
Fターム[3C007ES10]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 指部材が全体的に可撓的であるもの (26)
Fターム[3C007ES10]に分類される特許
1 - 20 / 26
照明ランプ交換方法及び交換治具
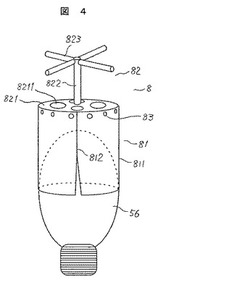
【課題】核燃料セル内の照明装置の維持管理費を低減するために照明ランプの交換を容易に行える交換治具を提供する。
【解決手段】照明ランプ56の交換治具は、マスタスレーブマニピュレータによって把持される把持部82と、照明ランプ56の外周を弾性的に把持することにより保持する弾性把持筒81より構成される。弾性把持筒81は、スリット812を有する弾性を持ったゴム板811を巻き付けて、天板821の端面にネジ止め83で固定する。照明ランプの交換時は、弾性把持筒81を照明ランプ56に挿入して照明ランプの外周を比較的弱い力で弾性的に把持する。
(もっと読む)
電動把持部材

【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
把持装置、搬送システム、把持制御方法
【課題】把持した複数の物体のうち少なくとも1つを個別に開放する技術を提供する。
【解決手段】対向面にピン33を有し、弾力が加えられる複数のバネ爪31と、バネ爪31の対向面の間に設けられ、移動位置に応じてピン33のいずれかに当接することで一対のバネ爪31が把持しているコネクタ101を開放させるカムブロック41と、カムブロック41を垂直方向に移動させるブロック駆動部51と、一対の狭持板であって先部13がバネ爪31それぞれの間に挿入されるリジッド爪12と、リジッド爪12をバネ爪31の弾力方向に移動させる本体部11とを有する把持装置である。
(もっと読む)
チャック装置
【課題】 装置全体の構造をシンプルにして低コスト化を図るようにする。
【解決手段】 チャック装置1は、先端側でワークWを把持可能なピンセット20と、ピンセット20の基端側に当接するアーム部30と、ピンセット20を弾性変形により開閉可能にするためにアーム部30をピンセット20に対して位置変位させる直動型ステッピングモータ40と、ワーク把持直前にピンセット20の閉速度を減速する、ピンセット20の閉状態の閉距離を調節する、又はワーク開放時のピンセット20の開速度を加速する等の機能を有したコントローラ50とを具備している。
(もっと読む)
マイクロピンセット、その製造方法及びその操作方法
【課題】マイクロピンセット、その製造方法及びその操作方法に関し、操作性及び簡易性を向上する。
【解決手段】アーム支持部2と前記アーム支持部に設けられ先端部を把持部9とする一対のアーム部3とからなるフレーム1と、前記一対のアームに設けられたAs−S、As−Se或いはAs−S−Seのいずれかのカルコゲナイドガラス薄膜10,11からなる駆動素子と、前記カルコゲナイドガラス薄膜に偏光保持型光ファイバ12,13を経由してレーザ光を照射するレーザ光照射手段とを備える。
(もっと読む)
試料加工装置
【課題】本発明の課題は、微小試料片およびまたはその周辺領域を汚染することなく、確実で安定的な微小試料片の分離、摘出、格納を行う装置および方法を提供することにある。
【解決手段】試料基板から観察すべき領域を含む試料片をイオンビームスパッタ法により分離し、試料を押し込んで保持し、引き抜いて分離するための、根元に比較して先端が細く、該先端部が割れている形状で、該形状により得られる試料片を保持する部位の弾性変形による力で試料片を保持する棒状部材からなるはり部材を用いて、前記試料片を試料基板から摘出し、試料片を載置するための載置台上へ移動させた後、前記はり部材と前記試料片を分離することで該試料片の格納を行う。
(もっと読む)
グリッパ
【課題】 小型化を図ることが可能なグリッパを提供すること。
【解決手段】 駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換する変換部材と、を具備し、上記変換部材は座屈部材と変位拡大部材とから構成されているものであり、それによって、変換部材が小型化できると共に大きな変位を出すのに適さない駆動源、例えば、ソレノイド等の使用が可能となり、それによって、グリッパの小型化を図ることができる。
(もっと読む)
把持装置
【課題】膨張体により対象物を把持する場合に、対象物が、従来においては把持に困難な姿勢や位置をとっていても、対象物を把持できるようにする。
【解決手段】開口1aを持つ対象物を把持する把持装置である。開口1aから対象物1の内部空間1bに挿入され、膨張可能な膨張体3を備える。膨張体3は、内部空間1b内で膨張することで対象物1の内面に接触圧を作用させ、該接触圧により対象物1を把持する。膨張体3には挿入案内部5が取り付けられ、該挿入案内部5は、開口1aへの膨張体3の挿入を案内するように膨張体3から突出している。
(もっと読む)
電動ピンセット
【課題】 電動でピンセットの把持部を閉成状態で回転させると共に、該回転量及び開閉量を調整可能なこと。
【解決手段】 電動ピンセット1は、スイッチ33を動作すると、モータ31を第1方向へ回転してカムフォロワ55が並進移動してピンセット20が開放から閉成した後、スイッチ33を動作すると、モータ31を第1方向へ回転して伝達部70及び回転部80を回転してピンセット20を閉成状態で、ピンセット20の結合部22c及び端部21a,22aを回転させるものである。
(もっと読む)
グリッパ及びマニピュレーションシステム
【課題】取り扱う対象物の変形を抑制すること。
【解決手段】グリッパ1は、基部6と、基部6に取り付けられる温度調整手段2と、温度調整手段2に取り付けられる対象物保持部4と、対象物保持部4に設けられる温度応答性ポリマー5と、温度応答性ポリマー5の温度を検出する温度検出手段3とを含む。温度応答性ポリマーは、温度に応答して構造を変化させる高分子材料であり、ポリ(N−イソプロピルアクリルアミド)が用いられる。温度調整手段2は、温度応答性ポリマー5の温度を変化させることにより、グリッパ1が保持する対象物を対象物保持部4に保持し、又は前記対象物を対象物保持部4から解放する。
(もっと読む)
グリッパシステム及びグリッパ、並びにマニピュレーションシステム
【課題】把持できる対象物の大きさの制限を緩和すること。
【解決手段】グリッパ1は、対象物を把持する把持手段2と、モータ4を用いて把持手段2を動作させる第1の駆動手段と、圧電素子入りサポートユニット3を用いて把持手段2を動作させる第2の駆動手段と、把持手段2が対象物を把持する際の把持力を検出する荷重センサ40及びひずみゲージ42を含む。把持手段2は、第1の把持部材2Aと、第1の把持部材2Aに対向して配置される第2の把持部材2Bとで構成されて、第1の把持部材2Aと第2の把持部材2Bとで対象物を挟持する。そして、モータ4を用いた第1の駆動手段が第2の把持部材2Bを動作させ、圧電素子入りサポートユニット3を用いた第2の駆動手段が第1の把持部材2Aを動作させる。
(もっと読む)
ロボットハンド及びロボットハンドの制御装置
【課題】単純な構造かつ簡単な制御によって、多種多様な形状の把持対象物を把持可能なロボットハンド及びその制御装置を提供する。
【解決手段】屈曲可能な指部と、低剛性状態と高剛性状態との間で可逆的に制御可能な剛性付与部と、把持対象物に接触可能でかつ膨張可能な当接部とを備える指を複数個、ベース部に配置し、剛性付与部が低剛性状態のとき指部を屈曲させて把持対象物に当接部を接触させ、剛性付与部を高剛性状態に硬化させ、当接部を膨張させ、把持対象物と剛性付与部の間に把持力を発生させて把持対象物の把持を行う。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において隣接する第3の左アーム3L、第3の右アーム3Rによって連結され基板10を載置するための載置部5とを備える。載置部5には、基板10の側部と当接して係止するための係止部5a、5bが設けられる。リンク機構20の隣接する第3の左アーム3L、第3の右アーム3Rには、基板10の側部と当接し基板10を載置部5の係止部5a、5bに対して付勢する付勢部6aを有する弾性の付勢部材6が固定される。付勢部材6は、第3の左アーム3L、第3の右アーム3Rの相対的な角度関係に応じて載置部5の係止部5a、5bに対する付勢部6aの距離が変化するように構成されている。
(もっと読む)
物体把持装置
【課題】円筒形状体を用いていたので、関節駆動用アクチュエータの装着バンドとして用いた場合に、関節に通しづらかった。また、把持力制御は大型システムで高製造コストで行っていた。
【解決手段】平板形状体11は複数の剛体111よりなり、これらの両端をヒンジ結合111aによって接続してあり、従って、湾曲可能になっている。偏平アクチュエータ12においては、偏平チューブ121を複数個並列接続する。さらに、偏平アクチュエータ12においては、帆布よりなる柔軟体122を一定間隔で剛体111に貼り付けてある。剛体111の中点に貼り付けてある。この柔軟体122と剛体111との間の各空隙に1つの偏平チューブ121が挿入されている。非把持状態(非湾曲状態)において、偏平チューブ121に空気を供給すると、把持状態(湾曲状態)において、各偏平チューブ121から半径方向の力frが発生する。
(もっと読む)
弾性収縮体を備えたアクチュエータ、そのアクチュエータを備えた把持機構、および、その把持機構を備えたロボットハンド。
【課題】弾性収縮体を備えたアクチュエータの高出力化を図る。
【解決手段】アクチュエータ50は、内部に流体が封入される筒状のチューブ11と、チューブ11の上端側を閉塞する閉塞部材30と、チューブ11の下端側を閉塞する閉塞部材40と、複数の糸状体を格子状に編み込むことにより形成され、チューブ11の外周を覆い、チューブ11の幅方向に伸張すると軸方向に収縮する編組部材12とを有する弾性収縮体4と、チューブ11内部の流体の圧力を調整する圧力調整装置20と、を備えている。編組部材12は、チューブ11の外径をD、編組部材12の打ち数を8n、編組部材12の重ね数をN、糸状体13のデシテックス数をT、糸状体13の引張強度をσ、糸状体13の直径をdとしたときに、(8n×T×N×σ×d)/(D×π)≧2.4×108/πを満たす様に形成されている。
(もっと読む)
把持機構およびそれを備えたロボットハンド
【課題】把持対象物を安定的に把持可能であり、かつ、制御性に優れた把持機構およびそれを備えたロボットハンドを提供する。
【解決手段】ロボットハンド1は、把持機構2,3を備えている。把持機構2,3は、線状に延び可撓性を有する弾性収縮体4と、弾性収縮体4の軸方向に倣う様に設けられた伸縮不能な規制部材5とを備えている。弾性収縮体4は、筒状のチューブ11と、チューブ11の外周を覆う編組部材12とを備えている。規制部材5は、複数のリンク部材6と各リンク部材6を連結する複数のピン7とを備えている。規制部材5には、伸縮不能なカバー26が取り付けられており、弾性収縮体4の軸方向における少なくとも一部分は、規制部材5とカバー26とにより包囲されている。圧力調整装置20により、チューブ11内部に加圧流体が供給されると、弾性収縮体4は収縮し、把持機構2,3が所定の方向に湾曲する。
(もっと読む)
保持装置およびこれを有する搬送装置
【課題】 簡単な機構を有し、内ねじ部21を有する被保持体を短時間に強固に保持する、被保持体の保持装置およびこれを有する搬送装置を提供することである。
【解決手段】 筒状体11の突出部111は、外周部の少なくとも一部に外ねじが形成されている外ねじ領域111aを有し、該突出部111は、先細状態と開張状態とに弾性変形可能である。先細状態において突出部111は、摺動方向一方Z1に向かうにしたがって先細となる形状であり、開張状態において突出部111は先細状態のときよりも摺動軸線から離れた形状となる。突出部111の内部空間に摺動部131が進入することによって、先細状態の突出部111は開張状態となる。
(もっと読む)
2指把持型ロボットハンド
【課題】2本の指を備え、指を駆動するアクチュエータへの指令値が零となっても、把持対象物を落とさない機構を有する2指把持型ロボットハンドを提供する。
【解決手段】第3リンク1に第2板ばね2が接続され、第2板ばね2に第2リンク3が接続され、第2リンク3に第1板ばね4が接続され、第1板ばね4に第1リンク5が接続されている指11であり、指11は外装6で覆われており、第1リンク5がアクチュエータ9の回転軸8の回転で直線運動することにより、把持対象物が外装6により把持され、外装6が把持対象物に接触する際に第1板ばね4と第2板ばね2が把持対象物に沿って変形することにより把持対象物を安定して把持でき、第1リンク5に接続される引張ばね7の張力によりアクチュエータ9への指令値が零となっても把持対象物を安定に落とさずに把持できる2指把持型ロボットハンド13である。
(もっと読む)
把持型ロボットハンド
【課題】2本の指を備え、指を駆動するアクチュエータへの指令値が零となっても、把持対象物を落とさない機構を有する把持型ロボットハンドを提供する。
【解決手段】第3リンク1に第2板ばね2が接続され、第2板ばね2に第2リンク3が接続され、第2リンク3に第1板ばね4が接続され、第1板ばね4に第1リンク5が接続されている指12であり、指12は外装6で覆われており、第1リンク5がアクチュエータ10の回転軸9の回転で直線運動することにより、把持対象物が外装6により把持され、外装6が把持対象物に接触する際に第1板ばね4と第2板ばね2が把持対象物に沿って変形することにより把持対象物を安定して把持でき、第1リンク5に接続される引張ばね7の張力とダンパー8の減衰力によりアクチュエータ10への指令値が零となっても把持対象物を安定に落とさずに把持できる把持型ロボットハンド14である。
(もっと読む)
微小試料把持方法、微小試料把持装置のコントローラおよび微小試料把持システム
【課題】 微小試料の把持および解放を正確に行うことができるナノピンセット装置の提供。
【解決手段】 ナノピンセット1の静電アクチュエータ4a,4bを構成する固定電極5a,5bおよび可動電極6a,6bは、いずれも櫛歯形状を呈しており、相互に複数の櫛歯が噛み合うように対向配置されている。固定電極5a,5bは台座10に固定され、アーム3a,3bおよび可動電極6a,6bは、支持部7a,7bおよびアーム支持部9a,9bにより弾性的に支持されている。記憶部40bには、各アーム3a,3bの弾性特性に応じた電圧出力パターンが記憶されている。この電圧出力パターンに基づいて静電アクチュエータ4a,4bに駆動電圧を印加することにより、アーム3a,3bは左右対称に駆動される。
(もっと読む)
1 - 20 / 26
[ Back to top ]