
Fターム[3C007ES01]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203)
Fターム[3C007ES01]の下位に属するFターム
Fターム[3C007ES01]に分類される特許
1 - 16 / 16
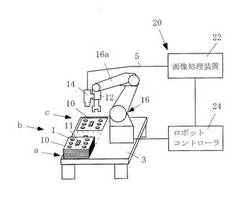
トレイ移載装置及び方法
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
ロボットハンド及びその製造方法

【課題】 高温下で使用することができるロボットハンド及びその製造方法を提供する。
【解決手段】 ロボットハンド1は、冷媒を流通させるための貫通溝5が延在する板状部材3と、貫通溝15を覆うように板状部材3の一方の主面3aに配置されたFRP成形体2と、貫通溝15を覆うように板状部材3の他方の主面3bに配置されたFRP成形体4と、を備えている。このロボットハンド1においては、板状部材3及びFRP成形体2,4によって冷媒が流通する流路が形成される。従って、その流路に冷媒を流通させることにより、炉に対してガラス基板を搬入及び搬出するなど、高温下で使用することが可能となる。
(もっと読む)
治具用ロボットハンドとこれを用いた治具の取付け/取外し方法
【課題】ワークの位置や姿勢にばらつきがある場合でも、ワークと干渉することなく、ワークに治具を正確に取付け/取外しすることができる治具用ロボットハンドとこれを用いた治具の取付け/取外し方法を提供する。
【解決手段】ワーク1に治具8を取付け/取外しする治具用ロボットハンド10。ワーク1又はこれに固定された固定部材5に設けられた嵌合孔7と嵌合する嵌合部分12bを先端部に有し、嵌合部分12bと嵌合孔7との嵌合により、治具の取付け/取外し方向にその軸線が位置決めされる円筒形のガイドロッド12と、搬送ロボット9のハンド取付部9aに取り付けられ、ガイドロッドの末端部12eをガイドロッドの移動及び揺動に追従可能に保持する追従機構14と、治具8を把持/開放可能な把持装置16と、把持装置をガイドロッドの軸線に沿って昇降させる昇降装置18とを備える。
(もっと読む)
把持装置
【課題】溝形部材の把持後に溝形部材の姿勢調整を必要としない把持装置を提供することを課題とする。
【解決手段】把持装置40は、ロアサッシュ12の底壁71に当接する第1当接部43と、連結部材18の下面73に当接する第2当接部45と、第1電動モータ46で回転させられることでロアサッシュ12の側壁72の凸部15に係合する第1凹部49及び側壁75の凸部16に係合する第1凹部48が設けられている第1係合部51と、第2電動モータ52で回転させられることで凸部15、16に係合する2つの第2凹部が設けられている第2係合部56とを備えている。
【効果】把持装置40に対するロアサッシュ12の位置決め精度が向上するので、把持装置40に対するロアサッシュ12の姿勢調整が不要になる。したがって、ロアサッシュ12の把持後にロアサッシュ12の姿勢調整を必要としない把持装置40を提供することができる。
(もっと読む)
ワーク搬送装置およびこれを使用したワーク搬送方法
【課題】荷崩れして絡み合った状態のクランクシャフト等のワークを作業者の手を借りることなく自動で取り出し搬送できる。
【解決手段】ロボットアームの先端部11に搬送治具2が設けられ、搬送治具2は中央がアーム先端部11に支持され、その一端に三次元位置認識用のカメラ42を、他端には搬送されるクランクシャフトWのシャフト部W1に嵌装される筒状の保持具3を備えている。カメラ42の画像からシャフト部W1の姿勢と位置を特定し、保持具3内にシャフト部W1を相対的にを進入させた後、保持具3を開口が上方に位置するような姿勢にしてクランクシャフトW1を持ち上げて搬送する。
(もっと読む)
車輪型ロボット
【課題】旋回走行時に無駄のない動きを行わせることができ、且つ障害物を乗り越えるとき、4輪を接地させて安定させる構造を取りながら、障害物の乗り越え時の直進性を向上させることを可能とする。
【解決手段】前輪車台部29及び後輪車台部31からなる車台フレーム1と、回転軸心が走行前後方向のベアリング・ケース33、軸受金具35,37、ベアリング・ケース41,51に回転自在に支持され車台フレーム1に前後に渡って延設され前後部に連動ベベル・ギヤ3,5を備えた操向連動軸7と、回転軸心が上下方向のベアリング・ケース39,45に回転自在に支持され下部に前後横フレーム49,51を各別に固定支持し前記前後部の連動ベベル・ギヤ3,5に各別に噛み合う操向ベベル・ギヤ9,11を各別に固定した前後輪操向軸13,15と、前輪17,19を回転駆動する駆動部25,27とを備えたことを特徴とする。
(もっと読む)
ロボットハンドの姿勢検知システム
【課題】機器構成を簡素化して製造コストの低減及び耐久性の向上を実現するとともに、あらゆる姿勢において、その姿勢を検知することを実現したロボットハンドの姿勢検知システムを提供する。
【解決手段】ロボットハンド1の指部2において、その外周面2cにはバンド8が巻き付けられている。バンド8の外周面には、互いに異なる色で着色された複数の領域b1,b2,b3,・・・,bnが形成されている。各領域b1〜bnに着色された色の色相は、それぞれ指部2の長手方向に沿って同一である。また、各領域b1〜bnの色相は、指部2の周方向に沿って連続的に変化している。ロボットハンド1から所定の距離を隔てた位置には、指部2を撮影するためのカメラ7が配置されている。カメラ7が撮影した指部2の画像は制御部6に出力され、制御部6は、画像上におけるバンド8のエッジ及び色相の変化に基づいて、ロボットハンド1の姿勢を検知する。
(もっと読む)
ドア取り外しシステム
【課題】ドアをボディから取り外して搬送する際に、ドアやボディが損傷するのを防止できるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステム1は、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステム1は、ドア11を把持しかつ略鉛直方向を旋回軸213として旋回可能な双腕ロボット20と、この旋回軸213に作用するトルクを検出するトルクセンサ214と、双腕ロボット20を制御する制御装置と、を備える。制御装置は、双腕ロボット20によりドア11を把持した状態で、この双腕ロボット20を旋回軸213で旋回させる際、トルクセンサ214により旋回軸213に作用するトルクを検出し、この検出したトルクが所定値以上である場合には、双腕ロボット20の旋回を停止する。
(もっと読む)
ピンクランプ装置とロボットアーム
【課題】ワークの位置決め孔とピンの相対位置関係を常に検出することのできるピンクランプ装置を提供する。
【解決手段】ピンクランプ装置は、ベースとピンとカメラを備える。ベースは、ロボットアームの先端に固定される。ピンは、ベースから柱状に伸びている。ピンは、ワークに形成された位置決め孔に挿入されるための部材である。カメラは、ピンに内蔵されている。カメラの光軸がピンの中心線に一致している。カメラは、ピンの先端前方方向を撮影する。光軸がピンの中心線に一致しているため、カメラの画像の中心が常にピンの中心線に沿ったピン前方を表す。ピンの先端をワークの位置決め孔に向ければ、画像の中心に位置決め孔が映し出される。カメラ画像上でワークの位置決め孔がピンの先端によって遮られてしまうことがない。ワークの位置決め孔とピンの相対位置関係を常に検出しながらピンを位置決め孔に挿入することができる。
(もっと読む)
ホルダ
【課題】加工対象を、固定点又は他の加工対象に対して位置決めをするとともに位置決めした状態で固定するための、高強度、高精度、及び軽量なホルダを提供すること。
【解決手段】加工対象を、位置決めをするとともに位置決めした状態で固定するためのホルダ(1)であって、加工対象の固定具又は装置を搭載するための、又は該ホルダをロボットに固定するための1以上の固定手段(2、3)を含む。該ホルダ(1)は内側用の、互いに結合された、平板状で薄い、いくつかの内側材料部品(7、13、14)と、外側用の、互いに結合されかつ内側材料部品とも結合された、平板状で薄い、いくつかの外側材料部品(8)とから構成され、これらは互いに閉じた空間を形成し、そして材料部品同士の結合は機械的結合具(9、10、11)及び/又は接着結合により結合されている。ホルダの製造方法は、1以上の固定板(2、3)を備える工程を含む。この方法はさらに、薄い平板状の材料から平板状の内側用(12、13、14)及び外側用(8)の材料部品を切り出す工程と、ホルダ(1)を組み立てる工程と、を含み、該内側材料部品(7、13、14)は互いに結合されるとともに外側材料部品とも結合され、該外側材料部品により取り囲まれ、これらは閉じた空間を形成するように配列され、材料部品間の結合は機械的結合具(9,10,11)及び/又は接着結合によりなされている。
(もっと読む)
ハンドラー装置
【課題】支持ばねが切れたことを検知し、ICデバイス,ICソケット,ワークプレス自身が損傷することがないハンドラ装置を実現する。
【解決手段】基台に取り付けられ上下動するワークプレスを具備するハンドラー装置において、このワークプレスに一端が取り付けられ他端が前記基台に取り付けられ前記ワークプレスを上方に引っ張る弾性装置と、前記弾性装置の弾性本体の抵抗値の閾値を設定する閾値設定回路と、前記弾性装置の弾性本体の抵抗値を測定し測定値が前記設定閾値を越えた場合に前記ワークプレスの上下動停止の信号を発する抵抗値測定回路とを具備したことを特徴とするハンドラー装置である。
(もっと読む)
部品保持装置及び部品配置装置
【課題】複雑な機構や構造を用いることなく、部品を非接触で位置決め保持する。
【解決手段】超音波振動を発生する保持面が水平方向に対向配置される、少なくとも2つの超音波振動子203を設け、該超音波振動子203の保持面の間で、部品118を超音波振動により非接触で挟持する。この部品保持装置を、部品ホルダ200内に積層された部品118を分離するための部品セパレータの出口や、部品118を移載するためのヘッド113のチャック機構に配設することができる。
(もっと読む)
パネル部品の把持装置
【課題】 パネル部品を把持する際、パネル部品の機種等が変更になっても対応でき、簡素な構成でありながら常に確実な姿勢で把持できるようにすると同時に、処理に時間がかからないようにする。
【解決手段】 パネル部品に形成される所定ピッチ間隔の共通の3ヶ所のピン孔pを把持するため、把持装置1の3ヶ所に、それぞれロック付きシリンダ5によって位置調整可能なチャック部材6を設け、ピン孔pに対する挿入方向に対して独自に位置調整可能にする。そして、取扱うパネル部品の機種等が変わった場合は、チャック部材6をピン孔pに対する挿入方向に対してフリーにしておき、機種切換え用部材10の機種に応じた3ヵ所の基準ブロック10kに、チャック部材6近傍の台座リング8の基準面8aを当接させ、この状態でチャック部材6をロックする。
(もっと読む)
クランプ装置
【課題】クランプ支持ツールのクランプ位置が種々に異なる各種ワークに対応できるようにして汎用性を高めることができるクランプ装置の提供。
【解決手段】長手方向へ移動自在に設けた各スライダ4A、4B、4Cにクランプ5A、5B、5Cを設ける。各クランプ5A、5B、5Cはワーク10の各基準穴11A、11B、11Cと対応するよう位置決めする。このとき、ワーク10の3つの基準穴11A、11B、11Cを通る120°間隔の直線a,b,cの交点であるクランプ中心点O2を計算により求め、このクランプ中心点O2と、クランプ支持ツール1のツール中心点O1を一致させ、さらにスライダ4A、4B、4Cを移動させて、各クランプ5A、5B、5Cの各ツール中心点O1からの位置を、線分a,b,cの長さと一致させることにより、各クランプ5A、5B、5Cを基準穴11A、11B、11Cと一致させる。
(もっと読む)
トランスファロボット
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
基板洗浄装置
【課題】 基板洗浄装置の工程流れ方向に対するコンパクト化を図りつつ、基板の支持を確実化させると共に、基板のエッジ部分の異物残存を回避し、製品歩留まりを向上させる。
【解決手段】 基板2を移送しつつ、スクラビング洗浄工程、リンス洗浄工程、および乾燥工程を順次実行する基板洗浄装置1において、スクラビング洗浄工程を実行する第一の槽4と、リンス洗浄工程および乾燥工程を実行する第二の槽5とを備える。そして、第二の槽5に、基板2を垂直姿勢に保持してスピンリンス洗浄およびスピン乾燥を行うための単一のスピン部58を配備する。
(もっと読む)
1 - 16 / 16
[ Back to top ]