
Fターム[3C007EV05]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | 下面当接 (63)
Fターム[3C007EV05]に分類される特許
1 - 20 / 63
樹脂成形品の把持装置
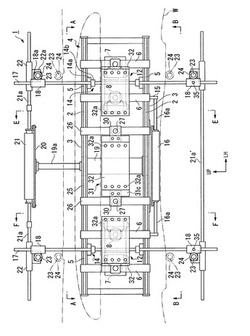
【課題】樹脂成形品の把持装置において、樹脂製形品の把持不良を抑止し、かつ吸着部品による擦り傷等の発生を抑止すると共に、三次元的に複雑な表面形状の多種類の樹脂成形品にも対応可能とし、かつ当該装置の小型化及びコストダウンを図る。
【解決手段】当該装置の長さ方向に移動可能な垂直ロッド17の一端側の支持部材18は、係止部材35により垂直ロッド17に固定可能であり、他端側の支持部材18はシリンダ19により昇降自在であり、中央バキュームハウジング32及び外側バキュームハウジング12の表面には可撓性の当接部材32がそれぞれ配設され、かつ内部にはマニホールドがそれぞれ形成され、各バキュームハウジング12,31の当接部材32には、各マニホールドに連通すると共に樹脂成形品Wの表面に向けて開口する複数の開口32aがそれぞれ開設される。
(もっと読む)
搬送ロボット用エンドエフェクタ

【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
取り外し工具及び取り外し方法
【課題】耐久性に優れ、切断時の加工物の落下を防止することが可能な取り外し工具を提供する。
【解決手段】 材料の上部に接続部で接続され、表面から垂直方向に貫通孔を有する中央部、中央部から一端に向かって延伸し、垂直方向において第1空隙を挟んで互に対向する第1及び第2アーム、中央部から他端に向かって延伸し、垂直方向に直交する面内で互に対向し、第2及び第3空隙を挟んでそれぞれ材料と対向する第1及び第2レグを備える加工物を材料から取り外す取り外し工具であって、基体10の一主面に軸部12が配置され、他の主面に、軸部12の中心軸上に延伸する第1ピン2、第1ピン2の周囲に配置された第1〜第3フック3、5、7及び第2ピン9が配置される。第1ピン2を貫通孔に挿入して軸部12を回転させることにより、第1〜第3フック3、5、7をそれぞれ第1〜第3空隙に位置させると共に、第2ピン9を加工物の一側面に接触させる。
(もっと読む)
デパレタイズロボットのロボットハンド
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
つかみ装置
【課題】ワークが不意に離脱するのを規制しつつ、長寿命化および作業の迅速化を図ること。
【解決手段】第1チューブ体2および第2チューブ体3と、各チューブ体2、3の両端がそれぞれ全周にわたって固定され、該チューブ体2、3との間に流体が給排される空間Aが形成された固定部材5と、該固定部材5に連結された弾性変位可能な可動部材6と、を備え、第1チューブ体2は、膨張変形したときに可動部材6を押圧して弾性変位させ、第2チューブ体3は、当該つかみ装置1とワークWとを軸線O方向に沿って相対的に接近移動させることでワークWに内挿または外挿され、可動部材6には、第2チューブ体3がワークWに内挿または外挿されるときに、弾性変位した可動部材6が復元変位することでワークWの被係合部W1に係合し、ワークWに対する第2チューブ体3の内挿または外挿が解除されるのを規制する係合部16が設けられているつかみ装置1を提供する。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
ウェハ搬送装置およびウェハ搬送方法
【課題】ウェハのデバイスが形成された面または形成される面に吸着痕や損傷を生じさせることなくウェハを搬送することができるウェハ搬送装置およびウェハ搬送方法を提供すること。
【解決手段】搬送ハンド30の内部には、段差部24に設けられた吸着孔32と、複数の通気用の孔31,33とが設けられている。段差部24は、リブウェハ10のデバイス面2と重ならない位置に設けられている。第1通気用の孔31は、吸着孔32に接続されている。各第1通気用の孔31同士は互いに独立している。各第1通気用の孔31には、異なる第2通気用の孔33が接続されている。各第2通気用の孔33は、それぞれ異なる配管25を介して真空発生源26に連結されている。つまり、複数の吸着孔32に対する真空系統が互いに独立して設けられている。リブウェハ10の吸着状態は、搬送ハンド30の内部に流れる空気の流速に基づいて判定される。
(もっと読む)
把持装置
【課題】簡素な構造からなり、少数のアクチュエーターで駆動することができるとともに、多様な目標物体に対応することができる把持装置を提供する。
【解決手段】把持装置1は、グリッパーの対向する左右の2指がともに平行リンクで構成される。左右の指部25、35の把持面には、薄く細かい物体を捕捉するための爪部が、内側に向かって突出する爪部が、先端縁に沿ってそれぞれ形設されている。爪は、その断面が45度程度の鋭角をなし、開閉方向の内側に向かって突設している。したがって、左右の指部25、35を閉成すると、爪の鋭角な先端が対象物体と接地面の間に潜り込むので、掴み易くなる。
(もっと読む)
基板搬送用ロボットアームのフォーク構造
【課題】基板搬送用ロボットのハンド部のフォークに対して要求される耐熱性要求、剛性要求、軽量化要求を満たすと共に、長尺化要求をも満たすフォーク構造を提供する。
【解決手段】基板に薄膜処理を施す際に使用する基板を搬送するロボットのハンド部に使用されるフォーク構造において、幅方向に複数枚の板状部材11,12,13を連ね、当該連ねられた複数枚の板状部材を長手方向に複数段継ないだ梁状構造物をなし、当該連ねられた複数枚の板状部材を長手方向に継ぐ位置において、基端側の複数枚の板状部材と先端側の複数枚の板状部材が互い違いに重なり合っており、当該複数の板状部材が互い違いに重なり合っている部位の少なくとも2箇所において、複数個のボルト・ナット51a等による機械的な締結部品や凹凸面の嵌合によるせん断荷重伝達手段51を設けた構成のフォーク構造とした。
(もっと読む)
把持装置
【課題】センサを使用せず、簡単な構造で、様々な重さを有する柔軟物から高硬度物を把持することが可能な把持装置を提供する。
【解決手段】把持装置10は、被把持物12の上方に配置され、被把持物12の把持に先駆けて上移動する支持体15と、支持体15の左右両側にそれぞれ基部が回動自在に連結され、先部が基部より左右外側の下方位置に配置され、基部を中心として同期して回動する左右対称形状の第1、第2の平行リンク20、21と、第1、第2の平行リンク20、21の先部に回動自在に連結された左右の連結部材26、27と、左右の連結部材26、27の内側にあって、基部が左右の連結部材26、27に回動自在に連結された第3、第4の平行リンク32、33と、第3、第4の平行リンク32、33の先部に設けられ、垂直状態を維持しながら対向配置される左右のパッド13、14とを有し、第3、第4の平行リンク32、33は水平に対して上向き傾斜している。
(もっと読む)
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
アクチュエータ及び把持装置
【課題】構造が簡単で製造コストが安価であり、狭い場所にも適用可能な把持装置を提供すること。
【解決手段】1対の把持指の各々について、少なくとも端部が重なるように配置し連結された2枚以上の金属薄板1と、この連結側端部6の反対側端部において金属薄板を金属薄板の長さ方向に対して垂直に往復動させ、把持指の連結側端部を、応力作用により揺動動作させる手段を設けること特徴とする。この揺動動作により、把持対象物を抱き込み、確実に把持できる。
(もっと読む)
ワーク設置装置とワーク設置方法
【課題】 わずかに位置誤差があってもワーク搬送装置のロボットハンドが被設置部材に干渉することなくワークを把持、搬送することができるとともに、ワークに把持部を設けなくても搬送できるワーク設置装置とワーク設置方法を提供することである。
【解決手段】 3次元的に移動可能な把持機構5に取り付けられ、水平方向に移動可能であり、その間に外周面1bを開放可能に把持可能な複数のツメ部材12と複数のツメ部材12を互いに連動して水平方向に駆動する開閉アクチュエータ14とを備える。ツメ部材12はワーク1の外周面1bを把持する把持面12bと水平な底面1cを支持する支持面12cとを有する。被設置部材2は、上端部に案内テーパ面2bを有しワーク1の外周面1bと嵌合する嵌合部2aと、ワーク1の底面1cを支持する底面支持部2cと、ワーク1が鉛直に下降してその底面1cが底面支持部2cに載る位置まで複数のツメ部材12と干渉しないように設けられた切り欠き溝2dとを有する。
(もっと読む)
先端可動爪を有するチャックハンド
【課題】ワークが近接して配置されていたり、ワークに設けられた特定の凹みを利用してワークを把持するような場合でも、ハンドが挿入できるだけのスペースでワークの把持部に挿入することができ、ハンドでワークを挟む「挟み動作」により、先端可動爪を引き起こしてワーク下面を支持しその落下を防止する「すくい動作」ができる先端可動爪を有するチャックハンドを提供する。
【解決手段】搬送ロボットのハンド取付部に取り付けられたハンド本体12と、ハンド本体に末端部が開閉可能に取り付けられた複数のハンド14と、各ハンドの先端部に設けられハンドと直線状に位置するハンド伸直位置Lとハンドから引き起こされた他方位置Iに揺動可能な複数の先端可動爪16と、各ハンド内に設けられ複数のハンドでワークを挟む「挟み動作」により先端可動爪をハンド伸直位置から引き起こす複数の揺動機構20とを備える。
(もっと読む)
ワーク搬送方法およびワーク搬送装置
【課題】設備コストを抑制し、かつ、ハンドと固定治具との間におけるワークの双方向の受け渡しを確実に実施することが可能であるワーク搬送方法およびワーク搬送装置を提供する。
【解決手段】固定治具110に配置され、ワーク10に配置される開口部に挿入自在であるロケートピン120、固定治具110に対して近接離間自在に配置されるワーク搬送用のハンド130、ハンド130に配置され、ワーク10の開口部に挿入自在であり、固定治具110のロケートピン120と同心となるよう位置決めされる伸縮自在のロケートピン140、および、ハンド130のロケートピン140が開口部に挿入されたワーク10を、ワーク10が引き渡される固定治具110に向かって押し出すノックアウト機構150を有する。
(もっと読む)
搬送装置、搬送方法、露光装置、及びデバイス製造方法
【課題】載置ずれや変形を生じさせることなく、基板保持部に基板を受け渡すこと。
【解決手段】基板Pを保持する基板保持部としてのプレートホルダ9に基板Pを搬送する搬送装置は、基板Pを支持する支持装置としての搬送ハンド12と、搬送ハンド12を駆動し、プレートホルダ9からの搬送ハンド12の一部の高さと他部の高さとを相対的に変化させ、かつその一部の高さ及び他部の高さを減少させて、搬送ハンド12が支持する基板Pをプレートホルダ9に受け渡す駆動装置13,14と、を備える。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
エンドイフェクタ
【課題】 発塵や、ハンドおよび基板の撓み、振動が少ないエンドイフェクタを提供するものである。
【解決手段】 基板Wの周縁を径方向外方から把持するエンドイフェクタが、ロボットハンドHに取り付けられるベース部材11と、ベース部材11に設けられるU字状のハンド部材12と、ハンド部材12の連結側に接続して設けられ、ハンド部材12の先端開口側を開閉駆動するアクチュエータ13と、を備えている。ハンド部材12は、左右対称な一対のハンド部121、両ハンド部121を一体に連結し、アクチュエータ13に接続される連結可撓部122、および両ハンド部121に設けられ、基板Wの周縁を把持する基板把持部30を有し、両ハンド部121の連結可撓部寄りの部分とベース部材11とを回動支持部材200にてそれぞれピン結合し、両ハンド部121をベース部材11に対して回動自在に設ける。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
1 - 20 / 63
[ Back to top ]