
Fターム[3C007EU18]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | 指部材1つに対して専用の駆動源を有するもの (63)
Fターム[3C007EU18]の下位に属するFターム
各指部材が同調して動くもの (12)
Fターム[3C007EU18]に分類される特許
1 - 20 / 51
ワークピッキングシステム
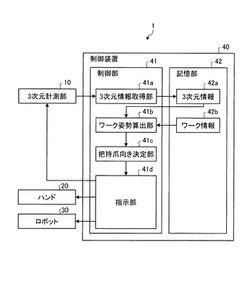
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム

【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
搬送ロボット
【課題】ワークを搬送するときの位置決め精度を確保することができると共に、ワーク運搬用箱を搬送する際にエンドエフェクタに対して作用するモーメント荷重をほとんどなくすことができ、エンドエフェクタに必要とされる許容モーメントを小さくすることができる搬送ロボットを提供すること。
【解決手段】搬送ロボット1は、把持部5によってワークを把持するときには、ロック機構部6によってバランスハンド部4を原位置に固定してエンドエフェクタ21を移動させるよう構成してある。搬送ロボット1は、把持部5によってワーク運搬用箱8Bを把持するときには、ロック機構部6によってバランスハンド部4の原位置への固定を解除することにより、バランスハンド部4、把持部5及びワーク運搬用箱8Bを合わせた重心Gが揺動軸42の下方に位置するようバランスハンド部4が揺動した状態で、エンドエフェクタ21を移動させるよう構成してある。
(もっと読む)
把持装置
【課題】対象物の内周面を利用して対象物を把持する場合に、複数の把持部で対象物を把持する前にいずれかの把持部が内周面に当たって、その結果、対象物の位置または姿勢が変化してしまうことを防止する。
【解決手段】対象物1の内周面1aを利用して対象物1を把持する把持装置10。対象物1を把持する複数の把持部3a、3b、3cと、これら把持部の動作を制御する制御装置11と、を備える。複数の把持部は、内周面1aの中に挿入された状態で、互いに離間する方向に離間駆動され、これにより、内周面1aに押し付けられることで対象物1を把持する。さらに、把持部に設けられた位置情報取得センサ11aを設ける。離間駆動の時に、位置情報取得センサ11aは、把持部と内周面1aとの位置関係を検出し、制御装置11は、該位置関係に基づいて把持部の位置を調整する。
(もっと読む)
マイクロピンセット、その製造方法及びその操作方法
【課題】マイクロピンセット、その製造方法及びその操作方法に関し、操作性及び簡易性を向上する。
【解決手段】アーム支持部2と前記アーム支持部に設けられ先端部を把持部9とする一対のアーム部3とからなるフレーム1と、前記一対のアームに設けられたAs−S、As−Se或いはAs−S−Seのいずれかのカルコゲナイドガラス薄膜10,11からなる駆動素子と、前記カルコゲナイドガラス薄膜に偏光保持型光ファイバ12,13を経由してレーザ光を照射するレーザ光照射手段とを備える。
(もっと読む)
グリッパ
【課題】 小型化を図ることが可能なグリッパを提供すること。
【解決手段】 駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換する把持部材と、を具備し、上記把持部材は反転にて形状安定なポジションを少なくとも2個持つものであり、それによって、簡単な構成で小型のグリッパを提供することができ、又、ギヤやカム等を使用した構成ではないので、摩擦もなく摩擦ロスによる機械効率低下も少ない。又、把持部材は少なくも2つの安定な形状を保持しているので、切り換えるときのみ通電すればよく、駆動源に対する通電時間を短くすることができる。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
グリッパ
【課題】 本願発明の目的は、小型化を図ることが可能なグリッパを提供することにある。
【解決手段】 本願発明によるグリッパは、駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換する変換部材と、を具備し、上記変換部材は変位拡大機能をもつ変位拡大部材から構成されているものであり、それによって、大きな変位を出すのに適さない駆動源、例えば、ソレノイド等の使用が可能となり、グリッパの小型化を図ることができる。
(もっと読む)
マニピュレータ装置およびマニピュレータの制御方法
【課題】先端部の形状を有効に利用して把持する物体の姿勢制御を行うことができるマニピュレータ装置および制御方法を提供する。
【解決手段】各先端アーム20,30の先端には、先端アーム本体52,72に対して捻転可能であり、物体に当接可能な凸曲面状の先端曲面部53,73を備える。第一駆動手段54a,54b,74a,74bにより、先端アーム本体52,72の基部に対する位置、姿勢の変更により、先端曲面部53,73の物体との接触位置における先端アーム軸に対する接触角度を変更できる。第二駆動手段54c、74cにより、先端アーム本体52,72に対する先端曲面部53,73の先端アーム軸周りの捻転角度を変更できる。制御手段2は、接触角度を変更すると共に捻転角度を変更することにより、接触角度に応じた物体の動作を物体に行わせる。
(もっと読む)
流体圧駆動装置及びそれを用いた屈伸機構
【課題】ピストンの摺動抵抗を増加させることなく軽量且つ小型に構成することができ、構造簡単として高精度な屈伸動作が可能となる流体圧駆動装置及び流体圧駆動装置を用いた屈伸機構を提供する。
【解決手段】シリンダ本体101の内面に摺接するピストン102と、ピストン102に連結されたピストンロッド103とを設ける。ピストンロッド103を金属により形成し、ピストン102を合成樹脂により形成する。ピストンロッド103は、その球部108をピストンの球面受け部106に嵌合することによりピストン102に連結する。ピストン102の外周面に、その周方向に延びる凹部107を形成する。
(もっと読む)
ハンド装置
【課題】指機構の屈伸動作を高精度に制御することができるハンド装置を提供する。
【解決手段】ハンド本体に内蔵されて指機構6を屈伸作動させる従動流体圧シリンダ23と、ハンド本体の外部にあって従動流体圧シリンダ23に流体圧伝達管45を介して接続され、従動流体圧シリンダ23に作動用流体圧を付与する駆動流体圧シリンダ36と、駆動流体圧シリンダ36から流体圧伝達管45に出力される出力流体圧を測定する第1の圧力センサ48と、従動流体圧シリンダ23に流体圧伝達管45から入力された入力流体圧を測定する第2の圧力センサ49と、第1及び第2の圧力センサ48,49による測定結果に基づいて指機構の屈伸を制御する制御手段36とを設ける。
(もっと読む)
微小マニピュレータ装置
【課題】FIB装置に組み込んだ微小マニピュレータ部をその場でエッチング加工することで、従来困難であった1μm以下の微小物のハンドリングの確実性を高めるとともに、マニピュレータの再利用により作業効率やメンテナンス性を向上する。
【解決手段】微小マニピュレータ部を位置および向きを変えることのできる移動機構で保持することにより、マニピュレーション作業前にマニピュレータ先端部をFIB加工するとともに、作業中のマニピュレータ先端の汚染や破損があった場合でも、加工により再度使用可能な形状に再生する。
(もっと読む)
腱駆動型マニピュレータのための関節空間インピーダンス制御
【課題】多節型ロボットハンドにおいて、関節同士に力学的連成を生じさせることなく関節トルク又は関節インピーダンスの閉ループ制御を行う腱駆動型マニピュレータのシステムと制御方法を提供する。
【解決手段】単一の線形演算を使用して、トルクエラーを腱の位置空間へ投影することによって、腱の基準位置又はモーターコマンドを計算する段階を備えている。センサで感知された腱張力と基準トルクと内部張力とを使用して、トルクエラーを計算する。関節位置エラーに基づいて基準トルクを計算することによって関節インピーダンスを制御するのに使用することができる。また、トルクエラーを腱張力空間に投影し、次にそれを関節空間に投影し直すことによって、最小及び最大腱張力を制限する。
(もっと読む)
ロボットハンド装置およびロボットハンドの把持方法
【課題】安価にて製造できるシンプルで堅牢な構成でありながら、形状や大きさの異なるワークであっても容易に把持することができるロボットハンド装置およびロボットハンドの把持方法を提供するを提供する。
【解決手段】ワークWを把持する複数の指2を本体3に回動自在に取り付けたロボットハンド装置1であって、各指2は、第1関節4において本体3に対して回動自在に支持される第1節5と、この第1節5に対して第2関節6において回動自在に支持される第2節7と、第1節5および第2節7を回動させる回転力を供給するモータ8と、このモータ8からの回転力を第1節5および第2節7に分配して伝達するデファレンシャル機構9とを備える。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
半導体ウエーハ搬送用ハンド
【課題】ウエーハのノッチの位置合せを実行することができ、かつ、径の異なるウエーハを搬送した場合でも、ウエーハ処理装置に対するウエーハの中心位置を位置合せすることができる半導体ウエーハ搬送用ハンドを提供する。
【解決手段】容器からウエーハWを取り出し、ウエーハWを処理する処理装置に搬送する半導体ウエーハ搬送用ハンド10であって、ハンド部材本体12と、ハンド部材本体12に対して移動可能なハンド部材14と、ハンド部材14に対して移動可能な保持部材36と、ウエーハWと接触する第1回転部材24と、第1回転部材24と共にウエーハWを回転させる第2回転部材56と、第1回転部材24と第2回転部材56が相互に離間する方向又は相互に接近する方向に沿って同じ距離だけ移動させる移動手段と、ウエーハWのノッチを検出するノッチ検出手段と、を有する構成とした。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
ロボット用ハンド
【課題】本発明は、簡便な構成で対象物を確実に把持するロボットハンドを提供する。
【解決手段】各関節7を掌側に屈曲自在に連結し、かつ屈曲復帰手段を供えた複数個の可動指内に、可動指の伸張を誘導するワイヤ3を挿通すると共に、手首方向および手指方向に移動する手段を備え、前記移動手段にワイヤ3の片端を固定した、多指可動ロボット用のハンドにおいて、ハンドの掌部に前記移動手段の駆動源1を設け、駆動源1の動力が切断されている状態では、屈曲復帰手段により、ハンドが屈曲するものである。
(もっと読む)
微小マニピュレータ、及びそれを備えた観察装置
【課題】微小マニピュレータ自体の振動を軽減することで、微小な試料を確実に操作できる微小マニピュレータ、及びそれを備えた観察装置を提供する。
【解決手段】試料300(400)を把持するための対向する一対のアーム71と、アームを支持するベース部11と、ベース部に取り付けられてアームを開閉させる開閉アクチュエータ35とを有するマニピュレータ部100aと、マニピュレータ部の変位を検出する変位検出部110a1、110a2と、ベース部と外部装置200との間に取り付けられ、マニピュレータ部を試料に対して3次元移動させる移動機構120と、変位検出部によって検出された変位を打ち消すように、移動機構を制御する制御部130とを備えた微小マニピュレータである。
(もっと読む)
1 - 20 / 51
[ Back to top ]