
Fターム[3C007FU03]の内容
マニピュレータ、ロボット (46,145) | 吸着装置の目的 (257) | 真空圧の制御 (95)
Fターム[3C007FU03]の下位に属するFターム
真空圧測定器を有するもの (31)
弁の構成/機構 (46)
Fターム[3C007FU03]に分類される特許
1 - 18 / 18
物品搬送装置
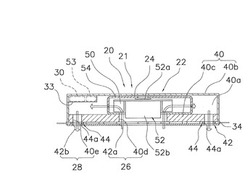
【課題】ファンを用いて物品を搬送する物品搬送装置において、物品に関わる検出器を可及的に減らせるようにする。
【解決手段】移載装置1、非接触でガラス基板を搬送する装置である。移載装置は、ケース22と、ファン24と、吹き出し口28と、電流値測定部と、ファン制御部30と、を備えている。ケース22は、ガラス基板に対向する物品対向部42を有している。ファン24は、ファンケース54の内部に設けられている。吹き出し部は、物品対向部42に設けられ、ファン24との間で空気を流す。電流値測定部は、ファン24の負荷を検出する。ファン制御部30は、電流値測定部の検出結果によりファン24を制御する。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法

【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
真空度切替方法
【課題】真空度付与装置において高い真空度から低い真空度への切替を速やかに行うことを可能とする真空度切替方法を提供する。
【解決手段】ワークWを吸着または離脱させる吸引チャック7に接続されている流路部分8を高い真空度の第1の負圧にある状態から相対的に低い真空度に低圧化するに際し、第2の負圧制御装置4に流路部分8を接続した直後に、オン・オフをわずかな期間オフ状態として、流路部分8に外気を導入し、次に、オン・オフバルブ6をオン状態として、第2の負圧制御装置4から吸引チャック7に至る流路部分の低圧化を果し、しかる後、オン・オフバルブ6をオフ状態としてワークWを離脱させる、真空度切替方法。
(もっと読む)
真空圧制御装置及び真空圧制御方法
【課題】発生させる負圧を安定化することができる真空圧制御装置及び真空圧制御方法を提供する。
【解決手段】気体供給源8から供給される気体流量を制御することにより気体が供給される負圧発生装置に発生させる負圧を安定化する真空圧制御装置及び制御方法であって、負圧発生装置で発生された負圧の圧力を圧力センサ10により検出し、検出された圧力値Pと、予め記憶されている目標負圧P0とが異なる場合に、予め定められた負圧と気体流量との関係式とに基づき、目標気体流量F0を第1の制御装置13で求め、第2の制御装置14が、目標気体流量F0に基づいて流量コントローラ9による流量を目標気体流量F0とし、かつ負圧発生装置2に現に供給されている気体流量を流量センサ11で検出し、第2の制御装置14において、検出された気体流量Fと目標気体流量F0とを比較し、気体流量Fが気体流量F0となるように流量コントローラ9の流量を設定する、真空圧制御装置及び真空圧制御方法。
(もっと読む)
吸着装置
【課題】本発明は、低気圧源に接続し、基板の吸着に用いる吸着装置に関する。
【解決手段】吸着装置は、吸着本体と、気圧制御装置とを含む。吸着本体は、分布範囲を有し基板に接触する平面と、複数の孔とを含む。これらの孔は、平面上に形成され、実質的に平面の分布範囲内に均等に分布する。気圧制御装置は、制御により、低気圧源とこれらの孔とを空圧的に接続する。基板が平面に接触し、かつ気圧制御装置がこれらの孔と低気圧源とを空圧的に接続すると、基板と吸着本体とは相互に固着する。
(もっと読む)
基板吸着装置
【課題】Wet処理装置(洗浄装置あるいは現像装置等液体を用いるプロセス処理機)内の基板搬送にも適用可能で、配管系の不要なコンパクトな基板吸着装置の提供を目的とした。
【解決手段】少なくとも、基板を気密に吸着するためのラッパ状の吸着口を備えるゴムパッド8と、前記ゴムパッドの基部を膜保持ハウジング30を介して気密に被覆するダイアフラム膜7と、前記ダイアフラム膜7を変形させるための圧力制御ブロック3と、を有することを特徴とする基板吸着装置である。
(もっと読む)
吸着装置及びワーク搬送装置
【課題】吸着パッドを所定の真空度にする時間を短縮することができる吸着装置及びワーク搬送装置を提供する。
【解決手段】本発明のワーク搬送装置1は、搬送対象物であるワークwの表面に配置される吸着パッド21を真空ポンプ22により真空引きしてワークwを把持する吸着装置2と、吸着パッド21を支持するクロスバー31とクロスバー31を移動させる駆動アーム32と駆動アーム32を移動可能に支持する支持部材33とを有する構造部材3と、を備えており、前記吸着装置2は、支持部材33に形成された真空タンク4と、真空タンク4と吸着パッド21との間に配置された第一吸気流路5と、第一吸気流路5に配置された電磁弁6と、真空タンク4と真空ポンプ22との間に配置された第二吸気流路7と、を有する。
(もっと読む)
吸着ヘッド、ワーク搬送装置及びワーク搬送方法、並びに、半導体チップ実装装置及び半導体チップ実装方法
【課題】半導体チップを吸着して搬送する搬送系に、気体を給排気する機構の荷重が掛かってしまうことを回避して、高精度、低荷重、低衝撃の搬送を実現すること。
【解決手段】吸着ヘッドは、フリップチップWを吸着する吸着コレット12と、該吸着コレットに連通する吸引流路管25を備えて圧縮空気供給部18に空気供給口21aを近接対峙させて該吸引流路管内を減圧するエジェクタ11とを備えて、前記圧縮空気供給部に非接触状態のまま移動する。
(もっと読む)
異なる高さに置かれたシート状部品の自動取出据付装置
【課題】異なる高さに積層されているシート状部品を、吸着して取り出し、ワークテーブルに搬送してセットする自動装置を提供する。
【解決手段】吸着体ホルダーの先端に吸着体2を設ける。この吸着体と該ホルダーのセンターに配置して、コイルバネを設けた可動ピンを、吸着体ホルダーに貫通させて装着する。さらに、この該ホルダーを保持体5に挿入して設ける。次に、保持体の内部の適当なる位置に、近接センサーを設ける。また保持体の側面よりホースニップルを取付けて、吸着体ホルダーに繋止して設ける。さらにホースニップルに、ソレノイドバルブへ接続された、エアチューブを装着する。最後に、搬送ロボットアーム10に設けられた、ホールド基体11に、保持体を装着する。
(もっと読む)
真空発生システム
【課題】真空発生器を動作させるのに用いた圧縮空気の有効利用を図る。
【解決手段】真空発生システム1において、コンプレッサ11から吐出される圧縮空気により動作する真空発生器13の後段に真空発生器28を設け、真空発生器13と真空発生器28との間にタンク22を設ける。真空発生器13から排出された圧縮空気はタンク22に蓄積される。真空発生器28は、タンク22に蓄積された圧縮空気を用いて動作する。また、経路24により、コンプレッサ11とタンク22とを真空発生器13を介さずに接続する。これにより、コンプレッサ11からタンク22へ圧縮空気を直接的に供給することもでき、真空発生器13が停止している期間でも、真空発生器28を動作させることができる。
(もっと読む)
真空吸着装置及び真空吸着装置を備える成形品取出機
【課題】真空手段の作動及び停止を行なうための圧力設定を成形品毎に行なうことなく、簡単な制御で真空手段によるエネルギー消費量を軽減するとともに、成形品の落下を防止する真空吸着装置を提供する。
【解決手段】吸着部材に真空圧を作用させる真空手段と、真空手段と吸着部材との連通又は連通の遮断を行なう圧力保持弁と、配管を介して吸着部材内の圧力を検出する圧力検出器と、真空手段及び圧力保持弁の作動を制御する制御手段とを備える。制御手段は、圧力保持弁を開き、真空手段を作動させて、吸着部材によりワークを吸着しているときに、圧力検出器で検出した圧力が所定時間一定となった場合には、圧力保持弁を閉じ、真空手段の作動を停止させ、その後、圧力検出器で検出した圧力が一定幅低下した場合には、圧力保持弁を開き、真空手段を作動させる制御を行なう。
(もっと読む)
保持搬送装置
【課題】種々の重量や形状を有する物品を、塑性変形や破損を起こさせることなく、且つ充分な吸引力によって安定して保持して搬送することが可能な保持搬送装置を提供する。
【解決手段】本発明の保持搬送装置1は、複数の吸引孔を有する物品吸着面が設けられた吸引ヘッド2と、吸引ヘッド2の吸引室9に連結された負圧供給手段4とを備えている。この負圧供給手段4は、吸引ヘッド2が物品吸着面に物品を当接させて物品を吸引保持する際に、前記物品吸着面のほぼ全領域に前記物品が配置されて大多数の吸引孔から外気を直接吸引しない状態で前記物品をほとんど塑性変形させることなく吸引保持することができ、且つ、前記物品吸着面に物品が当接していない領域が広く前記物品に当接していない多くの吸引孔から外気を直接吸引する状態でも物品の吸引保持を維持できるような負圧を吸引ヘッド2にもたらすことができるよう広い風量の領域に対して低くフラットな吸込み側静圧特性を有している。
(もっと読む)
非接触型搬送保持具および非接触型搬送保持装置
【課題】非接触型搬送保持具および非接触型搬送保持装置の提供。
【解決手段】内側に一端が閉じ他端が開放された円筒状空間部12を有し円筒部13と底部14を有するボデー11と、ボデー11の円筒部13に形成され円筒状空間部12の側面を構成する円筒状のボデー内周面15と、ボデーの底部14に形成され円筒状空間部12の底面を構成する平坦なボデー底面16と、ボデーの円筒状空間部12の開放側端部に形成された平坦なボデー開放側端面17と、ボデー内周面15のボデー底面側端部に形成され円筒状空間部12にガスを接線成分をもたせて導入する1つ以上のガス導入口18と、を有する非接触型搬送保持具10。円筒状空間部12にガスを供給すると円筒状空間部12内に負圧が生じて、被搬送物を吸引保持する。被搬送物とボデー開放側端面17との間にはガスの流出隙間があるので、被搬送物は非接触保持される。
(もっと読む)
ワーク吸着移送システムにおける給排気制御装置
【課題】個々の吸着パッドに取り付けられる小型軽量の電動エアーポンプによって吸着パッドの真空吸引を行い得るとともに、該電動エアーポンプによって真空破壊用の圧搾エアーを生成し得るワーク吸着移送システムの給排気制御装置を提供する。
【解決手段】電動エアーポンプ1の吸気口2と該吸気口2に接続される吸着パッド23との間に配設した第一電磁弁22を、吸着パッド23内の真空度が所定真空度未満の場合には吸着パッド23内のエアーを吸引する内気吸引状態に切り換え、吸着パッド23内の真空度が所定真空度に達した場合には外気を吸引する外気吸引状態に切り換えられるようにして、電動エアーポンプ1の吸気口2からエアーを吸引し、排気口3から吐出されるエアーをエアー貯留槽28に貯留するようにした。これにより、電動エアーポンプ1によって吸着パッド23の真空吸引を行い得るとともに、該電動エアーポンプ1によって真空破壊用の圧搾エアーが生成できる。
(もっと読む)
真空を用いたノンコンタクト搬送システム
【課題】保持力の大きいノンコンタクト搬送システムを提供すること。
【解決手段】負圧吸引によりワーク9を保持するとともに、ワーク9との非接触を確保するために、ロードセル3または近接センサ2などのセンサ信号をもとに、ワーク9と吸引パッド1間の距離制御を行い、非接触の吊上げ搬送を実現する。
(もっと読む)
吸着検出方法および吸着検出装置
【課題】 吸着具の流路内を流れる流量に基づいて、ワークの吸着および離脱を確実に検出し得る吸着検出方法および吸着検出装置を提供する。
【解決手段】 吸着具内に形成され負圧源に接続される流路内の流量Lが、吸着具にワークが接触していない空吸い状態のもとで吸着レンジの上限値LON以上となった後に、吸着具の流路内を流れる負圧空気の流量が上限値LON以下となったとき(F点)には、ワークが吸着具に吸着されたと判定し、吸着具を移動してワークをある位置から他の位置に移動する。ワークが所定の位置まで搬送されたら吸着具に対する負圧空気の供給を停止(H点)し、停止した状態のもとで吸着具内に流入する空気の流量が下限値LOFF以下となったときにワークが吸着具から離脱したと判定する。
(もっと読む)
真空チャック装置及び吸着圧力制御方法
【課題】 試料を保持するための吸着圧力を小さくすることにより、試料に与えられる損傷を防止することが可能な真空チャック装置及び吸着圧力制御方法を提供する。
【解決手段】 真空チャック装置1を、吸着用パッド11と、吸着用パッド11内の吸着圧力を検出するための真空センサ14と、吸着用パッド11と真空源13とを連通する通路12を流れる気体流量を検出する流量センサ15と、を備えて構成し、検出される吸着圧力が所定の閾値圧力を超え、かつ検出される気体流量が所定の閾値流量を下回るとき吸着用パッド11に印加する吸着圧力を低減する。
(もっと読む)
ガラス搬送装置およびその使用方法
ガラス搬送装置および方法であって、ガラスシートがガラス製造設備内のある地点から別の地点へと移動される際に、ガラスシートの振動を最小限に抑えるようにガラスシートと係合しそれを保持するための強化ロボットが使用される、ガラス搬送装置および方法が本明細書に記載されている。強化ロボットは、1つ以上の吸着カップおよび1つ以上の空気力学式装置を使用することによって、ガラスシートと係合しそれを保持する。吸着カップは、ガラスシートが移動される際に、ガラスシートの外側縁部または非品質領域と接触してそれを支持する。また、空気力学式装置は、ガラスシートが移動される際に、ガラスシートと接触せずに空気力学式装置がガラスシートの品質領域を支持および保持できるように、ガラスシートの中央部分または品質領域に向かってガスを放出する。該装置はまた、空気力学式装置から放出されるガスの温度がガラスシートの温度と実質的に一致するように、空気力学式装置からガラスシートに向かって放出されるガスの温度を調節するための温度制御装置を使用してもよい。 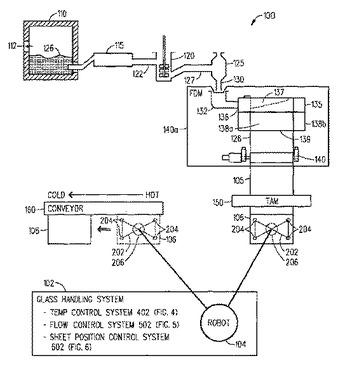 (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]