
Fターム[3C007ES04]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 3つ (114)
Fターム[3C007ES04]に分類される特許
1 - 20 / 114
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボットハンド

【課題】把持ストロークを可変にしつつ、軽量化かつ小型化できるロボットハンドを提供する。
【解決手段】ワークを把持するロボットハンド10であって、水平方向に配置されるサーボモータ21と、鉛直軸Pを中心とする平面視における仮想円Rの円周上に配置される複数のツメ60と、サーボモータ21の水平軸周りの回転を、鉛直軸P周りの回転に変換する第1変換機構30と、鉛直軸P周りの回転を、鉛直軸P方向の直線移動に変換する第2変換機構40と、鉛直軸P方向の直線移動を、仮想円Rの径方向Dの直線移動に変換する第3変換機構50と、を具備し、ツメ60は、第3変換機構50によって、仮想円Rの径方向Dに移動する。
(もっと読む)
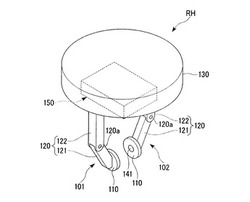
ロボットハンド及びロボット装置
【課題】簡素に低コストで異種形状や寸法違いを含む多種の対象物を把持することが可能なロボットハンドを提供する。
【解決手段】第1の指部103と第2の指部104とを含む3以上の指部と、3以上の指部を開閉動作させる駆動部MTRと、第1の指部103と第2の指部104の開閉動作を行う向きを変更する指部移動機構と、を備え、指部移動機構は、ウオームホイール131と、モーターと、ウオーム133と、を備え、第1の指部103にはウオーム133の回転に連動してウオーム133の回転方向とは異なる方向に回転する第1歯車141が設けられ、第2の指部104にはウオーム133の回転に連動して第1歯車141の回転方向とは反対の方向に回転する第2歯車142が設けられており、第1の指部103と第2の指部104とは、モーターが回転することにより互いに近づく方向もしくは遠ざかる方向に回転する。
(もっと読む)
把持装置およびその制御方法
【課題】形状が異なる複数種類のワークを安定的な把持を実現しつつ、従来に比して当接部材の寿命を延ばすことができる把持装置およびその制御方法を提供する。
【解決手段】ワーク50を把持するための把持部2と、把持動作を制御するための制御装置7と、把持部2のワーク50と当接する部位に付設され、ワーク50の形状に倣って変形し、その変形を保持し得る当接部材6と、を備え、把持部2の把持動作によって、当接部材6をワーク50に押圧して該ワーク50の外形形状に倣わせるとともに、該当接部材6の形状を保持して、ワーク50を把持する把持装置1であって、制御装置7は、所定の把持回数ごとに、ワーク50を把持した際の当接部材6のワーク50に対する当接位置を変更する。
(もっと読む)
ロボットハンド装置
【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
取り外し工具及び取り外し方法
【課題】耐久性に優れ、切断時の加工物の落下を防止することが可能な取り外し工具を提供する。
【解決手段】 材料の上部に接続部で接続され、表面から垂直方向に貫通孔を有する中央部、中央部から一端に向かって延伸し、垂直方向において第1空隙を挟んで互に対向する第1及び第2アーム、中央部から他端に向かって延伸し、垂直方向に直交する面内で互に対向し、第2及び第3空隙を挟んでそれぞれ材料と対向する第1及び第2レグを備える加工物を材料から取り外す取り外し工具であって、基体10の一主面に軸部12が配置され、他の主面に、軸部12の中心軸上に延伸する第1ピン2、第1ピン2の周囲に配置された第1〜第3フック3、5、7及び第2ピン9が配置される。第1ピン2を貫通孔に挿入して軸部12を回転させることにより、第1〜第3フック3、5、7をそれぞれ第1〜第3空隙に位置させると共に、第2ピン9を加工物の一側面に接触させる。
(もっと読む)
物体把持システム、物体把持方法、プログラム、およびロボットシステム
【課題】物体の把持を行う場合に、後工程で必要とされる物体上の把持位置または相対姿勢への変更を考慮して物体を把持する。
【解決手段】1または2以上の対象物体を撮像した画像に基づいて1または2以上の対象物体の位置姿勢を計測する位置姿勢計測部と、位置姿勢に基づいて1または2以上の把持可能な対象物体を選択する選択部と、選択された1または2以上の把持可能な対象物体から、把持位置または把持方向を含む状態ごとに予め定められた優先度に従って、最も優先度が高い状態で把持可能な対象物体を把持物体として決定する決定部と、決定された把持物体を最も優先度が高い状態で把持する把持部と、把持されている把持物体の状態を、把持物体を他の物体に対して組み付ける際の状態に変更する変更部と、を備える。
(もっと読む)
搬送装置および搬送方法
【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、測定圧を一定にして計測精度をより向上できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11Aに対し、他方の電極12Aが、所要の間隔を保ちつつスライド可能に配されたセンサー部10Aと、両電極11A、12Aに関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて計測情報を出力する計測情報出力回路50と、一方の電極11Aが固定される基部20と、ワークに対して接離動可能に設けられてワークに当接されるチャック用可動爪部30Aと、チャック用可動爪部材30Aに乗った状態で付勢部材39によってワークへの当接方向へ付勢されると共にその付勢部材39の付勢力に抗して後退可能に配されたワークへの計測用接触部37を備え、且つ他方の電極12が一体の計測用可動部材36とを具備する。
(もっと読む)
ロボット装置
【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
電動把持部材
【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
ロボットハンド、およびロボット
【課題】グリッパー型ロボットハンドと同程度に単純な構造でありながら、人間型ロボッ
トハンドのように高い汎用性を有するロボットハンドを提供する。
【解決手段】掌部に3本の指部が取り付けられており、このうちの第2指部と第3指部は
同じ向きに並べて取り付けられ、第1指部はこれらに向き合う向きに取り付けられている
。また、第2指部の取付位置は、第1指部に向き合う状態となる第1取付位置と、第2指
部および第3指部が中心位置で第1指部に向き合う状態となる第2取付位置とに切り換え
可能となっている。このため、小さな対象物は第1指部と第2指部とで把持する動作を行
い、大きな対象物は3つの指部を用いて把持する動作を行う。こうすれば、グリッパー型
のロボットハンドと同程度に単純な構造でありながら、人間型ロボットハンドのように、
様々な対象物を把持することが可能となる。
(もっと読む)
回転体の把持装置
【課題】簡単な構成で、タイヤなどの回転体の中心位置を位置決めできる回転体の把持装置を提供する。
【解決手段】タイヤ把持装置10を、把持アーム11〜13と、基台21と、基台21に立設された中心ピン部材22と、中心ピン部材22に回転可能に取付けられた板状部材23と、固定側ピン部材P1k(k=1〜3)、可動側ピン部材P2k、固定側アームA1k、可動側アームA2k、及び、中間ピン部材P3kとを備えた連結機構24とから構成するとともに、中心ピン部材22の下端と固定側ピン部材P1kを結ぶリンクを固定リンクとし、中心ピン部材22の上端と可動側ピン部材P2kを結ぶリンクと可動側アームA2kと固定側アームA1kとをそれぞれ第1〜第3の可動リンクとした3つのリンク機構により、固定側アームA1kの先端に取付けた把持アーム11〜13を拡幅して、タイヤTの内縁部を把持するようにした。
(もっと読む)
ロボットハンド
【課題】新たな機能を搭載したロボットハンドを提供する。
【解決手段】ボール14やブロック15といった物体を挟み込んで把持するために複数の指本体5を備えたロボットハンド1は、以下のように構成されている。即ち、指本体5には、その指本体5の把持面8と反対側の反把持面10に、例えば手提げバッグ12といった他の物体を引っ掛けることが可能な引っ掛け部11が形成されている。引っ掛け部11は、指本体5の反把持面10に凹状に形成されている。各指本体5の先端部5cには、把持側に突出した突部9が形成されている。
(もっと読む)
ロボットハンドのフィンガ構造
【課題】部品Pを複数のフィンガ72により把持するロボットハンド7において、あまりコストのかからない簡単な構造で所要の把持性能が安定して得られ、十分な耐久性を確保できるとともに、狭隘な環境下でも使用しやすい優れた構造のフィンガ72を提供する。
【解決手段】複数のフィンガ72のそれぞれにコイルばね81を巻き付け、その両端を除いた中間部分の巻き線をフィンガ72の外周に沿って長手方向に変位可能に取り付ける。こうすると、それらのフィンガ72によって取り囲むように部品Pを把持したときに接触点Cの数が増大する可能性があり、個々の接触点における摩擦力はあまり大きくなくとも、部品Pを安定して把持することができる。部品Pの寸法、形状等に応じてコイルばね81の巻き線の太さやピッチを選定することが好ましい。
(もっと読む)
把持装置
【課題】対象物の内周面を利用して対象物を把持する場合に、複数の把持部で対象物を把持する前にいずれかの把持部が内周面に当たって、その結果、対象物の位置または姿勢が変化してしまうことを防止する。
【解決手段】対象物1の内周面1aを利用して対象物1を把持する把持装置10。対象物1を把持する複数の把持部3a、3b、3cと、これら把持部の動作を制御する制御装置11と、を備える。複数の把持部は、内周面1aの中に挿入された状態で、互いに離間する方向に離間駆動され、これにより、内周面1aに押し付けられることで対象物1を把持する。さらに、把持部に設けられた位置情報取得センサ11aを設ける。離間駆動の時に、位置情報取得センサ11aは、把持部と内周面1aとの位置関係を検出し、制御装置11は、該位置関係に基づいて把持部の位置を調整する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】安定して対象物を把持することができるロボットハンド及びロボット装置を提供すること。
【解決手段】所定位置を囲うように配置された支持部材を有する複数の指部と、複数の指部の一端部と連結する連結部と、を備えたロボットハンドであって、少なくとも1つの指部は、屈曲部を有する接触部材と受動素子とを有し、接触部材は屈曲部で回転可能に支持部材に支持され、受動素子は支持部材と接触部材とに接続されている。
(もっと読む)
コネクタ自動挿抜装置
【課題】 多数のRFコネクタを有した供試体において、予め手作業でRFコネクタに終端器を装着することなく、複数のRFコネクタに対して終端器を自動挿抜してRFコネクタのRF特性計測を行うコネクタ自動挿抜機構を得る。
【解決手段】 終端器及びRFコネクタの端末位置を計測する画像処理装置と、終端器を保持器から取り出して把持する把持部と、把持部を3次元方向に移動させる駆動部を有したロボットハンドと、計測用ケーブルを3次元方向に移動可能な計測用ハンドと、ロボットハンドにおける把持部の把持または解放動作、およびロボットハンド及び計測用ハンドの移動動作を制御する制御装置とを備える。
(もっと読む)
把持動作機能を備えるロボットフィンガーユニット
【課題】把持動作機能を備えるロボットハンド全体の体積が小さく、フィンガー動作の自由度と把持力が高いロボットフィンガーユニットを提供する。
【解決手段】ベースと、当該ベースに固定した、回転軸を備える駆動機構と、片端側を回転軸と平行に設置した平行車軸を介し、平行車軸を回転軸として回転運動可能にベースに設置した第1部材と、第1部材の他端側に、回転軸と垂直に設置した垂直車軸を介し、垂直車軸を回転軸として回転運動可能に第1部材と連結した第2部材と、垂直車軸に垂直車軸を回転軸として回転可能に設置した滑車と駆動ケーブルとを備え、駆動ケーブルは、回転軸に巻き付けて固定した片端部と第2部材に固定した他端部と滑車に巻き付けた中間部とを備えるロボットフィンガーユニットを採用する。
(もっと読む)
1 - 20 / 114
[ Back to top ]