
Fターム[3C007ES03]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 2つ (446)
Fターム[3C007ES03]に分類される特許
1 - 20 / 446
自動作業装置
【課題】ワークの種別を自動的に判別する自動作業装置のコストを抑えること。
【解決手段】ワークを把持したか否かを検知するセンサを備えたロボットハンドへ作業対象となるワークを供給する供給容器に、ワークの種別を示す被把持部を予め設けておき、作業の開始前に、ロボットハンドによって供給容器の被把持部を把持させる模擬動作を行い、ロボットハンドによる被把持部の把持位置および把持結果に基づいてワークの種別を判別するように自動作業装置を構成する。
(もっと読む)
ハンドおよびロボット

【課題】異なる大きさや形状のワークを確実に把持すること。
【解決手段】直線軸に沿って互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、スライド部のそれぞれに固定され、先端部分に把持爪を有する把持部とを備え、把持部は、上記の直線軸および把持爪の先端を含む平面と直交する向きの回転軸まわりに回転する関節部、たとえば、把持爪の先端向きを変更するように回転する第1の関節部と、第1の関節部の位置を変更するように回転する第2の関節部とを備えるようにハンドおよびロボットを構成する。
(もっと読む)
直線運動リンク機構とこれを用いた布物のたぐり展開装置
【課題】小さな形状で布辺を把持し、2つのグリッパーで持った布辺部をたぐりだし両端を把持して展開して排出するロボットハンドおよび行程長よりも本体サイズが小さな直線運動機構を提供する。
【解決手段】菱形リンク機構と、その対角線上の両支点を両端で挟むように連結した2つの同じ長さの挟持リンク機構と、挟持リンク機構どうしを連結する支点と菱形リンク機構の他の一つの支点を両端で連結した2つの同じ長さの駆動リンク機構からなる直線運動リンク機構。および前記直線運動リンク機構と2連の平行四辺形4節リンクを結合するリンク機構。2連の平行四辺形4節リンク機構を連結するリンクは支点を共有しない選択肢を持つリンク機構およびこれをもちいた布物のたぐり展開装置。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
把持装置及びその制御方法
【課題】より簡素な構成で把持対象物の把持確認及び把持解除確認を行うこと。
【解決手段】第1及び第2の把持部材が把持対象物を把持する把持位置よりも閉側の位置である基準位置に位置しているか否かを検出する検出手段を設け、把持対象物の把持後に前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出されなかった場合に、把持対象物の把持が正常であると判定し、把持対象物の把持の解除後、前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出された場合に、把持の解除が正常であると判定する。
(もっと読む)
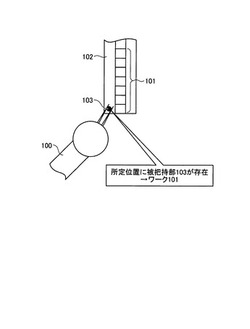
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
ロボットハンド装置
【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
トング式吊具
【課題】
ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するトング式吊具について、装置構成が小型,簡素であるという利点が損なわれず、ワークの吊持作業の安全性が確保されるようにする。
【解決手段】
ワークWの自重を利用したリンク機構の回転動作でワークWを挟込んで吊持するものである。相対してワークWを挟込む挟込支持部13がリンク機構を構成するトングアーム2の下部にそれぞれ回転可能に取付けられている。一方のトングアーム2には、一方の挟込支持部13を回転駆動する回転駆動部16が取付けられている。回転駆動部16は、手動の操作ハンドル16aで回転操作されるウオームギア16b,ウオームホイール16cのギア噛合構造からなる。
(もっと読む)
ロボットハンド
【課題】指部材を平行移動させる方式で狭い作業スペースでの作業に適用可能なロボット
ハンドを提供する。
【解決手段】対象物を把持する指部材を移動部材から立設し、掌部材に設けられた移動機
構によって移動部材を所定軸方向に移動させることで指部材を移動させて対象物を把持す
る。移動部材を所定軸方向に移動させるためのガイド部材を移動部材から立設させ、ガイ
ド部材を掌部材に対して摺動させることによってガイドする。こうすれば、指部材の間隔
を狭める(移動部材を掌部材に近づける)と、ガイド部材は掌部材に対して摺動しながら
移動部材の移動とともに移動するので、ロボットハンドが小さくなる。このため、指部材
を平行移動させる方式のロボットハンドでありながら、狭い作業スペースで小さな対象物
を把持する作業にも適用することが可能となる。
(もっと読む)
把持機
【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】コイル端部ロスを生じない巻線構造によって、コアレスでありながら高トルクのモーターを提供する。
【解決手段】円柱形状の回転体と、前記回転体の中心軸方向に延設される回転軸と、前記回転軸を回転可能に支持する基体と、前記回転体を覆う円柱缶状のステーターと、を備え、前記回転体は、円柱底面部に円周方向にN極とS極とが交互に配置される第1磁石と、円柱側面部に円周方向にN極とS極とが交互に配置される第2磁石と、を有し、前記ステーターは、前記回転体の前記円柱底面部に対向する部位と、前記回転体の前記円柱側面部に対向する部位と、中央に空隙部と、を備える複数の空芯巻線を有するモーター。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
配線基板の非接触搬送装置、配線基板の製造方法
【課題】集塵穴から異物を効率良く回収することにより、異物の周囲への拡散をより確実に抑えることができる配線基板の非接触搬送装置を提供すること。
【解決手段】本発明の非接触搬送装置は吸引部を備える。吸引部の吸引面301の外周部には、吸引面301を包囲するように突設された環状の凸部302が形成される。また、配線基板の基板主面上の異物を回収する集塵穴306が、吸引面301における凹部の外側領域かつ凸部302の内側領域に配設される。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】高出力が得られるコアを備えるコイルと、コアを備えない配線と、を備え電流の切換頻度を少なくすることにより、ブラシの長寿命化を実現する小型モーターを提供する。
【解決手段】回転可能に支持された回転軸の中心に直交し、前記回転軸に固定される回転体と、基体に固定され円周方向にN極とS極とが交互に配置された磁石と、を備え、前記回転体は、前記回転軸の回転中心を通る放射状の直線に平行に延伸された1以上の駆動配線と、円周状に配置された複数の渦巻状導体配線と、前記渦巻状導体配線内に配置されたコアと、前記駆動配線に接続された第1整流子と、前記渦巻状導体配線に接続された第2整流子と、を備え、前記第1整流子に接触し、電力を供給する第1ブラシと、前記第2整流子に接触し、電力を供給する第2ブラシと、を備え、前記渦巻状導体配線は、前記回転軸の軸方向の平面視において、前記駆動配線と重ならないモーター。
(もっと読む)
ロボット、ロボット用ハンド
【課題】対象物を確実に把持して運搬するロボット、ロボット用ハンドを提供することを課題としている。
【解決手段】2つの爪部を備え、各爪部における他方の爪部との対向面に凹部が形成されて、各爪部が基端を揺動軸として揺動することで凹部にて対象物を把持するロボットであって、各爪部の前記凹部は、爪部の先端部と揺動軸との間に、基端側の面と、先端側の面とを有し、爪部を揺動軸の軸方向に軸視した場合、基端側の面を含む直線と先端側の面を含む直線とが交差する点を基点とし、基点を通る線を基線とし、基端側の面の縁線における揺動方向の内側の端点を通り基線と直交する線を直行線とした場合、基線と先端側の面を含む直線とのなす角の角度αが0度より大きく90度未満であり、直行線と基端側の面を含む直線とのなす角の角度βが0度より大きく90度未満であり、基線における基点から直行線までの長さdが0より大きい。
(もっと読む)
1 - 20 / 446
[ Back to top ]