
Fターム[3C007EV07]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | 係合(凹凸係合、フランジ縁係合等) (51)
Fターム[3C007EV07]に分類される特許
1 - 20 / 51
ドア把持装置及び方法
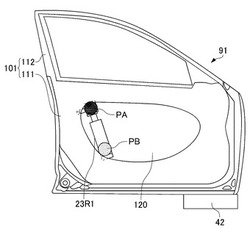
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
搬送装置および搬送方法

【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
ロボットハンドのツール着脱機構
【課題】ツールの交換時間が短く、かつ視覚センサなどのツールを取り付けた場合でもロボットのハンド部全体を軽量化・コンパクト化することができるロボットハンドのツール着脱機構を提供する。
【解決手段】1対の爪部材11,12が平行に開閉するロボットハンド10でツール20を着脱するロボットハンドのツール着脱機構。ツール20がツールベース22を有し、ツールベース22は、爪部材11,12の開動作又は閉動作により爪部材の一部と係合してその位置を位置決めする3以上の位置決め装置24を備える。
(もっと読む)
ロボットハンド
【課題】新たな機能を搭載したロボットハンドを提供する。
【解決手段】ボール14やブロック15といった物体を挟み込んで把持するために複数の指本体5を備えたロボットハンド1は、以下のように構成されている。即ち、指本体5には、その指本体5の把持面8と反対側の反把持面10に、例えば手提げバッグ12といった他の物体を引っ掛けることが可能な引っ掛け部11が形成されている。引っ掛け部11は、指本体5の反把持面10に凹状に形成されている。各指本体5の先端部5cには、把持側に突出した突部9が形成されている。
(もっと読む)
搬送装置及びその位置決め方法
【課題】センサフィードバックなしに、搬送装置の位置決め精度を高める技術を提供する。
【解決手段】搬送装置100は、自走台車10、自走台車に取り付けられたロボットアーム12、係合器14、及び、コントローラ18を備える。係合器14は、ロボットアーム12の先端に取り付けられている。また、係合器14は、ワークラック90の基準ブロック92と係合するように構成されている。係合器14は、係合すると基準ブロック92との相対位置が正確に定まるように構成されている。コントローラ18は、まず、係合器14が基準ブロック92に届く範囲に自走台車10を移動させる。次いで、自走台車10の車輪を受動回転自在状態としながら、係合器14を基準ブロック92に係合させるように係合器14を制御する。係合器14と基準ブロック92の間に作用する反力によって自走台車10の位置が修正される。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
基板保持部材、基板搬送装置、基板搬送方法、ステージ装置、露光装置及びデバイス製造方法
【課題】基板の変形を抑えて基板の受け渡しができること。
【解決手段】基板を保持し、支持部によって支持される基板保持部材であって、前記基板が載置される載置面を有する基板載置部と、前記基板載置部と一体的に設けられ、前記載置面を含む面内に位置する所定軸を中心として前記基板載置部が回転可能なように前記支持部によって支持される被支持部とを備える。
(もっと読む)
把持装置
【課題】溝形部材の把持後に溝形部材の姿勢調整を必要としない把持装置を提供することを課題とする。
【解決手段】把持装置40は、ロアサッシュ12の底壁71に当接する第1当接部43と、連結部材18の下面73に当接する第2当接部45と、第1電動モータ46で回転させられることでロアサッシュ12の側壁72の凸部15に係合する第1凹部49及び側壁75の凸部16に係合する第1凹部48が設けられている第1係合部51と、第2電動モータ52で回転させられることで凸部15、16に係合する2つの第2凹部が設けられている第2係合部56とを備えている。
【効果】把持装置40に対するロアサッシュ12の位置決め精度が向上するので、把持装置40に対するロアサッシュ12の姿勢調整が不要になる。したがって、ロアサッシュ12の把持後にロアサッシュ12の姿勢調整を必要としない把持装置40を提供することができる。
(もっと読む)
ワーク搬送装置およびこれを使用したワーク搬送方法
【課題】荷崩れして絡み合った状態のクランクシャフト等のワークを作業者の手を借りることなく自動で取り出し搬送できる。
【解決手段】ロボットアームの先端部11に搬送治具2が設けられ、搬送治具2は中央がアーム先端部11に支持され、その一端に三次元位置認識用のカメラ42を、他端には搬送されるクランクシャフトWのシャフト部W1に嵌装される筒状の保持具3を備えている。カメラ42の画像からシャフト部W1の姿勢と位置を特定し、保持具3内にシャフト部W1を相対的にを進入させた後、保持具3を開口が上方に位置するような姿勢にしてクランクシャフトW1を持ち上げて搬送する。
(もっと読む)
ロボットハンド
【課題】異なるワーク間でも製品形状を利用することでワーク把持部を共用化することができるロボットハンドを提供する。
【解決手段】シリンダブロックを把持するロボットハンドであって、所定の係合部材を設けた第一把持プレート部及び第二把持プレート部を具備し、前記各係合部材は、異なる形状を有する複数のシリンダブロック間において各シリンダブロックの被把持部の共通した位置にある係合可能部分を利用して係合する共通係合部材と、異なる形状を有する複数のシリンダブロック間において各シリンダブロックの被把持部の各シリンダブロック固有の位置にある係合可能部分を利用して係合するとともに、各シリンダブロックを把持した際に、当該シリンダブロックの被把持部と当該シリンダブロックと異なる形状を有するシリンダブロックの係合可能部分に係合するために用いられる係合部材とが干渉しないように設けられた専用係合部材と、からなる。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
半導体ウエーハ搬送用ハンド
【課題】ウエーハのノッチの位置合せを実行することができ、かつ、径の異なるウエーハを搬送した場合でも、ウエーハ処理装置に対するウエーハの中心位置を位置合せすることができる半導体ウエーハ搬送用ハンドを提供する。
【解決手段】容器からウエーハWを取り出し、ウエーハWを処理する処理装置に搬送する半導体ウエーハ搬送用ハンド10であって、ハンド部材本体12と、ハンド部材本体12に対して移動可能なハンド部材14と、ハンド部材14に対して移動可能な保持部材36と、ウエーハWと接触する第1回転部材24と、第1回転部材24と共にウエーハWを回転させる第2回転部材56と、第1回転部材24と第2回転部材56が相互に離間する方向又は相互に接近する方向に沿って同じ距離だけ移動させる移動手段と、ウエーハWのノッチを検出するノッチ検出手段と、を有する構成とした。
(もっと読む)
ロボットハンドのフィンガー部材、ロボットハンド、及び、それを有する物品移送機
【課題】フィルムキャップで被覆される被把持部を把持して移送するロボットハンド、及び、そのフィンガー部材について、フィルムキャップの切れなどの損傷を防止するための新規な構成を提案する。
【解決手段】樹脂製のフィルムキャップ60によって被覆されているビール樽4の被把持部5を把持するためのフィンガー部材2を有するロボットハンド1であって、前記フィンガー部材2の先端部に樹脂製の爪部材3を設け、前記爪部材3を被把持部5に対して当着させる構成とする。
(もっと読む)
物体入れ換え装置および物体移動装置
【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
環状部材の内周面に圧着される吊上げ冶具
【課題】従来は、ロボットアーム、又は装置付設のアームに設けた冶具本体に、チャック爪、又は爪を設け、このチャック爪、又は爪を、被製版ロール又はボビンに係止し、この被製版ロール又はボビンを吊上げる構造があった。この構造では、このチャック爪、又は爪に、被製版ロール又はボビンの重量が、全て掛かる構造である。従って、比較的、軽い物の吊上げには有効であるが、他の重量のある物には不向きと考えられる。
【構成】本発明は、ステータの空間部に挿入される棒状の吊上げ本体の放射方向に向って拡縮自在とする構造で、かつ平面視して吊上げ本体の三箇所に、基端部の側面が枢着された複数枚のプレートと、複数枚のプレートの自由端部の側面に枢着された複数枚のクランプ板と、複数枚のクランプ板の放射側側面の下端に設けた爪片で構成したステータの内周面に圧着される吊上げ冶具であり、ステータを、確実かつ安全に吊架できる。
(もっと読む)
燃料注入システム
【課題】簡素な構造で、燃料パイプに燃料を注入でき、かつ、燃料キャップを締め付けできる燃料注入システムを提供すること。
【解決手段】燃料注入システム1は、注入ガンと、先端フランジ面21が回転可能なロボットアーム20と、ロボットアーム20の先端フランジ面21に取り付けられた把持装置30と、これらを制御する制御装置40と、を備える。制御装置40は、注入ガンを把持装置30で把持して、注入ガンの吐出口を燃料パイプ53の先端に差し込んで燃料を注入するガソリン注入手段41と、注入ガンを燃料パイプ53から離して、把持装置30で燃料キャップを把持して、燃料キャップを燃料パイプ53の先端に当接させて、先端フランジ面21を回転させることにより、燃料パイプ53の先端に燃料キャップを締め付けるキャップ締め付け手段42と、を備える。
(もっと読む)
木材搬送装置
【課題】構造の簡素化を図り、製造コスト及びメンテナンスコストの軽減を実現し得る木材搬送装置を提供する。
【解決手段】木材2の長手方向に離間した少なくとも2つの部位を個別に保持する保持手段8を備え、当該保持手段8は、前記木材2をその長手方向と直角な方向から挿入可能な間隔で配設されると共に互いに平行を成す一対の棒状の保持部材13,13を有し、当該一対の保持部材13,13を、各保持部材13,13に平行な軸線Yを中心に一体的に回動可能に構成した。
(もっと読む)
ワーク運搬装置
【課題】回動可能なアームに連結されたフレームと、そのフレームに支持された第1乃至第3のクランプ装置とを有し、その第1乃至第3のクランプ装置によってワークを把持して運搬するワーク運搬装置において、1台のワーク運搬装置によって、各種形態のワークを運搬できるようにする。
【解決手段】第1及び第2のクランプ装置9,9Aを互いに接近又は離隔可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのクランプ爪14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
基板検査装置
【課題】真空吸着状態が切れても基板の健全性を維持し、検査時に発見した基板の裏面の汚れ等をクリーニングすることを可能にする。
【解決手段】基板Aの少なくとも裏面の目視検査を行うための基板検査装置1であって、基板Aの裏面を真空吸着する吸着保持部6と、該吸着保持部6により吸着された状態の基板Aの外周縁に接触して半径方向に挟む複数の接触部10を有する押圧保持部8とを備える基板検査装置1を提供する。
(もっと読む)
ドア開き用ロボットハンドおよびロボット
【課題】 簡単な構造でドアを開くことができるロボットハンドを提供する。
【解決手段】
ロボットハンド1は、ノブ101付きのドア100を開くために用いられる。このロボットハンド1は、ハンド本体と、ハンド本体に回転可能に支持され、外周面がノブ101の外周面に当てられる回転体20と、回転体20をノブ101に当てた状態で回転させることにより、ノブ101を、ドア100のラッチ状態を解除する方向に回転させるモータを備えている。さらにロボットハンド1は、回転体20の外周面から径方向、外方向に突出するようにしてハンド本体の先端に設けられた係止爪41を有している。この係止爪41は、回転体20が上記ノブ101に当たっている状態で、ノブ101とドア100との間に挿入され、ノブ101の裏面に係止される。上記ラッチ解除後に、係止爪41がノブ101に係止された状態でロボットハンド1を後退させることにより、ドア100を開くことができる。
(もっと読む)
1 - 20 / 51
[ Back to top ]