
Fターム[3C007EV11]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形する当接部 (142)
Fターム[3C007EV11]の下位に属するFターム
流体圧の利用 (26)
バネの利用 (27)
弾性膜(開空間、閉空間、充填空間あり) (45)
ブラシの利用
複数突起 (13)
Fターム[3C007EV11]に分類される特許
1 - 20 / 31
人間型ハンド
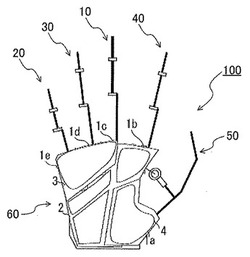
【課題】実用性を高めた簡潔構造の人間型ハンドを提供することである。
【解決手段】手の骨格を有する人間型ハンド100において、前記人間型ハンド100の掌骨格に複数の掌部2、3、4を固定し、前記複数の掌部2、3、4のそれぞれが、シート部材21、31、41に弾性部材22、23、24、32、42を貼付して成り、前記人間型ハンド100によって対象物を掴む際に、前記複数のシート部材2、3、4同士が重なり合うとともに該シート部材21、31、41が撓んで、前記弾性部材22、23、24、32、42が前記対象物を支持することを特徴とする。
(もっと読む)
形状自在な吸着グリッパとこれによる把持方法

【課題】ワークの形状及び大きさによらずに確実にワークを把持することを可能とする吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12とを有し、中空バッグ12aは、把持部12を鉛直下向きにした場合において中心部を鉛直方向に貫通した減圧空間17と減圧空間17を取り囲む中空バッグ内部空間とを有し、かつ、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、さらに、減圧空間17及び中空バッグ内部空間の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9を有する。
(もっと読む)
グリッパ
【課題】 小型化を図ることが可能なグリッパを提供すること。
【解決手段】 駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換する把持部材と、を具備し、上記把持部材は反転にて形状安定なポジションを少なくとも2個持つものであり、それによって、簡単な構成で小型のグリッパを提供することができ、又、ギヤやカム等を使用した構成ではないので、摩擦もなく摩擦ロスによる機械効率低下も少ない。又、把持部材は少なくも2つの安定な形状を保持しているので、切り換えるときのみ通電すればよく、駆動源に対する通電時間を短くすることができる。
(もっと読む)
マニピュレータ装置およびマニピュレータの制御方法
【課題】先端部の形状を有効に利用して把持する物体の姿勢制御を行うことができるマニピュレータ装置および制御方法を提供する。
【解決手段】各先端アーム20,30の先端には、先端アーム本体52,72に対して捻転可能であり、物体に当接可能な凸曲面状の先端曲面部53,73を備える。第一駆動手段54a,54b,74a,74bにより、先端アーム本体52,72の基部に対する位置、姿勢の変更により、先端曲面部53,73の物体との接触位置における先端アーム軸に対する接触角度を変更できる。第二駆動手段54c、74cにより、先端アーム本体52,72に対する先端曲面部53,73の先端アーム軸周りの捻転角度を変更できる。制御手段2は、接触角度を変更すると共に捻転角度を変更することにより、接触角度に応じた物体の動作を物体に行わせる。
(もっと読む)
ロボットハンド用撮像装置内蔵フィンガ
【課題】発光手段を用いなくとも対象物との接触部位を撮像することのできるロボットハンド用撮像装置内蔵フィンガを提供することにより、コストの低減を図ることを課題とする。
【解決手段】対象物10を把持することで変形する弾性外皮12と、弾性外皮12を支持するフィンガ本体11と、フィンガ本体11の内部に設けられて弾性外皮12の変形状態を撮像する撮像装置13とを有する。さらに、ロボットハンド用撮像装置内蔵フィンガ101において、フィンガ本体11は、外部から撮像装置13の撮像範囲F1に光を導入する光透過部11及び12を備える。
(もっと読む)
つかみ装置
【課題】伸縮袋体の寿命を長くできるとともに、伸縮袋体の外周面とワークの内周面との接触面積を十分に確保でき、把持性能に優れたつかみ装置を提供することを目的とする。
【解決手段】両端開放の筒状のチューブ31と、棒状又は筒状のボディ2とを有し、給排空間15内に流体Fを供給してチューブ31を伸長させてチューブ31の周面とワーク23の周面とを接触させることでワーク23をつかむとともに、当該給排空間15内の流体Fを排出してチューブ31の周面とワーク23の周面との接触を解除させることでワーク23を離すつかみ装置1において、チューブ31が、チューブ本体とチューブ本体の外周面37に取付けられた接触面体とにより形成され、接触面体は、流体Fが給排空間15内に供給された場合に外面全体がワーク23の内周面13と面接触する。
(もっと読む)
ガラス基板搬送用ロボットハンド
【課題】安価でメンテナンスが容易なガラス基板搬送用ロボットハンドを提供する。
【解決手段】櫛歯状の本体に平面状にガラス基板保持部を配置し、ガラス基板保持部上にガラス基板を載置してガラス基板を搬送するロボットハンドにおいて、ガラス基板保持部にOリングの半径方向をガラス基板と垂直になるようにOリングを配置し、Oリングを円周方向に回転させる回転機構と、Oリングを回転させた位置で固定する固定機構とを有し、Oリングの外周面をガラス基板と接触させてガラス基板とOリングの外周面の間の摩擦力によりガラス基板を保持して搬送することを特徴とするガラス基板搬送用ロボットハンド。
(もっと読む)
グリッパ及びマニピュレーションシステム
【課題】取り扱う対象物の変形を抑制すること。
【解決手段】グリッパ1は、基部6と、基部6に取り付けられる温度調整手段2と、温度調整手段2に取り付けられる対象物保持部4と、対象物保持部4に設けられる温度応答性ポリマー5と、温度応答性ポリマー5の温度を検出する温度検出手段3とを含む。温度応答性ポリマーは、温度に応答して構造を変化させる高分子材料であり、ポリ(N−イソプロピルアクリルアミド)が用いられる。温度調整手段2は、温度応答性ポリマー5の温度を変化させることにより、グリッパ1が保持する対象物を対象物保持部4に保持し、又は前記対象物を対象物保持部4から解放する。
(もっと読む)
グリッパ装置およびその構築モジュール
【課題】機械的手段によって弾性的に変形可能であると共に、物品および物体をしっかりと掴むのに適した空気式制御グリッパ装置を提供すること。
【解決手段】支持体のジオメトリ軸の周囲に、平行かつ角度的に離間されて位置決めされた複数のグリッパモジュールを保持する支持体と、各モジュールは、筐体の一側面に沿って半径方向スロット18に沿った外弧を有し、アクチュエータピストンが係合するアーチ形の可撓性適把握要素21を備える。すべての適把握要素は、外弧が各スロット内に退避した収縮解除静止状態と、外弧が前記半径方向スロットから突出して、掴む対象の物品、物体、またはケースに係合する圧縮/収縮作業状態との間で可動である。
(もっと読む)
ハンド機構
【課題】本発明は、被把持面が曲面状の物品を把持するハンド機構であって、様々な大きさの被把持面に対応しつつ安定して物品を把持可能なハンド機構を提供することを目的としている。
【解決手段】本発明は、物品を把持するハンド機構であって、直接的又は間接的に物品に接触する一面を有する弾性部材からなる変形部と、前記一面と相対する前記変形部の他面の中心線に接する状態で配置された剛性の高い支持部と、前記支持部が固定された固定部と、前記固定部を物品の方向へ移動させ所定の力で前記変形部を物品へ押圧し変形せしめることにより物品を把持するハンド機構である。
(もっと読む)
物体を狭持する人工ハンドの指構造及び物体の人工ハンド狭持方法
【課題】様々な形状の物体、特に床面等に密着した紙等の薄い物ならびにクリップ等の小さく且つ端面が曲面である物を安定性良く把持することが可能で、簡単な構成要素の人工ハンドの指構造と人工ハンド狭持方法を提供すること。
【解決手段】二本の指の少なくとも一方の指を動かして平面に載置された物体を狭持する人工ハンドの指構造であって、前記一方の指1は、前記物体に当接される先端部に前記物体を掬い上げる凹曲面部12を持ち、他方の指2は、前記物体に当接される先端部に前記物体を押圧する凸曲面部22を持つ、ことを特徴とする。
(もっと読む)
ロボットハンド
【課題】平面上に載置された物体を持ち上げるように把持する把持動作を、適切に行うことを可能とするロボットハンドを提供すること。
【解決手段】物体を把持するための屈曲動作を行う指本体を備えるロボットハンドにおいて、指本体の先端部に弾力性を備える薄板状の爪部を取り付けるとともに、この爪部を、指本体の先端部の腹部側に取り付けることで、指本体が屈曲動作を行って物体を把持する際に、爪部により指本体が物体の底面と平面との間に挿入可能とし、把持動作を行うことができるようにした。
(もっと読む)
セラミックス柱状体用移載装置及びセラミックス柱状体の移載方法
【課題】長尺で真直度の悪いセラミックス焼成体をロボットで移載するに際し、応力集中等によるクラックの発生や破損が起こり難い手段を提供すること。
【解決手段】球面及び平面を呈する緩衝材で構成される複数の当接パッド52a,52bをパッド用枠体42a,42bに支持をするとともに弾性機構72a,72bを備える当接パッドシャフト62a,62b、及び、その当接パッドシャフト62a,62bが弾性機構72a,72bによって外部圧力を吸収した状態を保持する状態保持機構82a,82bを備える一対のグリッパユニット22a,22bと、その一対のグリッパユニット22a,22bの間隔を調整する間隔調整機構32と、で構成されるグリッパ12を具備するセラミックス柱状体用移載装置の提供による。
(もっと読む)
ロボットハンド
【課題】物を安定して把持できるロボットハンドを提供すること。
【解決手段】本発明に係るロボットハンドは、掌リンク20と、掌リンクに連結される複数の指リンク10とを有する。指リンク10及び掌リンク20における物を把持する面の少なくとも一部に、柔軟性を有する材料から把持面が形成され、当該把持面のうち、掌リンクの把持面の摩擦係数を1.7以下とし、かつ掌リンクの把持面の摩擦係数が指リンクの把持面の摩擦係数以下とする。その摩擦係数を調整するために、把持面の表面に微小な凹凸を設けている。指リンク10は、掌リンク20に連結される根本側リンク11と、根本側リンク11に連結される指先側リンク12とを有する。
(もっと読む)
ロボット
【課題】本発明は、高精度の把持と柔軟な把持を同一の機構で実現するとともに、対象物との密着性も十分確保し、対象物の種別によらず安定な把持が可能となるロボットを提供する。
【解決手段】複数個のリンク4と、前記リンク4を連接する関節とからなるリンク連接機構と、指部5を備えたロボットにおいて、前記指部5は、第1の部材7と、前記第1の部材7よりも剛性が低い少なくとも1つの部材を備えたものである。
(もっと読む)
把持装置
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
マニピュレータおよびロボット
【課題】機構や制御アルゴリズムを単純にしつつも、様々な形状の物体を確実に把持することができるマニピュレータを提供する。
【解決手段】複数の関節軸111,112,113及び複数のリンク131,132,133を有し、複数の関節軸111,112,113の回転角が一定の関係を保つように複数のリンク131,132,133が連動して閉じる方向に動く指1と、指1と対向して配置され、複数の関節軸211,212,213及び複数のリンク211,212,213を有し、複数のリンク231,232,233のうち根元側のリンク231から順に閉じる方向に動き、且つ根元側のリンク231が物体に接触すると、根元側のリンク231に隣り合うリンク232が閉じる方向に動く指2と、指1及び指2を駆動する駆動源100,200を備える。
(もっと読む)
チャック装置
【課題】被挟持物を安定して挟持できるチャック装置を提供する。
【解決手段】ロボットハンドに取り付けられるチャック装置は、金属で形成される金属フィンガー41aと樹脂で形成される樹脂フィンガー41bとを有するフィンガー部40を備えている。よって、フィンガー部40でワーク91を挟持する場合、金属フィンガー41aは変形しないのに対して、樹脂フィンガー41bは挟持力によって弾性的に曲がる部分BNが生じる。このように樹脂フィンガー41bが弾性変形することによりワーク91をソフトに挟持できるため、金属同士のフィンガーでワークを挟持する場合のようにフィンガーとワークとが点接触とならず、ワーク(被挟持物)を安定して挟持できる。
(もっと読む)
容器類の掴み装置
【課題】ゴム状弾性体の先芯付近、及び後端付近における破損を防止し、掴み装置の耐久性を向上する。
【解決手段】先芯の背面を、断面が上に凸の曲線となっているR状斜面10とすることで、当該部分の接着剥離が無くなり、先芯付近のゴム状弾性体2に発生する応力が小さくなり、破損が減少する。また、ゴム状弾性体2の後端付近(鍔状部の直ぐ先端寄り部分)外周に環状凹溝14を形成することで、容器口部と擦れ合うことによる弾性体材料の摩耗又は劣化が無くなり、後端付近の破損が減少する。
(もっと読む)
加工物移送装置
1つ以上の加工物、例えば、半導体ウエハを操作するための加工物移送アセンブリは、加工物の外径に対応する1つ以上の弓状部分を含む。この弓状部分は、加工物の外端に係合する加工物係合表面を有する;少なくとも1つの協働アームが、加工物の係合表面から加工物の外端部上に加わる圧力に応じて、加工物から離れる方向に加工物係合表面の変形を可能にするたわみアセンブリを含む。 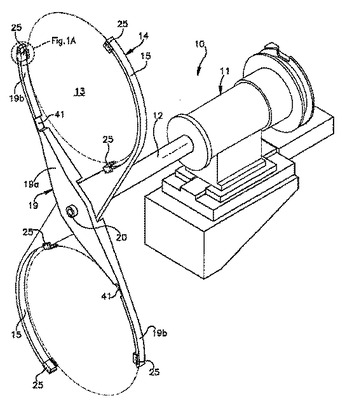 (もっと読む)
(もっと読む)
1 - 20 / 31
[ Back to top ]