
Fターム[3C007ES17]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 載置するもの (126)
Fターム[3C007ES17]に分類される特許
1 - 20 / 126
ワーク搬送装置
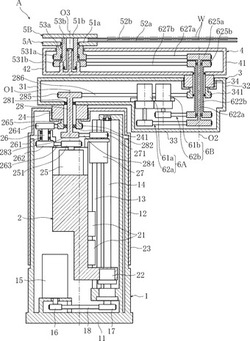
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
吸着装置及びロボットシステム

【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
取り外し工具及び取り外し方法
【課題】耐久性に優れ、切断時の加工物の落下を防止することが可能な取り外し工具を提供する。
【解決手段】 材料の上部に接続部で接続され、表面から垂直方向に貫通孔を有する中央部、中央部から一端に向かって延伸し、垂直方向において第1空隙を挟んで互に対向する第1及び第2アーム、中央部から他端に向かって延伸し、垂直方向に直交する面内で互に対向し、第2及び第3空隙を挟んでそれぞれ材料と対向する第1及び第2レグを備える加工物を材料から取り外す取り外し工具であって、基体10の一主面に軸部12が配置され、他の主面に、軸部12の中心軸上に延伸する第1ピン2、第1ピン2の周囲に配置された第1〜第3フック3、5、7及び第2ピン9が配置される。第1ピン2を貫通孔に挿入して軸部12を回転させることにより、第1〜第3フック3、5、7をそれぞれ第1〜第3空隙に位置させると共に、第2ピン9を加工物の一側面に接触させる。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
基板搬送アーム及び基板搬送装置
【課題】自重で撓んだ状態の基板を破損させずに基板収容容器から取り出すことができる基板搬送アームを提供する。
【解決手段】基板搬送アーム1は、基板収容容器内に水平に置かれた基板の下側に挿入されて、この基板の裏面を支持しつつ基板を前記収容容器から搬出する。基板搬送アーム1は、基板が搬出されるときに基板の裏面を支持する載置面12sを有する載置部と、当該基板搬送アーム1が基板の下側に挿入されるときに、基板の裏面を少なくとも載置面12sの高さにまで押し上げる押上部12rとを備える。
(もっと読む)
搬送ロボット
【課題】シンプルな構造で複数の種類のワークを搬送することができる搬送ロボットを提供する。
【解決手段】三次元に移動可能な移動部11を備えた搬送ロボット1である。移動部11は、第1ワーク8を把持するための第1把持部3と第2ツール4を接続するための第1接続部23とを設けた第1ツールを有しする。第2ツール4は、第1接続部23に着脱可能に係合する第2接続部43を有すると共に、第2ワーク9を把持するための第2把持部5を有する。第1接続部23と第2接続部43は鉛直方向に互いに嵌合することにより水平方向の位置決めを行う位置決め部24、44を有している。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
ロボットハンド及びそれを用いたパレタイジング装置
【課題】粒状物を充填した不定形袋のパレタイジングにおいて、高い積載効率を確保するとともに荷崩れを起こしにくい積付け山を形成できるようにする。
【解決手段】パレタイジング装置のロボットアーム先端側に取り付けられて不定形袋50をワーク支持手段12で支持しながら積載スペース内に積付けてパレタイジングを行うロボットハンド10であって、そのワーク支持手段12は横向きにした不定形袋50を下から支えて持ち上げるための複数本のフォーク12a,12b,12c,12dをロボットハンド前面下端側から前方に突出した状態で横方向に並列して有しており、両端のフォーク12a,12dの間で少なくとも1本以上のフォーク12b,12cが上面を両端のフォーク12a,12d上面よりも高い位置で設けられて正面視山形のフォーク配置とされており、不定形袋50を中央部が弧状に持ち上がった状態で支持しながら積付けを行うものとした。
(もっと読む)
基板載置用パッドおよびそれを用いたパッド機構
【課題】平板状の基板を着脱自在に搬送するロボットハンドに使用する基板載置用パッドおよびそれを用いたパッド機構に関し、基板の保持力を高めると共に、耐久性が高く長寿命の新しい基板載置用パッドを提供すること。
【解決手段】弾力性のある外郭層2の内部に閉じた空間3を有することを特徴とする基板載置用パッド1であって、特に、外郭層の基板に接する側の面4が外側に凸な曲面を有し、平坦な基板が載置された際に、基板の荷重により基板との接触面積が増加する。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、ハンド4の先端付近に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
基板搬送用ハンドおよびそれを備えた基板搬送装置
【課題】フレームに対する加工を増やすことなく、フレームに対するフォークの本数や位置を変更することができる基板搬送用ハンドを提供すること
【解決手段】基板116を載置するフォーク112と、フォーク112の基端を固定するフレーム111と、を備え、フォーク112が、フレームに対してスライド可能に固定されるようにした。
(もっと読む)
ウェハ搬送装置およびウェハ搬送方法
【課題】ウェハのデバイスが形成された面または形成される面に吸着痕や損傷を生じさせることなくウェハを搬送することができるウェハ搬送装置およびウェハ搬送方法を提供すること。
【解決手段】搬送ハンド30の内部には、段差部24に設けられた吸着孔32と、複数の通気用の孔31,33とが設けられている。段差部24は、リブウェハ10のデバイス面2と重ならない位置に設けられている。第1通気用の孔31は、吸着孔32に接続されている。各第1通気用の孔31同士は互いに独立している。各第1通気用の孔31には、異なる第2通気用の孔33が接続されている。各第2通気用の孔33は、それぞれ異なる配管25を介して真空発生源26に連結されている。つまり、複数の吸着孔32に対する真空系統が互いに独立して設けられている。リブウェハ10の吸着状態は、搬送ハンド30の内部に流れる空気の流速に基づいて判定される。
(もっと読む)
ロボットハンド
【課題】 曲げ剛性を確保しつつ制振性を向上させることができるロボットハンドを提供する。
【解決手段】 ロボットに組み込まれる際に保持される保持予定部Bを有するロボットハンド1は、互いに積層されたCFRP層2,3とCFRP層2とCFRP層3との間に配置された制振弾性層4とを備える。制振弾性層4は、粘弾性樹脂からなる粘弾性樹脂領域41と高剛性樹脂からなる高剛性樹脂領域42とを有する。粘弾性樹脂領域41と高剛性樹脂領域42とは、保持予定部Bにおいて、CFRP層2の長手方向に交差する方向に沿って交互に配列されている。ロボットハンド1においては、粘弾性樹脂領域41により制振性が向上される。また、保持予定部Bにおいて、粘弾性樹脂領域41と高剛性樹脂領域42とが、CFRP層2の長手方向に交差する方向に沿って交互に配列されているので、CFRP層2の長手方向に交差する方向に沿っての曲げ剛性が確保される。
(もっと読む)
ロボットハンド
【課題】 曲げ剛性を確保しつつ制振性を向上させることができるロボットハンドを提供する。
【解決手段】 ロボットハンド1は、互いに積層されたCFRP層2,3と、CFRP層2とCFRP層3との間に配置された制振弾性層4と、を備えている。制振弾性層4は、粘弾性樹脂と粘弾性樹脂に混練された繊維状物質とを含む材料からなる粘弾性樹脂領域41を有する。繊維状物質は、粘弾性樹脂の剛性よりも高い剛性を有する。このロボットハンド1によれば、CFRP層2とCFRP層3との間に、剛性が比較的高い繊維状物質が混練された粘弾性樹脂を含む材料からなる粘弾性樹脂領域41を有する制振弾性層4が配置されているので、曲げ剛性を確保しつつ制振性を向上させることができる。
(もっと読む)
基板搬送装置及び基板搬送方法並びに記憶媒体
【課題】基板載置部から基板を受け取ったときに基板の姿勢が異常な状態であるか否かを確実に検出すること。
【解決手段】前記フォーク3Aを基体31に沿って前進させ、ウエハWを保持する突き上げピン73に対して上昇させることにより、当該突き上げピン73上のウエハWをフォーク3Aに受け取る。このときに前記保持爪30A〜30Dの各々に設けられた歪みセンサ4A〜4Dにより、保持爪30A〜30Dに上から荷重が加わったときの当該保持爪30A〜30Dの歪み量を検出する。各々の歪みセンサの歪み量に基づいて、ウエハWの姿勢が正常であるか否かを判断し、ウエハWの姿勢が異常であると判断したときに、前記フォーク3Aの後退を禁止する。
(もっと読む)
基板移送ロボット
【課題】ガラス基板の移送時に、基板表面を損傷することなく安全に移送するための基板移送ロボットを提供すること。
【解決手段】基板(11)を移送するためのロボットアーム(10)と、当該ロボットアーム(10)から前記基板(11)を浮上させる浮上部(20)と、当該ロボットアーム(10)に装着されて前記基板(11)の重量を支持する基板支持部(30)とを含み、ガラス基板の移送時に、基板表面を損傷することなく安全に移送するための基板移送ロボットが提供される。
(もっと読む)
ウェーハ搬送ロボット用のハンド、ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】ウェーハの搬送ハンドを小型、軽量化し、さらに1つのハンドで異なるウェーハ口径でも、ウェーハの撓みや位置ずれを生じさせない最適な吸着位置を選択してウェーハを保持し、ウェーハを目的位置に搬送することができるハンドを提供する。
【解決手段】ウェーハを搬送するウェーハ搬送ロボットのアームに取り付けられ、ウェーハを吸着保持するための真空吸着穴が設けられたフォークを備えるウェーハ搬送ロボット用のハンドにおいて、フォークは、フォーク長手方向を回転軸として自転可能に設けられ、上面がウェーハを保持する保持面を構成し、各保持面には少なくとも1つの真空吸着穴が互いに異なる位置に設けられている構成とした。
(もっと読む)
1 - 20 / 126
[ Back to top ]