
Fターム[3C007EU12]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | バネ付勢 (164)
Fターム[3C007EU12]の下位に属するFターム
Fターム[3C007EU12]に分類される特許
1 - 20 / 25
開閉両方向に力を出せる把持装置
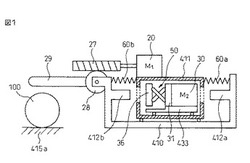
【課題】高速で駆動しかつ大きな把持力を得ることができ、開閉両方向に力を出せる把持装置を提供する。
【解決手段】第1の回転アクチュエータと、第1の回転アクチュエータで駆動される第1の動力伝達機構と、第1の動力伝達機構で駆動される第1の指と、第1の回転アクチュエータを固定載置する第1の台車と、第1の台車上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置した、第2の台車と、第2の台車に固定載置した第2の回転アクチュエータと、第2の回転アクチュエータの回転速度を減速する減速機と、減速機で駆動される第2の動力伝達機構と、第2の動力伝達機構の先端部に配置された押し板と、第1の指と共に物体を把持する、第2の指又は第1の固定壁と、を備え、第1の台車を、台座上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置し、台座には、第1及び第2の停止部と、第1及び第2のばねと、を備える。
(もっと読む)
ロボットハンド及びロボット装置

【課題】安定して対象物を把持することができるロボットハンド及びロボット装置を提供すること。
【解決手段】所定位置を囲うように配置された支持部材を有する複数の指部と、複数の指部の一端部と連結する連結部と、を備えたロボットハンドであって、少なくとも1つの指部は、屈曲部を有する接触部材と受動素子とを有し、接触部材は屈曲部で回転可能に支持部材に支持され、受動素子は支持部材と接触部材とに接続されている。
(もっと読む)
ロボットの関節構造、ロボットフィンガー及びロボットハンド
【課題】リンク部の回転角度を大きくすることなく、大きな物体から小さな物体までを確実に把持することができるロボットの関節構造、その関節構造を備えたロボットフィンガー、及びそのロボットフィンガーを備えたロボットハンドを提供する。
【解決手段】相対的に移動可能に連結された第1リンク部1及び第2リンク部2と、第2リンク部2を第1リンク部1に対して回転させると共に第1リンク部1の長手方向(X方向)に沿って移動させる駆動手段4と、を備えることを特徴とする。
(もっと読む)
多指ハンド装置
【課題】拇指機構をコンパクトに構成し且つ十分な把持力を得ることができる多指ハンド装置を提供する。
【解決手段】拇指機構5に、第1の回動軸191と第1の回動軸191の軸線に交差する軸線を有する第2の回動軸との2軸で回動する手根中手関節19,20を設ける。第1の回動軸191の回動を駆動する第1の駆動シリンダ29と、第2の回動軸の回動を駆動する第2の駆動シリンダ34とを設ける。第2の回動軸を中空に形成して基部4に配設し、第2の回動軸の内部に第1の駆動シリンダ29を設ける。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
ロボットハンドの指構造
【課題】ロボットハンドの指構造を効果的に小型化すること。
【解決手段】ロボットハンドの指構造10は、ロボットハンドの指付根部11の関節12を回転駆動する付根駆動部1と、指本体3の関節13を回転駆動する指本体駆動部2と、指本体3の長手方向に沿って配設され、相互に歯合する歯車列4と、を備えている。また、指付根部11の近傍には、付根駆動部1及び指本体駆動部2が併設されている。さらに、指本体駆動部2は、歯車列4を介して、指本体3の関節13を回転駆動する。
(もっと読む)
把持装置
【課題】構造が単純で、容器の把持幅の変動を補正でき信頼性の高い把持装置を提供する。
【解決手段】少なくとも1本の軸線を中心に旋回自在に支持されており、一方の端部に把持構造部を有する2つの剛体把持アームGと、把持アームの間で動作する蓄力器20と、軸線を超えた他方の側における、把持アームの延長部分の把持アームクローズレバー3と、クローズレバーの間で回転するクローズカムNとを備え、少なくとも1つのクローズレバー3が、弾性変形両領域Bを介してクローズカムによって作動可能で、弾性変形領域がアームのセクション7であり、このアームが、クローズカムに対して作用し、把持アームとは構造的に個別で、把持アームと一緒に旋回運動するように把持アームに密着し、クローズレバーにおける止め部4とセクションとの間に、このセクションが少なくとも実質的に変形していない状態において所定の変形空間Zが設けられている。
(もっと読む)
ロボットハンドおよび指機構
【課題】物体を変形あるいは毀損することなく把持するのに適したロボットハンドを提案すること。
【解決手段】ロボットハンド1は、リニアアクチュエータ5の作動ロッド5aの前後方向への伸縮動作を、リンク機構を介して左右の第1リンク11の開閉動作に変換している。リンク機構にはコイルバネからなる左右の中間リンク13が含まれている。左右の第1リンク11が把持対象の物体Wに当たると中間リンク13が弾性変形して伸び、物体Wを把持する力が中間リンク13の弾性変形によって徐々に増加する。物体Wに急激に大きな把持力が作用して、物体Wが変形する、毀損するなどの弊害を防止できる。
(もっと読む)
産業用ロボットのハンド装置
【課題】各指毎に各1個のモータを必要とせず、さらに、システムが異常を検出した非常停止時など、ハンド装置への電源を遮断せざるを得ないときも、ハンド装置は把持力を維持することができ、把持しているワークを落下させることがないられない産業用ロボットのハンド装置を提供。
【解決手段】ボールねじ 2の軸方向にフレーム内周にスライド可能に案内されたブロック 4と、ナット16の小径切り込み部15下面とブロックの小径部17下面との間に配置されたスプリング 9(弾性体でもよい)と、スプリング 9の変形を検出するセンサ12と、を有し、サーボモータ 3を作動させることにより各フィンガー 5の他端が開閉動作するようにし、各フィンガー 5の他端がワーク10に当たった後、さらにスプリング 9を変形してセンサ12が作動するまでサーボモータ 3を作動させた後、サーボモータ 3のブレーキ13を作動させた状態でワーク10を把持させるようにした。
(もっと読む)
把持機構
【課題】種々の形状の把持対象物体を安定して把持することが可能な小型軽量な把持機構を提供することにある。
【解決手段】把持機構10では、第2の指リンク12は第1の指リンク11の一方先端にて第1の軸線A1周りに回転可能であり、第1の指リンクは第1の軸線に直交する第2の軸線A2に沿って相互に開閉運動が可能である。これにより、第2の指リンクを互いに逆方向に回転させつつ、第1の指リンクを互いに逆方向に開閉させることにより、第2の指リンクの周面を把持対象物体の表面に沿わせることができ、一対の第2の指リンクにより把持対象物体を把持・解放することができる。このため、把持可能な把持対象物体の形状が限定されることはなく、特に円盤状の把持対象物体を安定して把持できる。更に、指リンク自体は必要最小限の大きさで良いため、機構そのものの質量の増大を抑えて軽量化することができ、搭載する駆動手段や機構部材を小型化できる。
(もっと読む)
ロボットハンド
【課題】 指部を使った種々の作業を適切に実施することができるロボットハンドを提供する。
【解決手段】 ロボットハンド1は、ベース2に連結された多関節の指部3〜6を備えている。指部4は関節11,13,15を有し、指部5は関節20,22,24を有し、指部6は関節26,28,30を有している。指部4の関節11,15は、ばねが組み込まれた柔軟関節として構成されている。同様に、指部5の関節20,24及び指部6の関節26,30は、何れも柔軟関節として構成されている。柔軟関節20,24及び柔軟関節26,30に組み込まれたばねのばね定数を柔軟関節11,15に組み込まれたばねのばね定数よりも高くすることで、柔軟関節20,24及び柔軟関節26,30の剛性が柔軟関節11,15の剛性よりも高くなっている。
(もっと読む)
ロボットハンド
【課題】手掌部と指機構と親指機構を備えたロボットハンドであって、大きな物体から小さな物体まで安定して把持可能なロボットハンドを提供すること。
【解決手段】手掌部2と、該手掌部2の先端側領域Tに位置する主手掌部3から延設され前記主手掌部3の内側に向かって屈曲可能とされる指機構30と、前記手掌部の基端側領域に位置する中手部3と、前記中手部3に接続される親指機構40とを備え、前記親指機構40は、前記指機構30を屈曲させたときに前記指機構30が通る面と交差する方向に前記手掌部2の内側に向かって屈曲可能とされ、前記中手部4は、前記親指機構40を屈曲させたときに前記親指機構40が通る面と交差する方向に回動可能とされていることを特徴とする。
(もっと読む)
グリッパ装置
【課題】装置ボディの外形が大きくなることが無く、グリッパ爪の把持力・開閉ストロークをともに大きくする。
【解決手段】装置ボディ12中央部に基準線Sが設定されている。基準線Sから放射状にのびた3つの走行経路Lが設けられている。各走行経路Lにグリッパ爪13が移動自在に支持されている。隣り合う2つの走行経路Lにそれぞれ支持されている2つのグリッパ爪13の一方に流体圧シリンダ42のシリンダチューブ43基端部が連結されており、その他方に、同流体圧シリンダ42のピストンロッド44先端部が連結されている。
(もっと読む)
ディスクチャック機構およびディスクハンドリングロボット
【課題】
磁気ディスクあるいはそのサブストレートをカセット等から取出あるいはカセット等へ収納する時にディスクへのダメージを低減するとともに高速なディスクのチャックあるいはその開放が可能なディスクチャック機構およびディスクハンドリンクロボットを提供することにある。
【解決手段】
この発明は、第1,第2、第3のリンク部材により構成されるリンク機構がスライダクランク機構を形成し、エアーシリンダ等の進退アクチュエータの駆動で第3のリンク部材が回動してこれに設けられたチャック爪を第1のリンク部材あるいは第2のリンク部材の長手方向からこれに対して直角の方向に突出させる。直角の方向に突出したチャック爪は、ディスクに係合することでその回動が停止し、さらなる第2のリンク部材の前進あるいは後退移動によりばね部材が撓み、第1のチャック爪がディスクとの係合を維持する方向に第1のチャック爪をばね部材が付勢する。
(もっと読む)
ロボットハンドおよびロボット
【課題】対象物を把持するロボットハンドによって溝状のインタフェースを操作する。
【解決手段】対象物を把持するロボットハンドに、掌部10と、掌部10から突出し、対象物を把持可能な一対のグリッパ51,52と、それらグリッパ51,52の間隔が変化するようにグリッパ51,52を移動させる開閉手段と、第1のグリッパ51の先端の第1の指先部55を押し込む直線運動によって第2のグリッパ52の先端の第2の指先部56を第1のグリッパ51に向けて回動するように駆動するリンク手段とを備える。リンク手段は、第1の指先部55に結合されたラック、そのラックにかみ合わされたピニオン、そのピニオンの回転を伝達するベルトなどを備える。
(もっと読む)
多指多関節ロボットハンドおよびロボット
【課題】
省配線化することができるロボットを提供する。
【解決手段】
第1の指および第2の指を備え、前記第1の指および第2の指が複数の関節で構成される多指多関節ロボットハンドにおいて、前記第1の指または第2の指は、前記関節を回転させるための回転駆動手段を内蔵した第1の関節部と、所定の力以上の外力が加えられると当該外力に倣って回転する回転手段を備える第2の関節部と、を備える。
(もっと読む)
保持装置およびこれを有する搬送装置
【課題】 簡単な機構を有し、内ねじ部21を有する被保持体を短時間に強固に保持する、被保持体の保持装置およびこれを有する搬送装置を提供することである。
【解決手段】 筒状体11の突出部111は、外周部の少なくとも一部に外ねじが形成されている外ねじ領域111aを有し、該突出部111は、先細状態と開張状態とに弾性変形可能である。先細状態において突出部111は、摺動方向一方Z1に向かうにしたがって先細となる形状であり、開張状態において突出部111は先細状態のときよりも摺動軸線から離れた形状となる。突出部111の内部空間に摺動部131が進入することによって、先細状態の突出部111は開張状態となる。
(もっと読む)
平坦な物体を把持し搬送するためのグリッパ
平坦な物体(P)、特に新聞、雑誌、またはパンフレットなどの印刷物を保持し、かつしっかり保持した状態で搬送するためのグリッパを提供する。グリッパは、互いに対して旋回して開いた形状および閉じた形状となる2つの締付け舌(4、5)を含み、締付け舌(4、5)は、閉じた形状において互いに押付けられる。締付け舌(4,5)の少なくとも一方の遠位端は、締付け力と同じ方向に、締付け舌から横方向に延在する2本の弾性アーム(30)に嵌合し、締付けあご(10,11)は、アームの各々の自由端に配置される。少なくとも一方の締付け舌の締付けあごの接触面は、ボールジョイントによってアーム(30)上に装着されるように、締付け力の下で、向い合う締付けあごの接触面または締付けられた物体に嵌合するように適合される。グリッパは、種々の平坦な物体および厚さが異なる領域を有する平坦な物体を保持し、しっかり保持した状態で搬送するのに特に適する。 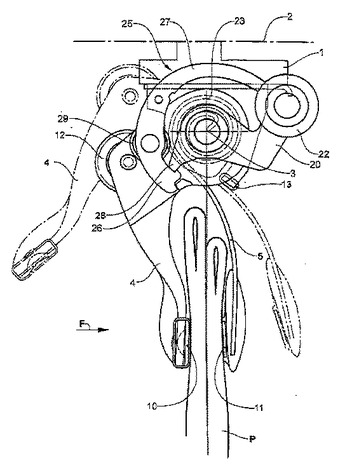 (もっと読む)
(もっと読む)
1 - 20 / 25
[ Back to top ]