
Fターム[3C007ES11]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 張出型 (63)
Fターム[3C007ES11]の下位に属するFターム
Fターム[3C007ES11]に分類される特許
1 - 5 / 5
ロボット用把持ハンド
【課題】様々な形状および寸法の物品を安定把持できるロボット用把持ハンドを得る。
【解決手段】ロボット用把持ハンドは、物品を受け入れ得る開口部を持つベースと、ベース上で回転可能に支持され、中心軸心に沿って延びて中心軸心と同心のピッチ円上で互いに等角度離間して配置され、回転駆動される3つの回転軸と、回転軸に取り付けられて、解放位置あるいは間に物品を把持する把持位置に可動の把持指とを備え、回転軸および駆動装置が開口部に受け入れられる物品と干渉しない位置に配置されている。
【効果】様々な形状および寸法の物品を安定して把持できる。
(もっと読む)
つかみ装置

【課題】膨張可能なチューブを小さな折り返し幅寸法で折り返しできると共に、膨張可能なチューブの折り返し作業も容易であり、小型化に適したつかみ装置を提供する。
【解決手段】ボディ21の外周面に二カ所で折り返された膨張可能なチューブ22を配置し、膨張可能なチューブ22の両端をボディ21に密封状態でそれぞれ固定し、ボディ21の外周面に膨張可能なチューブ22で覆われる気密スペース8を構成し、気密スペース26に空気を供給することによって膨張可能なチューブ22を膨張させ、膨張させた膨張可能なチューブ22の圧接力によってワークを把持するつかみ装置20であって、膨張可能なチューブ22は、二本の単繊維の糸を縒って、全体としての直径が0.2mm未満の補強コードが埋設されたゴム材にて形成されている。
(もっと読む)
つかみ装置
【課題】膨張可能なチューブを小さな折り返し幅寸法で折り返しできると共に、膨張可能なチューブの折り返し作業も容易であり、小型化に適したつかみ装置を提供する。
【解決手段】ボディ21の外周面に二カ所で折り返された膨張可能なチューブ22を配置し、膨張可能なチューブ22の両端をボディ21に密封状態でそれぞれ固定し、ボディ21の外周面に膨張可能なチューブ22で覆われる気密スペース26を構成し、気密スペース26に空気を供給することによって膨張可能なチューブ22を膨張させ、膨張させた膨張可能なチューブ22の圧接力によってワークを把持するつかみ装置20であって、膨張可能なチューブ22は、単繊維で、且つ、直径0.2mm未満の補強コードが埋設されたゴム材にて形成されている。
(もっと読む)
把持装置
【課題】 本発明は、自動旋盤の回転を停止させずにワークの供給・排出を行う把持装置において、耐久性が高く、高速回転においても焼き付きをおこさない把持装置を提供する事を目的とする。
【解決手段】 複数のクランプ部材を駆動源により開閉する把持装置において、クランプ部材に円柱状のシャフトと、円筒状の外輪を配置し、円柱状のシャフトには円筒状の外輪と勘合する箇所に複数の穴を構成し、複数の穴からエアーを排出するとともに、円筒状外輪がワークを把持する把持装置を構成する。
(もっと読む)
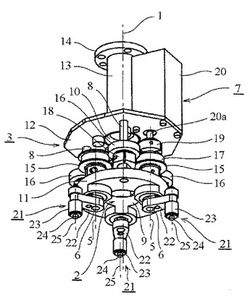
往復旋回によるロボットハンドの把持装置
【課題】塵埃等の問題もない往復旋回によるロボットのワーク把持装置を提供する。
【解決手段】角柱枠1の中心部に駆動歯車軸6が回転できるように形成し、下面部には、角柱枠1の駆動歯車軸6の下部に取り付けられた歯車7にかみ合わせた歯車8A,8B,8Cを3等配に配置し、該歯車8A,8B,8Cに取り付けた旋回軸9A,9B,9Cにシールド形軸受け15A,15B,15Cと防塵シール16A,16B,16Cを挿入できるように形成した下フタ10を角柱枠1にネジで取り付け、該旋回軸9A,9B,9Cを下フタ10下面より突出させて、該旋回軸9A,9B,9Cの下部にフインガー12A,12B,12Cを固着した腕11A,11B,11Cを取り付け、駆動歯車軸6を往復回転させることにより、同時にフインガー12A,12B,12Cも旋回してワーク50を把持、開放する。
(もっと読む)
1 - 5 / 5
[ Back to top ]