
Fターム[3C007EV27]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 付加機能を有するもの (310) | 物品を挟持したまま回転させるもの (51)
Fターム[3C007EV27]に分類される特許
1 - 20 / 51
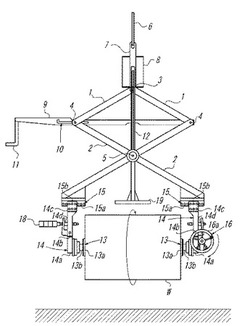
トング式吊具
【課題】
ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するトング式吊具について、装置構成が小型,簡素であるという利点が損なわれず、ワークの吊持作業の安全性が確保されるようにする。
【解決手段】
ワークWの自重を利用したリンク機構の回転動作でワークWを挟込んで吊持するものである。相対してワークWを挟込む挟込支持部13がリンク機構を構成するトングアーム2の下部にそれぞれ回転可能に取付けられている。一方のトングアーム2には、一方の挟込支持部13を回転駆動する回転駆動部16が取付けられている。回転駆動部16は、手動の操作ハンドル16aで回転操作されるウオームギア16b,ウオームホイール16cのギア噛合構造からなる。
(もっと読む)
敷ブロックの配置方法、敷ブロック移動用工具、および、その工具を備えた工作機械

【課題】作業者の安全性確保、機械および敷ブロックの破損防止および設置精度の向上に加え、敷ブロックの姿勢変更も容易に行うことができる敷ブロックの配置方法。
【解決手段】敷ブロック1をスピンドル30が保持可能な範囲内のブロック格納エリア28Aに設置しておくブロック準備工程と、スピンドルに装着される主軸装着部、敷ブロックを保持するブロック保持部14およびブロック保持部を水平な旋回軸を中心に旋回させる旋回機構15を有する敷ブロック移動用工具10をスピンドルに装着する工具装着工程と、相対移動により、敷ブロック移動用工具によって敷ブロックをテーブル28のワーク載置位置に配置するブロック配置工程とを備え、ブロック配置工程は、敷ブロックを保持した状態で、敷ブロックの姿勢を変更する動作を含む。
(もっと読む)
把持装置及びロボット装置
【課題】一対のフィンガーの把持動作に用いられる回転駆動源を、一対のフィンガーの回転駆動に兼用する。
【解決手段】モータ5は、フレーム6から回転軸5bが突出するようにフレーム6に収容されている。回転軸5bには、ピニオン7が固定されている。また、フレーム6に対してグリッパ基台12が回転可能に設けられている。一対のラック10,10が、グリッパ基台12に支持されて、ピニオン7を間に挟んでピニオン7に噛み合っている。一対のラック10,10には、フィンガー4,4が固定されている。フレーム6には、グリッパ基台12の回転を規制するロック機構14が設けられている。ロック機構14は、一対のラック10,10の移動が規制されると、グリッパ基台12への係止が解除され、グリッパ基台12の回転が許容される。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法
【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
試料加工装置
【課題】本発明の課題は、微小試料片およびまたはその周辺領域を汚染することなく、確実で安定的な微小試料片の分離、摘出、格納を行う装置および方法を提供することにある。
【解決手段】試料基板から観察すべき領域を含む試料片をイオンビームスパッタ法により分離し、試料を押し込んで保持し、引き抜いて分離するための、根元に比較して先端が細く、該先端部が割れている形状で、該形状により得られる試料片を保持する部位の弾性変形による力で試料片を保持する棒状部材からなるはり部材を用いて、前記試料片を試料基板から摘出し、試料片を載置するための載置台上へ移動させた後、前記はり部材と前記試料片を分離することで該試料片の格納を行う。
(もっと読む)
ロボットハンド
【課題】ワークチャック装置のチャック位置にワークを自動で精度良くセットできるロボットハンドを提供すること。
【解決手段】ロボットアームに装着されるものであって、3個以上のハンド爪14によりワーク10の内周又は外周を把持し、ワークチャック装置のチャック位置にワーク10を挿入させるロボットハンドにおいて、3個以上のハンド爪14に把持されたワーク10が軸心を中心とする回転方向に外力を受けた場合に、ワーク10を自由に回転させる自由回転機構を有する。
(もっと読む)
チャック及びロボットハンド
【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
マニピュレータ装置およびマニピュレータの制御方法
【課題】先端部の形状を有効に利用して把持する物体の姿勢制御を行うことができるマニピュレータ装置および制御方法を提供する。
【解決手段】各先端アーム20,30の先端には、先端アーム本体52,72に対して捻転可能であり、物体に当接可能な凸曲面状の先端曲面部53,73を備える。第一駆動手段54a,54b,74a,74bにより、先端アーム本体52,72の基部に対する位置、姿勢の変更により、先端曲面部53,73の物体との接触位置における先端アーム軸に対する接触角度を変更できる。第二駆動手段54c、74cにより、先端アーム本体52,72に対する先端曲面部53,73の先端アーム軸周りの捻転角度を変更できる。制御手段2は、接触角度を変更すると共に捻転角度を変更することにより、接触角度に応じた物体の動作を物体に行わせる。
(もっと読む)
ロボットアームの制御方法
【課題】グリッパハンドとカメラとの位置関係を維持し、障害物付近の作業性の低い領域でもカメラと障害物との衝突を回避して作業することができるロボットアームの制御方法を提供する。
【解決手段】各リンク11B,11C,11D,12の動作でグリッパハンド2が移動する予定のハンド移動予定位置と、各リンク及びグリッパハンド2の動作でカメラ3が移動する予定のカメラ移動予定位置とを計算する。次に、作業台7の平面と平行な平面を基準面とし、カメラ移動予定位置が基準面を境に作業台7が配置されている側の空間領域に含まれるか否かを判断する。カメラ移動予定位置が上記空間領域に含まれると判断された場合、カメラ移動予定位置が上記空間領域から外れるようにグリッパハンド2の回転方向とは反対方向に360/N度単位でカメラ3の回転角度を設定することでカメラ移動予定位置を変更する。
(もっと読む)
被把持体の把持装置
【課題】本発明は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸が配置される前記被把持体の被把持面を把持する把持部と、前記被把持体の端面が当接する当接部を有する把持装置において、被把持体を所望の姿勢で把持可能なコンパクトな被把持体の把持装置を提供することを目的としている。
【解決手段】本発明に係わる被把持体の把持装置は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸を位置決めすべき前記被把持体の被把持面を開閉して把持する把持部と、前記被把持体の端面が当接する当接部と、前記被把持体の端面と前記当接部を離接させるとともに前記当接部と前記被把持体の端面との間に所定の間隙を形成する間隙形成部とを有することを特徴とする被把持体の把持装置である。
(もっと読む)
プラグ長手方向二点把持ハンド装置
【課題】ロボットと組み合わせたハンド装置によりプラグを着脱する際、プラグサイズによらず、プラグの軸心を回転中心に一致させてプラグを把持するプラグ平行把持が可能なハンド装置を提供する。
【解決手段】プラグ1の根元部を把持する複数の主クランプ2と、プラグの胴部を把持する複数の副クランプ13と、両クランプ2、13を開閉可能に保持するケーシング15と、ケーシングに一側が直結されかつプラグ回転モータ9に他側が連結された回転軸5と、回転軸を軸受けで支持するとともにプラグ回転モータを搭載したハンドフレーム10と、を有し、ハンドフレームが、ハンドスライド11を介して前進・後退可能にロボットアーム31に取り付けられているプラグ長手方向二点把持ハンド装置。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
電動ピンセット
【課題】 電動でピンセットの把持部を閉成状態で回転させると共に、該回転量及び開閉量を調整可能なこと。
【解決手段】 電動ピンセット1は、スイッチ33を動作すると、モータ31を第1方向へ回転してカムフォロワ55が並進移動してピンセット20が開放から閉成した後、スイッチ33を動作すると、モータ31を第1方向へ回転して伝達部70及び回転部80を回転してピンセット20を閉成状態で、ピンセット20の結合部22c及び端部21a,22aを回転させるものである。
(もっと読む)
1 - 20 / 51
[ Back to top ]