
Fターム[3C007EV30]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 非接触式 (11)
Fターム[3C007EV30]に分類される特許
1 - 11 / 11
薄板状物の把持装置、および薄板状物の把持方法
【課題】
摩擦による塵埃の発生及び飛散を抑制し、従来の搬送ハンドからの置き換えが容易に且つ安価に出来、軽量で、かつ狭隘な場所にもアクセス可能な薄型の把持装置を提供すること。
【解決手段】
把持装置22は、内部に圧縮気体流通のための流路36と、圧縮気体を噴出させる噴出口30を有する搬送フィンガ23と、搬送フィンガ23先端に固定された第1の把持部材26と、駆動手段28によって動作させられる第2の把持部材29とを具えている。圧縮気体の噴出力によって浮上させられた薄板状物の周縁部を、第1の把持部材26と第2の把持部材29とで、位置ずれ補正を行いながら把持する。
(もっと読む)
物品搬送装置

【課題】ファンを用いて物品を搬送する物品搬送装置において、物品に関わる検出器を可及的に減らせるようにする。
【解決手段】移載装置1、非接触でガラス基板を搬送する装置である。移載装置は、ケース22と、ファン24と、吹き出し口28と、電流値測定部と、ファン制御部30と、を備えている。ケース22は、ガラス基板に対向する物品対向部42を有している。ファン24は、ファンケース54の内部に設けられている。吹き出し部は、物品対向部42に設けられ、ファン24との間で空気を流す。電流値測定部は、ファン24の負荷を検出する。ファン制御部30は、電流値測定部の検出結果によりファン24を制御する。
(もっと読む)
基板搬送装置および基板搬送システム
【課題】基板カセットと基板受け渡し先との間でガラス基板の受け渡しを効率良く行うことのできる廉価でコンパクトな構成の基板搬送装置を提案すること。
【解決手段】基板搬送装置2は、ガラス基板7の縁端をクランプしエアー浮上させた状態で、基板カセットからガラス基板7を引き抜くので、狭い間隔で高密度に収納されているガラス基板を引き抜くことができ、エアー浮上状態でガラス基板7を移動させるので、ガラス基板に損傷、異物付着が生じない。基板載置面に引き込まれたガラス基板を基板支持アームで支持し、この状態で基板搬送装置2が収納先の基板カセットまで移動し、基板支持アームによってガラス基板を引き渡し先に渡す。一台で基板カセットからのガラス基板の引き抜き、移送、基板受け渡し先への引き渡しを行うことができ、設置スペースが少なくて済む廉価でコンパクトな基板搬送システムを構築できる。
(もっと読む)
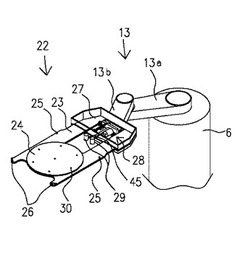
基板移送ロボット
【課題】ガラス基板の移送時に、基板表面を損傷することなく安全に移送するための基板移送ロボットを提供すること。
【解決手段】基板(11)を移送するためのロボットアーム(10)と、当該ロボットアーム(10)から前記基板(11)を浮上させる浮上部(20)と、当該ロボットアーム(10)に装着されて前記基板(11)の重量を支持する基板支持部(30)とを含み、ガラス基板の移送時に、基板表面を損傷することなく安全に移送するための基板移送ロボットが提供される。
(もっと読む)
小片部材の運搬装置およびその運搬方法
【課題】小片部材を浮上させて安定保持し運搬すること出来る運搬装置およびその運搬方法を提供する。
【解決手段】気体の噴出により小片部材を浮上させて所定の位置へ運搬する小片部材の運搬装置であって、小片部材の外周近傍を小片部材の厚さ方向に移動可能に配置されるとともに先端付近の側面に設ける気体噴出孔を有する気体噴出体と、気体噴出体を小片部材の外周部の近傍に移動させた状態において、気体噴出孔から小片部材の下面側に気体を噴出して小片部材を浮上させる小片部材浮上手段と、気体噴出体により小片部材を浮上支持した状態で気体噴出体を所定の位置に移動させることにより小片部材を所定の位置に運搬する運搬手段と、所定の位置で噴出する気体を停止して小片部材を落下させる小片部材落下手段とを備える。
(もっと読む)
超音波浮揚装置及びそれを備えた搬送ロボット
【課題】シリコンウェハなどの物体を非接触浮上させる超音波浮揚装置とロボットを組み合わせた搬送ロボットが提案されているが、この浮揚装置は、縦方向の体積が大きく、作業内での干渉の問題があった。浮揚装置の縦方向の体積が大きくなる原因は、超音波振動子の縦振動を利用している点にあった。
【解決手段】超音波振動子101と、超音波振動子101の音波振動を伝達するホーン105と、ホーン105に接続されて振動し、音波の放射圧によって物体を浮揚させる振動体106と、を備えた超音波浮揚装置において、ホーン105は、音波振動の波の節の位置において波が伝わる方向と直交する方向に延長された部分が形成され、延長された部分の先端に振動体106が接続される超音波浮揚装置とした。
(もっと読む)
部品保持装置及び部品配置装置
【課題】複雑な機構や構造を用いることなく、部品を非接触で位置決め保持する。
【解決手段】超音波振動を発生する保持面が水平方向に対向配置される、少なくとも2つの超音波振動子203を設け、該超音波振動子203の保持面の間で、部品118を超音波振動により非接触で挟持する。この部品保持装置を、部品ホルダ200内に積層された部品118を分離するための部品セパレータの出口や、部品118を移載するためのヘッド113のチャック機構に配設することができる。
(もっと読む)
把持装置、及び、ハニカム構造体の製造方法
【課題】 ハニカム構造体を適切な姿勢で把持し、所定の位置に簡便に搬送して載置することができる把持装置を提供すること。
【解決手段】 本発明の把持装置は、回転軸が平行となる少なくとも2個の支持ローラを有する第一の把持部と、上記第一の把持部の支持ローラに対向する少なくとも1個の支持ローラを有する第二の把持部と、上記第一の把持部及び上記第二の把持部を有する少なくとも1つの把持機構とを備え、上記第一の把持部の支持ローラの回転軸と上記第二の把持部の支持ローラの回転軸とは平行になっており、上記第一の把持部及び上記第二の把持部の少なくとも一方を移動させることにより、上記支持ローラを介して上記第一の把持部と上記第二の把持部との間に被把持物を把持することを特徴とする。
(もっと読む)
板材の把持装置
【課題】本発明は、異なる大きさの板材を把持することができる板材の把持装置を提供することを課題とする。
【解決手段】板材を吸引保持する把持機構40をロボットアームなどの移動機構28に装着して、ワーク49を把持する板材の把持装置30において、把持機構40は、ワーク49の上面を吸引する吸引部66と、ワーク49の大きさに合わせてワーク49の上面又はワーク49の上面及び側面を受ける受部73L、73L、73R、73Rと、これらの受部73L、73L、73R、73Rをワーク49の大きさに合わせて移動可能とする受部移動機構101と、ワーク49の側方に開閉動作し、ワーク49の側面と下面とを支持可能とする把持爪75L、75L、75R、75Rと、この把持爪75L、75L、75R、75Rをワーク49の大きさに合わせて移動可能とする把持爪移動機構99とを備える。
(もっと読む)
トランスファロボット
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
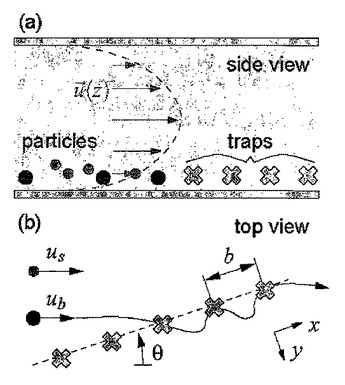
光学分別装置および光学分別方法
光学トラップの静的アレイは微視的な対象物をサイズに対して指数関数的な感度で仕分けするために使用することができる。斯かる光学分別は外力と移動する対象物の光学傾斜トラップに対する異なる親和性との間の競合に基づくものである。逆分別法では、トラップの影響をより強く受ける対象物はアレイに動力学的に固定されやすくなり、意図的に入力フローに曲げ戻される。サーマル・ラチェット法では、パタンは粒子が拡散できるよう間隔が置かれ、それらのパタンの中を前方または後方に移動する機会が与えられる。他の仕分け技術と異なり、光学分別は連続的に機能することができ、連続的に最適化可能である。また指数関数的感度は、事実上、一般的にポテンシャルウェルの見掛け幅の粒子サイズ依存性から生じる。
 (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]