
Fターム[3C007EU00]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890)
Fターム[3C007EU00]の下位に属するFターム
ネジ式 (87)
歯車式 (142)
リンク式 (124)
カム式 (98)
可撓伝動部材 (120)
バネ付勢 (164)
ピストン側シリンダ側両方指部材に連結 (10)
駆動源に直結 (67)
指部材1つに対して専用の駆動源を有するもの (63)
同一駆動源で各指部材が同調しないで動けるもの (7)
Fターム[3C007EU00]に分類される特許
1 - 8 / 8
把持装置
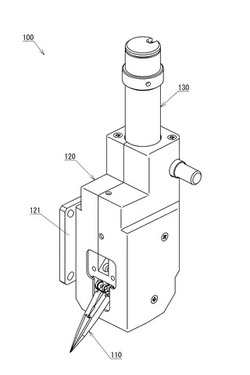
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】把持装置100は、把持部110と、本体部120と、モータ部130とを備え、取り付けプレート121によってXYZステージ等に取り付けられる。把持部110は、把持対象物を把持(狭持)するための一対のフィンガー部を備え、本体部120の内部に収容された機構及びモータ部130の内部に収容されたモータによって駆動されて、その先端が開閉することで、把持対象物を把持(狭持)する。また、把持装置100では、XYZステージ等を制御して、作業用ベース上に載置された把持対象物に対して、把持装置100全体を下降させている際に、なんらかの理由で、把持部110の先端等が、把持対象物等に接触してしまった場合、把持部110が、本体部120に対して上方に移動することができるように構成されており、それによって、把持対象物等が破損等するのを防止することができる。
(もっと読む)
チャック及びロボットハンド

【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、複数のアームを有する伸縮自在なリンク機構20と、その動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され、基板10を載置するための載置部5とを備え、載置部5には、基板10の側部と当接して係止する係止部5a、5bが設けられる。第3の左アーム3L、第3の右アーム3Rの先端部には、第3の左アーム3L、第3の右アーム3Rに設けられた凸状の駆動支持部31L、31Rと、凸状の駆動支持部31L、31Rによって駆動される従動機構部6とを備える付勢手段9が設けられる。従動機構部6は、凸状の駆動支持部31L、31Rと係合摺動可能な長孔62を有する従動部61と、従動部61の長孔62内における凸状の駆動支持部31L、31Rの移動に応じて載置部5の係止部5a、5bに向って案内移動される付勢部6aとを有する。
(もっと読む)
把持機構
【課題】種々の形状の把持対象物体を安定して把持することが可能な小型軽量な把持機構を提供することにある。
【解決手段】把持機構10では、第2の指リンク12は第1の指リンク11の一方先端にて第1の軸線A1周りに回転可能であり、第1の指リンクは第1の軸線に直交する第2の軸線A2に沿って相互に開閉運動が可能である。これにより、第2の指リンクを互いに逆方向に回転させつつ、第1の指リンクを互いに逆方向に開閉させることにより、第2の指リンクの周面を把持対象物体の表面に沿わせることができ、一対の第2の指リンクにより把持対象物体を把持・解放することができる。このため、把持可能な把持対象物体の形状が限定されることはなく、特に円盤状の把持対象物体を安定して把持できる。更に、指リンク自体は必要最小限の大きさで良いため、機構そのものの質量の増大を抑えて軽量化することができ、搭載する駆動手段や機構部材を小型化できる。
(もっと読む)
平坦な物体を把持し搬送するためのグリッパ
平坦な物体(P)、特に新聞、雑誌、またはパンフレットなどの印刷物を保持し、かつしっかり保持した状態で搬送するためのグリッパを提供する。グリッパは、互いに対して旋回して開いた形状および閉じた形状となる2つの締付け舌(4、5)を含み、締付け舌(4、5)は、閉じた形状において互いに押付けられる。締付け舌(4,5)の少なくとも一方の遠位端は、締付け力と同じ方向に、締付け舌から横方向に延在する2本の弾性アーム(30)に嵌合し、締付けあご(10,11)は、アームの各々の自由端に配置される。少なくとも一方の締付け舌の締付けあごの接触面は、ボールジョイントによってアーム(30)上に装着されるように、締付け力の下で、向い合う締付けあごの接触面または締付けられた物体に嵌合するように適合される。グリッパは、種々の平坦な物体および厚さが異なる領域を有する平坦な物体を保持し、しっかり保持した状態で搬送するのに特に適する。 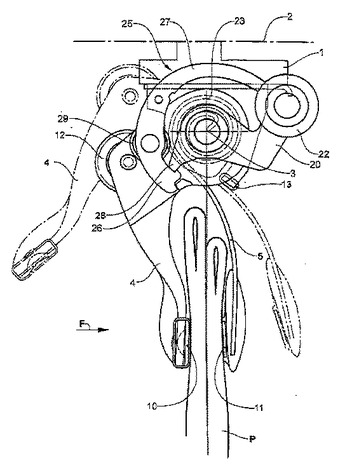 (もっと読む)
(もっと読む)
ワーク搬送装置及びワーク搬送装置におけるワーク把持方法
【課題】適正な力でワークをクランプすることができるワーク搬送装置を提供する。
【解決手段】図(a)において、作業者は第1レバー47を図反時計方向に回す。ドライバ部材46が反時計方向に回されたため、下部ローラ45は上昇する。この結果、(b)に示す下部ローラ45は第4カム溝39から離れる。歯部はラックに完全に噛み合った状態を維持する。このため、想像線で示す第2スライダ27は左右に移動する心配はない。(a)で、位置決めされた第2スライダ27を支点にして、上部ローラ44でカムプレート33を図左へ強制移動させる。
【効果】後部把持部材を確実にドアに押し付けることができる。挟持したドアに、揺れや加減速に起因する水平力が作用したとしても、後部把持部材がずれる心配がないため、ドアを確実に且つ安定して搬送することができる。
(もっと読む)
ロボットハンドおよび基板搬送ロボット
【課題】 既存のロボット本体を交換することなく、基板の搬送可能領域を大きくすることができる基板搬送ロボットのロボットハンドを提供する。
【解決手段】 ロボットハンド20を伸縮状態とすることによって、ロボットアームの先端部の可動領域では、ウェハ21の搬送に必要な可動領域に達しない場合であっても、ウェハ21の搬送に必要なウェハ21の可動領域を得ることができる。これによってロボット本体を交換することなく、搬送元位置または搬送先位置の変更可能な範囲を広げることができる。またロボットハンド20を縮退状態とすることで、ロボットアームを構成するアーム部分が他の装置と干渉する可能性を減らすことができ、ロボットの移動における制約を少なくすることができる。
(もっと読む)
関節装置及び関節装置を用いたメカニカルユニバーサルハンド
【課題】 ソフトウェアによる制御を全く必要とせずメカニカルグリッパのような機械的動作のみで、把持対象物の位置・姿勢のズレや形状・寸法の異なる対象物を適切に把持できる安価な関節装置及び関節装置を用いたメカニカルユニバーサルハンドを提供する。
【解決手段】 把持フレーム30と、前記把持フレーム30に回転自在に軸支されたシャフト33,34と、前記シャフトにトルク制限機構36を介して連結されたリンクプレート38と、前記シャフトを回転駆動する駆動機構31を備えて第一の関節装置3aを構成し、前記リンクプレート38の先端に第二の関節装置3bの把持フレーム30を連結し、第一及び第二の関節装置3a,3bのシャフト33を駆動連結する駆動連結機構39が設けられたフィンガーユニット2を基端側で連結してメカニカルユニバーサルハンドを構成する。
(もっと読む)
1 - 8 / 8
[ Back to top ]