
Fターム[3C007ES15]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | コレットチャック (25)
Fターム[3C007ES15]に分類される特許
1 - 20 / 25
試料加工装置
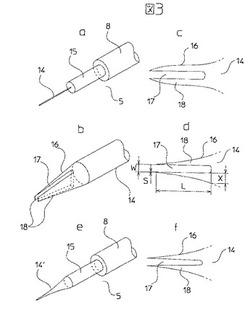
【課題】本発明の課題は、微小試料片およびまたはその周辺領域を汚染することなく、確実で安定的な微小試料片の分離、摘出、格納を行う装置および方法を提供することにある。
【解決手段】試料基板から観察すべき領域を含む試料片をイオンビームスパッタ法により分離し、試料を押し込んで保持し、引き抜いて分離するための、根元に比較して先端が細く、該先端部が割れている形状で、該形状により得られる試料片を保持する部位の弾性変形による力で試料片を保持する棒状部材からなるはり部材を用いて、前記試料片を試料基板から摘出し、試料片を載置するための載置台上へ移動させた後、前記はり部材と前記試料片を分離することで該試料片の格納を行う。
(もっと読む)
シリンダヘッドの把持装置及びその把持方法

【課題】種類の異なるシリンダヘッドの把持に好適なシリンダヘッドの把持技術を提供することを課題とする
【解決手段】シリンダヘッドの把持装置10は、斜め孔としてのプラグ孔27(図1を参照。)へ挿入されるバーであって、先端31が拡開可能となるように分割されている支持バー32、32と、支持バー32、32を拡開する開閉ロッド33と、この開閉ロッド33を進退させる開閉ロッド駆動源34と、支持部材35と、支持バー32、32を開動作させてシリンダヘッド15把持し、シリンダヘッド15を移動させ、シリンダヘッド15を押さえ部材24で押さえ、開閉ロッド33を後退させて支持バー32、32を閉じてシリンダヘッド15から抜き取る、一連の制御を実施する制御部21(図1を参照。)と、からなる
【効果】構成部品が少ないので、小型で簡単な構造にすることができる。この結果、ロボットへの負荷を小さくすることもできる。
(もっと読む)
ナット把持治具
【課題】ロボットの移動動作によってナットの把持を確実に行うことができるナット把持治具を提供すること。
【解決手段】ナット9を載置するための下治具2と、ロボット8のアーム81に接続される上治具3とよりなる。下治具2は、載置台部と、ナット9の外周面の周方向位置を規制するための外周規制部とを有し、外周規制部は、載置台部に対して軸方向に相対移動可能に配設され、規制位置に向けて付勢されている。上治具3は、アームに接続される基部30と、基部30に対して相対移動可能であると共に付勢力に抗して上記縮小位置に向けて移動した場合にナットのねじ込み方向に回転するよう構成された回転部31と、回転部31に固定され、ナット9を収容可能な把持凹部と、把持凹部に収容されたナット9を保持する保持部とを備えた把持ヘッド部35とを有する。
(もっと読む)
ワーク把持装置、および、これを用いたアッセンブリの組立て方法
【課題】複数の部品が積層されて構成されるアッセンブリについて、省スペースで効率的に組み立てできるワーク把持装置を提供すること。
【解決手段】把持装置30は、基部31と、この基部31に設けられて所定方向に延出し先端に第1の駒421を有する円筒状のガイド部42と、このガイド部42の同軸上に設けられた円筒状のコレット43と、ガイド部42およびコレット43に挿通されて、先端に第2の駒441を有する棒状のシャフト部44と、ガイド部42とシャフト部44とを相対移動させることにより、駒421、441同士を接近または離隔させるアクチュエータ41と、基部31に設けられて所定方向に進退可能でありかつ先端がワークに係止可能な係止部50と、を備え、第1の駒421および第2の駒441の外径は、コレット43側では、コレット43の内径よりも小さく、コレット43の反対側では、コレット43の内径よりも大きい。
(もっと読む)
搬送装置および機器の製造方法
【課題】搬送される被搬送物に搬送装置が把持や吸着するための専用の領域を新たに設けることなく、被搬送物を搬送することができる搬送装置を提供する。
【解決手段】 基板搬送装置100は、穴部201が形成された基板200を搬送可能な搬送装置であって、基板200に向けて進退可能に設けられると共に、基板200の表面に位置する穴部201の第1開口部から穴部201内に挿入可能な第1状態と、穴部201内に挿入された状態で、第1開口部と反対側に位置する第2開口部の開口縁部と係合可能な第2状態とに切替可能とされた係止機器140を備える。
(もっと読む)
搬送装置
【課題】中空領域を有する被搬送物を安定して保持できる簡易な構造の搬送装置を提供すること。
【解決手段】搬送装置1は、被搬送物(巻取りコア608)の中空領域Sを保持する保持領域112を有し、保持領域112を含み、スリット状の切り欠き部114が形成されることにより、先端部111が複数に分割される保持部材10と、保持部材10を挿入して保持領域112を突出させる挿入孔32を有し、保持部材10を移動可能に支持する支持部材30と、を有して構成され、保持部材10は、中空領域Sに挿入した保持領域112が中空領域Sを形成する内側形状6085の部位に当接して撓むことで巻取りコア608を保持し、また、保持部材10は、支持部材30の挿入孔32に保持領域112を移動することにより、保持領域112を更に撓ませることで内側形状6085の部位への当接を解除して巻取りコア608を放す。
(もっと読む)
チャック及び時計の製造方法
【課題】 微小なワークを保持することができるとともに、様々な表面形状のワークを確実に保持することができ、一台で表面形状の異なる複数のワークに対応することができるチャックを提供すること、及び、チャックの台数を削減してコストダウンを図るとともに、調整時間を短縮して生産性の向上を図ることができる時計の製造方法を提供することを目的とする。
【解決手段】 ストロー部材4の先端面4aをワークXに当接させるとともにストロー部材4の基端側からエア吸引することで、ストロー部材4の先端面4aにワークXを吸着させ、ワークXを保持するチャック1において、ストロー部材4は、その軸線L方向に沿って平行に配設された軸線L方向に移動可能な複数のパイプ40からなる。
(もっと読む)
工具自動交換装置
【課題】ロボット等による自動加工システムにおいて各加工工程における工具の選択を自動的に行なえるようにする。
【解決手段】 工具を駆動するエアモータ15及び当該エアモータ15に直列に設けられるものであって上記工具の着脱作動を担うチャック機構11の一体化された工具アセンブリ1と、当該工具アセンブリ1をその先端部に保持するアーム61及びリンク機構66からなるものであって上記工具アセンブリ1を三次元方向へ移動可能なように保持するロボット6と、当該ロボット6のアーム61の先端部のところに取付けられる上記工具アセンブリ1の作動及び当該工具アセンブリ1を形成する工具5の交換作動を行なう切換手段2と、からなる。上記工具アセンブリ1の駆動及び切換手段2の作動を高圧エアにて行なわせる。
(もっと読む)
スカラロボット
【課題】ワークを組み付けるサイクルタイムを短縮し、ワークの組み付け精度を高められるスカラロボットを提供する。
【解決手段】第一回転軸11を中心に回動する第一アーム21と、この第一アーム21の先端部23に設けられる第二回転軸31と、この第二回転軸31を中心に回動する第二アーム41とを備え、この第二アーム41の先端部43ハンドリング部51が設けられ、第一アーム21と第二アーム41とをそれぞれ回動させることによってこのハンドリング部51を少なくとも2次元方向に移動するスカラロボット1であって、第二アーム41の長さL2を第一アーム21の長さL1より短くし、第一アーム21に凹状に窪むハンドリング凹部35を形成し、第二アーム41が一方に回動することによりハンドリング部51がこのハンドリング凹部35に収まる構成とした。
(もっと読む)
ワーク把持装置
【課題】円筒度が十分でないワークでも、強固にワークを把持することのできるワーク把持装置を提供すること。
【解決手段】回転する主軸3に供給する流体によって軸方向に移動する押圧部材22と、該押圧部材22に連結された作動用リング20と、該作動用リング20を軸方向に摺動可能に保持する中空の本体30と、作動用リング20の内周面に形成した傾斜溝20aに摺接する傾斜突起21bを有するクランプ爪21とからなり、前記クランプ爪21を、リング軸Mに対して軸直角方向に移動してワークWを把持するワーク把持機構2を備えたワーク把持装置において、前記押圧部材22、22’作動用リング20、20’及びクランプ爪21、21’を同じリング軸Mとなるように複数組並設して、1個のワークWを長手方向に離間した複数箇所で把持するようにする。
(もっと読む)
把持装置及び積込装置
【課題】各寸胴型の把持対象物間の間隔を空けることなく箱詰めするのに適した把持装置を提供する。
【解決手段】把持装置は、開放状態において、ベースプレートの連通孔からシリンダ内にエアが送られると、ピストンが下降し、当該ピストンの下降に伴って、本体部の4隅相当部位に上下摺動自在に立設された各プッシュロッドも下降する。各プッシュロッドが下降すると、プッシュロッドのそれぞれの移動に伴う楔作用により、各係合部材はそれぞれの一部分が本体部の内方の空間に向かって突出するので、各係合部材の一部分が寸胴型のボトルのくびれ部に押し付けられて係合し、当該係合により、把持装置は、寸胴型のボトルを把持することができる把持状態を形成する。把持状態においてシリンダ内のエア圧を開放すると、ピストン及び各プッシュロッドが上昇し、把持装置は開放状態となる。
(もっと読む)
ギヤ装置組立て方法
【課題】組立てコストを低減できるギヤ装置組立て方法を提供すること。
【解決手段】変速機の組立て方法は、変速機本体11と変速機ケース12とを備える変速機10を、力覚センサ49を有する双腕ロボット30で組み立てる。すなわち、変速機ケース12を双腕ロボット30で把持し、この把持した変速機ケース12を変速機本体11上に配置し、その後、双腕ロボット30の力覚センサ49でハンド42A、42Bに作用する力を監視しながら、変速機ケース12を変速機本体11に接近させ、力覚センサ49の検出値が所定値を超えることなく、変速機ケース12が所定高さh1まで接近した場合には、変速機ケース12をさらに接近させて、変速機本体11に取り付け、変速機ケース12が所定高さh1まで接近する前に、力覚センサ49の検出値が所定値を超えた場合には、変速機ケース12を変速機本体11から離して、再試行する。
(もっと読む)
コネクタ自動挿抜装置及びコネクタ挿抜方法
【課題】 多数のRFコネクタを有した供試体において、供試体のRFコネクタから終端器を抜き差しする作業処理を自動化し、RF信号の電気特性試験における手作業の所要時間を短縮する自動装置を得る。
【解決手段】 終端器及びRFコネクタの端末位置を計測する画像処理装置と、終端器を把持する把持部と把持部を3次元方向に移動させる駆動部を有したロボットハンドと、計測用ケーブルを3次元方向に移動可能な計測用ハンドと、ロボットハンドにおける把持部の把持または解放動作、上記ロボットハンド及び計測用ハンドの移動動作を制御する制御装置とを備える。
(もっと読む)
ワーク把持具
【課題】ワークの脱落を低減することができると共に、汎用性を向上させることができるワーク把持具を提供すること。
【解決手段】ワーク40の穴41に挿入されるものであり穴41の軸方向に延びる筒部11と筒部11の端部が複数に分割された分割部12とを有する内パイプ10と、穴41の開口幅よりも小さく、かつ内パイプ10の開口幅よりも大きい突状部21を有する棒部材20とを備え、内パイプ10及び棒部材20の一部が穴41に挿入される前の状態では突状部21は内パイプ10外に配置され、内パイプ10及び棒部材20の一部が穴41に挿入された状態では棒部材20が穴41への挿入方向とは反対方向に移動することによって突状部21は内パイプ10内に配置され、突状部21によって分割部12が押し広げられ、この分割部12によってワーク40を把持する。
(もっと読む)
把持装置
【課題】置き台などの固定されていないワークをクランプし、位置精度を要求されるチャックなどの固定装置に搬送を行うような場合に、長尺円柱状ワークの傾きを矯正して搬送できる把持装置を提供する。
【解決手段】内周面にテーパ面を形成された円筒状のボディ1と、内周面にテーパ面が形成された円筒状のスライダ2と、ボディおよびスライダのテーパ面に契合する逆テーパ面を有する複数の爪部材5を同心円状に配置し、複数の爪部材が離反する方向に負荷のかかるスプリング7を配置し、ボディの上方に配置した操作プレート4と、ボディの内周面と摺動して上下にスライドするスライダを連結し、ボディと操作プレートを離反する方向に圧縮されて挿入されたスプリング6により把持するものである。
(もっと読む)
チャック装置
【課題】チャック爪が把持動作を行うチャック動作時のダミーピンとチャックとのカジリ発生を防止して、チャック動作を繰り返し確実で滑らかに行うことができるチャック装置を提供すること。
【解決手段】チャック本体1にチャック爪2が軸方向に移動可能に支持され、チャック爪2の軸方向移動に連動して縮径および拡径を行いチャック爪2の先端部にワークWを把持および解放するチャック装置であって、チャック爪2がワークWを把持する際に、チャック爪2の根元で把持可能なダミーピン4をチャック本体1に上下に移動可能に支持した。
(もっと読む)
把持装置
【課題】 耐久性があり、ぐらつきが無く、小型で確実に把持できるペットボトルの搬送に適した把持装置を提供する。
【解決手段】 円筒状ボディの下方に径方向に貫通したガイド穴を形成したボディケース1と、内周円筒面と下方に傾斜面のあるスライドケース2をボディケースの同軸外周に配置し、ピストン3とプッシャー4および連結棒5を該スライドケースと連結し、ボディケースのガイド穴7にボールを配置してスライドケースの傾斜面13および円筒面12によりボールが中心方向に突出する把持装置を構成するとともに、ピストンの上下動に伴ってペットボトル9のネック部の凸部11下方にボールが突出したあとで、ペットボトルの上方からプッシャーが下降してペットボトルの上方を圧接することにより、上下方向に把持して搬送するものである。また、ガイド穴の角度を、中心側に対して外周側を低く構成する。
(もっと読む)
水中用把持具
【課題】
通常では人の手が届かず、目視で確認することも困難な水中にある落下物を、軽量且つコンパクトな構造で容易に回収できる水中用把持具を提供すること。
【解決手段】
本発明の水中用把持具1によれば、筒状の本体部10と、本体部10を吊り下げる吊り下げ部材11と、本体部10の内部で昇降自在に設けられた内部昇降体15と、内部昇降体15を昇降させる牽引部材16と、内部昇降体15に取り付けられ、内部昇降体15の上昇により本体部10内に収納される際、弾性変形により互いに接近して水中の落下物を把持する複数本の爪17とを備えている。水中用把持具1は、本体部10と吊り下げ部材11との別体とし、落下物の落下深さに吊り下げ部材11の長さを合わせるようにしたので、水中の落下物を容易に回収することを可能にした。
(もっと読む)
バイアル瓶搬送装置およびそのアーム
【課題】 簡単な構成でバイアル瓶を搬送することができるバイアル瓶搬送装置を提供する。
【解決手段】
バイアル瓶2を保持し解放するように開閉可能な少なくとも2つのアーム26と、バイアル瓶2を保持する方向にアーム26を付勢する付勢部材31と、バイアル瓶2の搬送方向と平行に往復移動してアーム26を開閉する枠体27と、アーム26がバイアル瓶2を解放する状態に枠体27を停止する枠体ストッパ26aと、アーム26をバイアル瓶2の受取り位置と受渡し位置に移動させるアーム移動装置18,19と、アーム26が受取り位置に移動したときに枠体27に突き当たって枠体27を枠体ストッパ26aから解除し、アーム26でバイアル瓶2を保持する第1突当部材2と、アーム26が受渡し位置に移動したときに、枠体27に突き当たって枠体27を枠体ストッパ26aに係合し、アーム26をバイアル瓶2から解放する第2突当部材29とから構成されている。
(もっと読む)
容器類の掴み装置
【課題】 容器類をしっかりとぶれることなく保持でき、容器内に異物が入るおそれもなく、耐久性にも優れた容器類の掴み装置を開発する。
【解決手段】 筒状のスリーブ1内に、ロッド2をスリーブに対して相対的に軸方向に進退自在に挿入する。ロッドの先端には容器類Cの口部内に嵌入して口部の動きを制限する先端嵌入部4aを設け、ロッドの先端嵌入部の上方には半径外方向かつ下方向に放射状に突出した複数の板バネ3を設ける。板バネの先端には掴みパッド5を設ける。掴み状態においては、ロッドがスリーブに対して相対的に後退した状態で、先端嵌入部が容器類の口部内に嵌入すると共に、板バネがスリーブ内に引き込まれて窄まるように弾性変形し、掴みパッドが容器類の口部を外側から包持するので、容器をぶれることなく確実に掴むことができ、容器内部に異物が入り込むこともない。
(もっと読む)
1 - 20 / 25
[ Back to top ]