
Fターム[3C007ET08]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 直線摺動型 (302)
Fターム[3C007ET08]の下位に属するFターム
サイドクランプ (24)
Fターム[3C007ET08]に分類される特許
1 - 20 / 278
薄板状物の把持装置、および薄板状物の把持方法
【課題】
摩擦による塵埃の発生及び飛散を抑制し、従来の搬送ハンドからの置き換えが容易に且つ安価に出来、軽量で、かつ狭隘な場所にもアクセス可能な薄型の把持装置を提供すること。
【解決手段】
把持装置22は、内部に圧縮気体流通のための流路36と、圧縮気体を噴出させる噴出口30を有する搬送フィンガ23と、搬送フィンガ23先端に固定された第1の把持部材26と、駆動手段28によって動作させられる第2の把持部材29とを具えている。圧縮気体の噴出力によって浮上させられた薄板状物の周縁部を、第1の把持部材26と第2の把持部材29とで、位置ずれ補正を行いながら把持する。
(もっと読む)
ハンドおよびロボット

【課題】異なる大きさや形状のワークを確実に把持すること。
【解決手段】直線軸に沿って互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、スライド部のそれぞれに固定され、先端部分に把持爪を有する把持部とを備え、把持部は、上記の直線軸および把持爪の先端を含む平面と直交する向きの回転軸まわりに回転する関節部、たとえば、把持爪の先端向きを変更するように回転する第1の関節部と、第1の関節部の位置を変更するように回転する第2の関節部とを備えるようにハンドおよびロボットを構成する。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ロボットハンド
【課題】把持ストロークを可変にしつつ、軽量化かつ小型化できるロボットハンドを提供する。
【解決手段】ワークを把持するロボットハンド10であって、水平方向に配置されるサーボモータ21と、鉛直軸Pを中心とする平面視における仮想円Rの円周上に配置される複数のツメ60と、サーボモータ21の水平軸周りの回転を、鉛直軸P周りの回転に変換する第1変換機構30と、鉛直軸P周りの回転を、鉛直軸P方向の直線移動に変換する第2変換機構40と、鉛直軸P方向の直線移動を、仮想円Rの径方向Dの直線移動に変換する第3変換機構50と、を具備し、ツメ60は、第3変換機構50によって、仮想円Rの径方向Dに移動する。
(もっと読む)
把持装置及びその制御方法
【課題】より簡素な構成で把持対象物の把持確認及び把持解除確認を行うこと。
【解決手段】第1及び第2の把持部材が把持対象物を把持する把持位置よりも閉側の位置である基準位置に位置しているか否かを検出する検出手段を設け、把持対象物の把持後に前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出されなかった場合に、把持対象物の把持が正常であると判定し、把持対象物の把持の解除後、前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出された場合に、把持の解除が正常であると判定する。
(もっと読む)
把持装置およびその制御方法
【課題】形状が異なる複数種類のワークを安定的な把持を実現しつつ、従来に比して当接部材の寿命を延ばすことができる把持装置およびその制御方法を提供する。
【解決手段】ワーク50を把持するための把持部2と、把持動作を制御するための制御装置7と、把持部2のワーク50と当接する部位に付設され、ワーク50の形状に倣って変形し、その変形を保持し得る当接部材6と、を備え、把持部2の把持動作によって、当接部材6をワーク50に押圧して該ワーク50の外形形状に倣わせるとともに、該当接部材6の形状を保持して、ワーク50を把持する把持装置1であって、制御装置7は、所定の把持回数ごとに、ワーク50を把持した際の当接部材6のワーク50に対する当接位置を変更する。
(もっと読む)
樹脂成形品の把持装置
【課題】樹脂成形品の把持装置において、樹脂製形品の把持不良を抑止し、かつ吸着部品による擦り傷等の発生を抑止すると共に、三次元的に複雑な表面形状の多種類の樹脂成形品にも対応可能とし、かつ当該装置の小型化及びコストダウンを図る。
【解決手段】当該装置の長さ方向に移動可能な垂直ロッド17の一端側の支持部材18は、係止部材35により垂直ロッド17に固定可能であり、他端側の支持部材18はシリンダ19により昇降自在であり、中央バキュームハウジング32及び外側バキュームハウジング12の表面には可撓性の当接部材32がそれぞれ配設され、かつ内部にはマニホールドがそれぞれ形成され、各バキュームハウジング12,31の当接部材32には、各マニホールドに連通すると共に樹脂成形品Wの表面に向けて開口する複数の開口32aがそれぞれ開設される。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
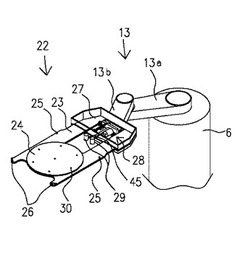
ロボットハンド
【課題】指部材を平行移動させる方式で狭い作業スペースでの作業に適用可能なロボット
ハンドを提供する。
【解決手段】対象物を把持する指部材を移動部材から立設し、掌部材に設けられた移動機
構によって移動部材を所定軸方向に移動させることで指部材を移動させて対象物を把持す
る。移動部材を所定軸方向に移動させるためのガイド部材を移動部材から立設させ、ガイ
ド部材を掌部材に対して摺動させることによってガイドする。こうすれば、指部材の間隔
を狭める(移動部材を掌部材に近づける)と、ガイド部材は掌部材に対して摺動しながら
移動部材の移動とともに移動するので、ロボットハンドが小さくなる。このため、指部材
を平行移動させる方式のロボットハンドでありながら、狭い作業スペースで小さな対象物
を把持する作業にも適用することが可能となる。
(もっと読む)
把持機
【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
把持装置
【課題】ワークの種類に応じた切り換え機構が不要である簡易な構成としながらも、大型のワークにも対応し得る把持力を確実に確保することができる把持装置を提供する。
【解決手段】ワーク10を把持するための把持装置であって、ワーク10の対応する表裏面(表面10aおよび裏面10b)に対して当接させる一対の各電磁石5・6と、各電磁石5・6を互いに押圧しあう方向に相対変位させるアクチュエータ4と、各電磁石5・6とアクチュエータ4の動作を制御する制御装置11と、を備えるとともに、制御装置11からの指令に従って、アクチュエータ4によって、各電磁石5・6を相対変位させることにより、ワーク10の重心位置Gの近傍における所定の一箇所(即ち、所定の位置X)を挟圧すると同時に、各電磁石5・6に通電することにより、ワーク10を位置Xにおいて磁着して、ワーク10を把持する。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
配線基板の非接触搬送装置、配線基板の製造方法
【課題】集塵穴から異物を効率良く回収することにより、異物の周囲への拡散をより確実に抑えることができる配線基板の非接触搬送装置を提供すること。
【解決手段】本発明の非接触搬送装置は吸引部を備える。吸引部の吸引面301の外周部には、吸引面301を包囲するように突設された環状の凸部302が形成される。また、配線基板の基板主面上の異物を回収する集塵穴306が、吸引面301における凹部の外側領域かつ凸部302の内側領域に配設される。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
指ユニット及び把持装置
【課題】形状が複雑なものや破損したり傷付きやすい把持対象物であっても、適切に掴むことが可能な指ユニット及び把持装置を提供する。
【解決手段】把持装置を構成する指ユニットは、ベース部材22の表面に指腹機構部24を設けた構成とされている。指腹機構部24は、把持対象物に対して面接触可能な表層部26と、表層部26に追従して変形可能な中間部材28と、表層部に対して裏面側から押圧可能な支持部材30とを有し、ベース部材22と表層部26との間に中間部材28及び支持部材30が配された構造とされている。指腹機構部24は、把持対象物との接触に伴って表層部26に対して圧力が作用すると、支持部材30を支点として表層部26の姿勢が把持対象物の表面に沿うように変化し、把持対象物側に作用する圧力の局所的上昇が防止される。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
把持装置
【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
1 - 20 / 278
[ Back to top ]