することができると共に、ICデバイスの保持状態を維持したまま、保持形態を非接触保持と吸着保持との間で円滑に切り替えることができる吸引保持ハンド等を提供すること。
【解決手段】ICデバイス1を非接触保持する専用ベルヌーイチャック62aと、ICデバイス1を非接触保持および吸着保持が選択的に為される兼用ベルヌーイチャック62bと、専用ベルヌーイチャック62aおよび気体供給源101を接続した専用チューブ111aと、兼用ベルヌーイチャック62bおよび気体供給源101を接続した兼用チューブと、兼用ベルヌーイチャック62bおよび真空吸引源102を接続した真空吸引流路と、第2気体供給流路に介設された分岐部開閉バルブ125と、真空吸引流路に介設された真空部開閉バルブ126と、両開閉手段125,126を制御する制御装置105と、を備えたものである。
(もっと読む)
デパレタイズ装置および方法
【課題】第1位置において、複数のワークの位置と姿勢がランダムである場合でも、複数のワークを同時または集中して搬送することができ、第2位置において、ワークの向きを整列させることができ、ワークに吸着しにくい箇所があっても、効率よくワークを移載することができるデパレタイズ装置および方法を提供する。
【解決手段】1又は2以上の第1位置2にランダムに位置する複数の同一ワーク1を1又は2以上の第2位置4に移載するデパレタイズ装置10。第1位置において複数のワークを上方から撮像する撮像装置12と、撮像した画像から各ワークの上面位置と向きを検出する画像処理装置14と、ワークの上面を吊り上げ可能に吸着するロボットハンド20を有する搬送ロボット16と、搬送ロボットを制御する制御装置18とを備える。ロボットハンド20は、その下面に複数のワークを同時に吸着可能でありかつそれぞれ独立に吸着力を制御可能な複数の吸着部21を有する。
(もっと読む)
ロボットの関節部分におけるケーブルの配線構造
【課題】 ロボットハンドの関節のような小型の関節部分が駆動する際の負荷の軽減を図ることができるロボットの関節部分におけるケーブルの配線構造を提供する。
【解決手段】 ロボットハンド1は、掌部材2を備えており、掌部材2には、屈曲関節3を介して指部材4が回動可能に取り付けられている。掌部材2における第2取付位置P2および指部材4における第1取付位置P1にはケーブル5が取り付けられている。ケーブル5は、第2取付位置P2において、左斜め上方向に向けて取り出されており、第1取付位置P1において、右斜め下方向に向けて取り出されている。また、ケーブル5は、指部材4が伸展状態にあるときには、2箇所の屈曲点をもって弛んで配線されている。
(もっと読む)
把持具
【課題】 移動状態から停止した時の慣性による振動を抑制することで、振動消失までの時間を短縮して生産設備の生産能率の向上に寄与することができる把持具を提供する。
【解決手段】 生産設備2で生産されたワークまたはインモールドワークをワーク把持位置からワーク解放位置に搬送する搬送手段3に設けられる把持具1であり、この把持具1は、搬送手段3側の基部10と、この基部10に延設され、かつ複数の把持ヘッド4を備えた把持部11とからなり、把持部11は、複数の枝12〜19を分岐延出した枝群20によって構成し、基部10から最も離れている各枝12〜19それぞれの先端部側の重量を小さく(軽く)する。
(もっと読む)
把持装置及び積込装置
【課題】各寸胴型の把持対象物間の間隔を空けることなく箱詰めするのに適した把持装置を提供する。
【解決手段】把持装置は、開放状態において、ベースプレートの連通孔からシリンダ内にエアが送られると、ピストンが下降し、当該ピストンの下降に伴って、本体部の4隅相当部位に上下摺動自在に立設された各プッシュロッドも下降する。各プッシュロッドが下降すると、プッシュロッドのそれぞれの移動に伴う楔作用により、各係合部材はそれぞれの一部分が本体部の内方の空間に向かって突出するので、各係合部材の一部分が寸胴型のボトルのくびれ部に押し付けられて係合し、当該係合により、把持装置は、寸胴型のボトルを把持することができる把持状態を形成する。把持状態においてシリンダ内のエア圧を開放すると、ピストン及び各プッシュロッドが上昇し、把持装置は開放状態となる。
(もっと読む)
基板搬送システム
【課題】 基板をトレイに載せて搬送することなく、1台のロボットで複数枚の基板を同時に搬送することができる基板搬送システムを提供する。
【解決手段】 本発明の基板搬送システム1は、複数枚のウェーハWを支持するトレイ2と、複数枚のウェーハWが載置されるステージ3と、伸縮自在な多関節アーム4Bの先端に複数枚のウェーハWを支持するハンド部4Aが設けられ、トレイ2とステージ3との間で複数枚のウェーハWを一括的に移載する基板搬送ロボット4とを備え、ハンド部4A及びトレイ2はそれぞれ、互いに係合する櫛型形状を有しており、ステージ3には、ハンド部4Aとの間で複数枚のウェーハWを受け渡すための機構部(リフターピン)32が設けられている。
(もっと読む)
IC搬送装置及びコンタクタ
【課題】 ICデバイスを移送するIC搬送装置に用いられ、ICデバイスを吸着保持するコンタクタにおいて、ICデバイスの搬送効率の向上を図り、かつ、IC搬送装置の製造コスト及びランニングコストの削減を図ることができるようにする。
【解決手段】 第1のエアライン31を有する本体部33と、一端が前記第1のエアライン31に連通可能とされ、他端が外方に開放される第2のエアライン41を有すると共に、これら第1及び第2のエアライン31,41を相互に連通又は遮断する位置の間で前記本体部33に対して移動自在なシリンダ43と、前記第1及び第2のエアライン31,41を相互に遮断する位置に向けて前記シリンダ43を付勢する付勢手段47と、前記第1及び第2のエアライン31,41を相互に連通する位置に前記シリンダ43を保持する保持手段とを備えることを特徴とするコンタクタ7を提供する。
(もっと読む)
ロボットハンド
本発明は、製品積載用ロボットハンドに関する。本発明の製品積載用ロボットハンドは、複数の製品を一度に積載する。ロボットハンドは、水平に並んで離隔して配列された複数のグリッパーと、これら複数の各グリッパーの上部に結合されて各グリッパーを固定する複数の移動フレームと、これら複数の移動フレームを貫通して固定するガイドロッドと、複数の移動フレームの両側に設けられた一対のガイドウイングと、これら一対のガイドウイングを互いに連結させ、長さ調節可能なシリンダロッドとを具備する。 (もっと読む)
静電チャックおよび基板搬送用トレー
【課題】 静電チャックと基板との間にトレーを介在させることなく、静電チャックに複数枚の基板を設置できる静電チャックを提供する。
【解決手段】 本発明の静電チャック10は、そのチャック台13の上面に、複数のチャック領域16を備えている。各チャック領域16は、チャック台13の上面に複数突出形成された島状部17の各々の上面に形成されている。各島状部17の内部には、基板吸着用の双極型の電極層と、基板冷却用ガスの流出孔18がそれぞれ設けられている。この構成により、複数の基板が載置されたトレー上面にカバーを取り付けて基板をトレー40に保持する作業が不要となるので、作業性および生産性が向上し、基板の冷却効率も高められる。
(もっと読む)
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 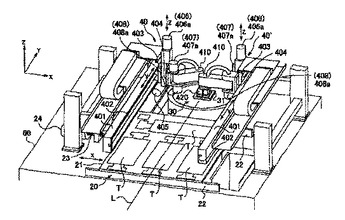 (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]