
Fターム[3C007FS01]の内容
マニピュレータ、ロボット (46,145) | 吸着装置単体の形態 (580) | 真空吸着 (505)
Fターム[3C007FS01]の下位に属するFターム
真空源を有さないもの (9)
エゼクタ (13)
ベルヌイチャック (77)
Fターム[3C007FS01]に分類される特許
1 - 20 / 406
自動作業装置
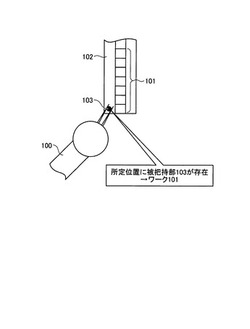
【課題】ワークの種別を自動的に判別する自動作業装置のコストを抑えること。
【解決手段】ワークを把持したか否かを検知するセンサを備えたロボットハンドへ作業対象となるワークを供給する供給容器に、ワークの種別を示す被把持部を予め設けておき、作業の開始前に、ロボットハンドによって供給容器の被把持部を把持させる模擬動作を行い、ロボットハンドによる被把持部の把持位置および把持結果に基づいてワークの種別を判別するように自動作業装置を構成する。
(もっと読む)
形状自在な吸着グリッパとこれによる把持方法

【課題】ワークの形状及び大きさによらずに確実にワークを把持することを可能とする吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12とを有し、中空バッグ12aは、把持部12を鉛直下向きにした場合において中心部を鉛直方向に貫通した減圧空間17と減圧空間17を取り囲む中空バッグ内部空間とを有し、かつ、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、さらに、減圧空間17及び中空バッグ内部空間の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9を有する。
(もっと読む)
フィルム吸着装置
【課題】フィルムの引き離しを容易に行うことができるフィルム吸着装置の提供。
【解決手段】フィルムAの上面を吸着するフィルム吸着装置1であって、長さ方向に複数の圧力室12を有すると共に、複数の圧力室12とそれぞれ独立して連通し且つ上記長さ方向の両端部の間において膨出した吸着面10aを有する真空チャック10と、吸着面10aをフィルムAの上面に対して上記長さ方向の両端部のうち一方の端部から他方の端部まで順次接触させるハンド装置と、を有するフィルム吸着装置1を採用する。
(もっと読む)
ノズル及びその製造方法
【課題】短時間で製造可能なノズル及びその製造方法を提供することである。
【解決手段】ノズル10は、チップ部品20を吸着するための吸着面Sであって、凹曲面をなしている吸着面Sを有する。吸着面Sには、吸引孔Hが設けられている。吸着面Sを平面視したときに、吸着面Sの底部を中心とする円Bと底部を通過する2本の直線L1,L2とが交差する交差部A1〜A4が、円B上の交差部A1〜A4以外の部分に対して窪んでいる。
(もっと読む)
フィルム吸着装置
【課題】フィルムの剥がれに強く、安定した吸着ができるフィルム吸着装置の提供。
【解決手段】フィルムAを真空吸着する吸着面10aを有する第1の吸着部10と、負圧室25内部を通風する空気流れを形成する空気導入口26及び空気導出口27を有すると共に、フィルムAが剥がれた時にできる隙間を流れる空気のエジェクタ効果による負圧によって、第1の吸着部10による第1の吸着領域とは異なる第2の吸着領域におけるフィルムAを吸引する開口部22を有する第2の吸着部20と、を有するフィルム吸着装置1を採用する。
(もっと読む)
樹脂成形品の把持装置
【課題】樹脂成形品の把持装置において、樹脂製形品の把持不良を抑止し、かつ吸着部品による擦り傷等の発生を抑止すると共に、三次元的に複雑な表面形状の多種類の樹脂成形品にも対応可能とし、かつ当該装置の小型化及びコストダウンを図る。
【解決手段】当該装置の長さ方向に移動可能な垂直ロッド17の一端側の支持部材18は、係止部材35により垂直ロッド17に固定可能であり、他端側の支持部材18はシリンダ19により昇降自在であり、中央バキュームハウジング32及び外側バキュームハウジング12の表面には可撓性の当接部材32がそれぞれ配設され、かつ内部にはマニホールドがそれぞれ形成され、各バキュームハウジング12,31の当接部材32には、各マニホールドに連通すると共に樹脂成形品Wの表面に向けて開口する複数の開口32aがそれぞれ開設される。
(もっと読む)
配線基板搬送用治具、配線基板の製造方法
【課題】吸引時の配線基板の姿勢を安定させることにより、配線基板への吸引部の接触を確実に防止することができる配線基板搬送用治具を提供すること。
【解決手段】本発明の配線基板搬送用治具11は吸引部20を備える。吸引部20には、凹部の内周面にて開口するエア吹出穴が設けられる。また、配線基板搬送用治具11には、エア吹出穴にエアを供給するエア流路221が設けられ、エア流路221上には、作業者によって操作されるスイッチ部51が設けられる。スイッチ部51には、エア流路221が延びる方向とは直交する方向に長い断面形状を有する貫通孔61が設けられる。なお、貫通孔61がエア流路221と連通しない操作位置であれば、エア流路221を閉鎖する閉鎖状態となり、貫通孔61がエア流路221と連通する操作位置であれば、エア流路221を開放する開放状態となる。
(もっと読む)
吸着装置及びロボットシステム
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
真空吸着装置
【課題】大型で歪みの大きい加工材料を容易に吸着することができ、且つ加工応力に耐えうる保持力も確保することができる真空吸着装置を提供する。
【解決手段】被加工物30に対して進退可能に設けられ、減圧または粘着によって上記被加工物の表面を係着させる第1の係着部材15と、この第1の係着部材の周りを囲む如く形成され、上記被加工物における上記第1の係着部材による係着部の外側周囲部分を減圧によって係着させる第2の係着部材17とを備えたことを特徴とする。
(もっと読む)
板状ワークの取扱方法
【課題】 切断後の板状ワークをより円滑に持ち上げることのできる、板状ワークの取扱方法を提供すること。
【解決手段】 板状ワークの取扱方法は、面状に配列された複数の吸着パッドで吸引して板状ワークを取り扱う。板状ワークの取扱方法では、複数の前記吸着パッドを前記板状ワークに向けて降下させると共に、複数の前記吸着パッドのうちの第1領域内の吸着パッドでの吸引を開始し、複数の前記吸着パッドが前記板状ワーク面に達した時又は達した後に、複数の前記吸着パッドのうちの前記第1領域よりも広い第2領域内の吸着パッドでの吸引を開始し、複数の前記吸着パッドを上昇させて前記板状ワークを持ち上げる。
(もっと読む)
吸着部材、ピックアップ装置およびピックアップ方法
【課題】半導体チップへの静電気によるダメージを十分に防ぐことができ、既存の半導体チップに幅広く適用することができる吸着部材を提供する。
【解決手段】半導体チップ20に接触させるための接触面11aと、接触面11aにつながる側面11cとを有する吸着部11と、側面11cから外方向に向かって突き出る第1放電部12とを備える。
(もっと読む)
ウエハ搬送用アームとウエハ搬送装置
【課題】本発明は、ウエハを真空吸着して所定のウエハの搬送を終えた後に、ウエハをウエハ吸着部から容易に離脱させることができるウエハ搬送用アームとウエハ搬送装置を提供することを目的とする。
【解決手段】本願の発明にかかるウエハ搬送用アームは、非弾性体で形成され、開口を有するウエハ吸着部と、該ウエハ吸着部と接続され、該開口に通じる吸気路を有する支持部と、を備えたことを特徴とする。
(もっと読む)
ピッチ変換移載装置
【課題】複数個のワーク間のピッチを変換して移載する際に、簡単な機構でワークを移載することができるピッチ変換移載装置を提供する。
【解決手段】駆動部10により回転させられるシャフト20と、シャフト20に沿って配列されワーク101を個々に保持する複数の搬送ヘッド30と、シャフト20の回転に伴ってシャフト20から伝達される回転運動を、その軸方向と平行な方向の直進運動に変換して、搬送ヘッド30のうちの少なくとも基準となる搬送ヘッド30を除く他の搬送ヘッド30をシャフト20に沿って移動する方向変換機構40とが設けられ、他の搬送ヘッド30には、シャフト20の回転を所定の伝達比で方向変換機構40に伝達する伝達機構44が備えられ、他の搬送ヘッド30の伝達機構44は、その伝達比が、搬送ヘッド30の列の基準となる搬送ヘッド30から離れるに従って漸次大きくなるように設定されている。
(もっと読む)
直交型組付装置
【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
真空吸着パッド
【課題】
凹凸面で凹凸切替わり部に鋭角な落ち込みある場合には、低硬度弾性体のシール材によっても隙間を塞ぎ真空漏れを防ぐことは困難との課題があった。
【解決手段】
真空吸着パッドにおいて、真空室を形成する周縁部の真空シール壁を内シール壁と、内シール壁に外接して外シール壁を設け、二重シール壁の二重構造で形成した。
また、内シール壁と外シール壁の間に液体を連続的に供給する構造を設け、液体シール壁を形成する機能を設けた。
(もっと読む)
真空吸着装置
【課題】真空吸着装置においてワークの設置状況にかかわらず、簡素な構成で前記ワークを確実且つ安定的に吸着することができる。
【解決手段】真空吸着装置10は、負圧流体の供給される供給ポート22を有したボディ12と、該ボディ12の下部に設けられワークWを吸着可能なパッド14と、前記ボディ12とパッド14との間に設けられるシール部材16とを備え、前記パッド14が多孔質体から形成されると共に、前記シール部材16が、前記パッド14に対して剛性が低く形成される。また、パッド14には、該パッド14を平面状に維持する保持プレート26が装着される。そして、例えば、パッド14に対して傾斜したワークWを吸着する際、該パッド14がシール部材16を変形させながら傾斜して前記ワークWに密着する。
(もっと読む)
パネルの搬送装置
【課題】ロボットに保持されたパネルを仮置きすることなく位置検出し直接所定位置に配置するパネルの搬送装置を提供する。
【解決手段】搬送経路に沿って順次送られてくる収容ケース11に、別位置に配置されていたパネル12を載置するパネルの搬送装置10であって、パネル12を吸着保持する吸着パッド13が設けられたロボット14と、吸着パッド13に吸着保持されているパネル12を撮像する第1の撮像手段15と、搬送経路上の停止位置で静止した収容ケース11を撮像する第2の撮像手段16と、第1の撮像手段15によって撮像された画像からパネル基準位置に対するパネル12の位置ずれ量を検出すると共に、第2の撮像手段16によって撮像された画像からケース基準位置に対する収容ケース11の位置ずれ量を検出し、収容ケース11の特定位置にパネル12を載置する吸着パッド13の移動先の座標及び向きを算出する制御手段17とを有している。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
基板搬送アーム及び基板搬送装置
【課題】自重で撓んだ状態の基板を破損させずに基板収容容器から取り出すことができる基板搬送アームを提供する。
【解決手段】基板搬送アーム1は、基板収容容器内に水平に置かれた基板の下側に挿入されて、この基板の裏面を支持しつつ基板を前記収容容器から搬出する。基板搬送アーム1は、基板が搬出されるときに基板の裏面を支持する載置面12sを有する載置部と、当該基板搬送アーム1が基板の下側に挿入されるときに、基板の裏面を少なくとも載置面12sの高さにまで押し上げる押上部12rとを備える。
(もっと読む)
不織布製吸着プレート
【課題】
ワークを固定し、搬送する真空吸着装置などの吸着面に使用し、安価でワークに皺や吸着跡が残らず、また吸着汚れを発生させることのない不織布製吸着プレートを提供する。
【解決手段】
低融点繊維90〜100重量%と、低融点繊維よりも融点が70℃以上高い繊維が10〜0重量%からなる目付50〜200g/m2、嵩密度0.60〜1.20g/cm3の熱接着タイプの不織布Aを吸着面とし、低融点繊維20〜90重量%、低融点繊維よりも融点が70℃以上高い繊維80〜10重量%からなる熱接着された目付300〜800g/m2で嵩密度0.10〜0.50g/cm3の熱接着タイプの不織布Bを真空吸引側として、上記両不織布A,Bを積層し、外周を熱プレスにて融着して吸着プレート1を形成すると共に、非融着部の通気量を50〜150cc/cm2/sec、融着部の通気量をが5cc/cm2/sec以下とした。
(もっと読む)
1 - 20 / 406
[ Back to top ]