
Fターム[3C007FU04]の内容
マニピュレータ、ロボット (46,145) | 吸着装置の目的 (257) | 真空圧の制御 (95) | 真空圧測定器を有するもの (31)
Fターム[3C007FU04]に分類される特許
1 - 20 / 31
フィルム吸着装置
【課題】フィルムの剥がれに強く、安定した吸着ができるフィルム吸着装置の提供。
【解決手段】フィルムAを真空吸着する吸着面10aを有する第1の吸着部10と、負圧室25内部を通風する空気流れを形成する空気導入口26及び空気導出口27を有すると共に、フィルムAが剥がれた時にできる隙間を流れる空気のエジェクタ効果による負圧によって、第1の吸着部10による第1の吸着領域とは異なる第2の吸着領域におけるフィルムAを吸引する開口部22を有する第2の吸着部20と、を有するフィルム吸着装置1を採用する。
(もっと読む)
吸着装置及びロボットシステム

【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
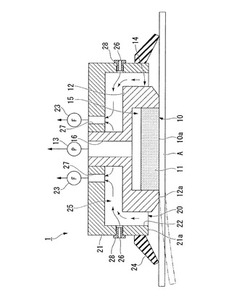
真空源ユニット
【課題】吸着パッドなどの機能部品に対する真空源の構成や配管の取り回しを簡素化することのできる真空源ユニットを提供する。
【解決手段】空気を噴出させる噴気部8が先端部に形成されるとともに後端部に供給ポート11が形成されたノズル体4と、噴気部8の外周側に所定の隙間を空けた状態でノズル体4と一体化され、その噴気部8の外周側から先端側に至る箇所にディフューザ部が形成されたスリーブ体5と、負圧が生じる部分からスリーブ体5の外周面に延びてその外周面に開口するようにスリーブ体5に形成された第一連通孔18と、スリーブ体5を気密状態に挿入する取付孔21が貫通して形成された本体部3と、その本体部3の外表面部に形成された複数の接続用ポート22と、それらの接続用ポート22と取付孔21に挿入されているスリーブ体5における第一連通孔18とを繋ぐ第二連通孔22とを備えている。
(もっと読む)
吸着装置、当該吸着装置を備えた気相成長装置、および吸着方法
【課題】吸着状態の誤判断を防ぐことができる吸着装置、当該吸着装置を備えた気相成長装置、および吸着方法を提供すること。
【解決手段】本発明では、吸着部16を構成する各吸着パッド(図示せず)には、流量センサ66が接続されており、個々の流量センサ66は、各吸着パッドとポンプ82との間の空気の流量を測定する。また、全体用流量センサ62は、吸着部16とポンプ82との間の空気の流量を測定する。制御部54では、個々の流量センサ66および全体用流量センサ62の測定値に応じて、流量センサ66の測定値の閾値を変更する。変更した閾値に基づいて、吸着部16の吸着状態の判定を再度行うことによって、実際には基板トレイ32を吸着しているにも拘らず、基板トレイ32を吸着していないと誤判断されてしまうのを防ぐことができる。
(もっと読む)
ウェハ搬送装置およびウェハ搬送方法
【課題】ウェハのデバイスが形成された面または形成される面に吸着痕や損傷を生じさせることなくウェハを搬送することができるウェハ搬送装置およびウェハ搬送方法を提供すること。
【解決手段】搬送ハンド30の内部には、段差部24に設けられた吸着孔32と、複数の通気用の孔31,33とが設けられている。段差部24は、リブウェハ10のデバイス面2と重ならない位置に設けられている。第1通気用の孔31は、吸着孔32に接続されている。各第1通気用の孔31同士は互いに独立している。各第1通気用の孔31には、異なる第2通気用の孔33が接続されている。各第2通気用の孔33は、それぞれ異なる配管25を介して真空発生源26に連結されている。つまり、複数の吸着孔32に対する真空系統が互いに独立して設けられている。リブウェハ10の吸着状態は、搬送ハンド30の内部に流れる空気の流速に基づいて判定される。
(もっと読む)
熱式流量センサおよび負圧吸着装置
【課題】幅広い範囲の流量領域において、高い精度で判定を行う。
【解決手段】発熱素子および発熱素子の両側に設けられる一対の温度検出素子を有する流量センサの出力を用いて空気の流量を算出する流量算出部131と、流量センサの出力を増幅することで、空気の流量に対する出力電圧の変化の度合いを拡大させる増幅部132と、増幅部132による増幅率を変更する増幅率変更回路と、増幅部132の基準電圧をシフトすることで、空気の流量に対する出力電圧により表される出力特性をシフトさせる出力シフト回路と、増幅率変更回路をオン/オフする第1のスイッチと、出力シフト回路をオン/オフする第2のスイッチと、外部からの信号に応じて第1のスイッチおよび第2のスイッチのオン/オフをそれぞれ制御するスイッチ制御部133と、を備える。
(もっと読む)
真空圧制御装置及び真空圧制御方法
【課題】発生させる負圧を安定化することができる真空圧制御装置及び真空圧制御方法を提供する。
【解決手段】気体供給源8から供給される気体流量を制御することにより気体が供給される負圧発生装置に発生させる負圧を安定化する真空圧制御装置及び制御方法であって、負圧発生装置で発生された負圧の圧力を圧力センサ10により検出し、検出された圧力値Pと、予め記憶されている目標負圧P0とが異なる場合に、予め定められた負圧と気体流量との関係式とに基づき、目標気体流量F0を第1の制御装置13で求め、第2の制御装置14が、目標気体流量F0に基づいて流量コントローラ9による流量を目標気体流量F0とし、かつ負圧発生装置2に現に供給されている気体流量を流量センサ11で検出し、第2の制御装置14において、検出された気体流量Fと目標気体流量F0とを比較し、気体流量Fが気体流量F0となるように流量コントローラ9の流量を設定する、真空圧制御装置及び真空圧制御方法。
(もっと読む)
ロボットハンド及び搬送ロボット
【課題】被搬送物Wがロボットハンド9から落下することを回避して、被搬送物Wの搬送作業の煩雑化を十分に抑えること。
【解決手段】ハンド本体11に設けられかつ真空圧を利用して被搬送物を吸着する複数のベローズ型吸着パッド19と、吸着状態における各ベローズ型吸着パッド19の軸長を測定する軸長センサ29と、各軸長センサ29から測定された各ベローズ型吸着パット19の軸長に基づいて、搬送中における被搬送物Wの姿勢を判定するコントローラ31と、を備えたこと。
(もっと読む)
合紙除去装置
【課題】合紙とガラス基板等の板状体を交互に積層してなる積層体を開梱する場合において、周辺環境による合紙折れ曲がり面の状態変化によっても、合紙の吸着不良を発生させずに、合紙除去可能な合紙除去装置を提供する。
【解決手段】合紙と基板が交互に積載され、前記合紙がガラス基板よりも大きく、少なくとも1辺に前記合紙吸着部を有した積層体から、前記合紙と前記基板を1枚ずつ交互に取り出す開梱装置を構成する、前記積層体から前記合紙を複数の吸着パットで真空吸着して取り出す合紙取出ロボットを有する合紙除去装置において、前記合紙の吸着面に対して基板に向かって縦に、少なくとも2個以上の吸着パットを複数列備える合紙取出ロボットを有する。また、複数の前記吸着パットが、個々の真空配管に電磁弁と圧力計とを有しており、予め定められた吸着圧に達しない前記吸着パットの個々の真空引きを停止する機能を有する。
(もっと読む)
アンパッカー装置
【課題】アンパッカー装置による素ガラス投入において、合紙が外れることを防いで動作異常のないアンパッカー装置を提供する。
【解決手段】素ガラス基板と合紙が交互に積み重ねられたデンスパックから素ガラス基板を取り出すアンパッカー装置であって、素ガラス基板を真空吸着する素ガラス基板吸着手段と、合紙を真空吸着する合紙吸着手段と、ガラス基板吸着手段を駆動する駆動手段Aと、合紙吸着手段を駆動する駆動手段Bと、駆動手段Aと駆動手段Bを制御する制御手段と、を備え、更に、合紙吸着手段には、ミストを噴射するミスト噴射ノズルと、合紙を押し当てる加熱された金属バーと、を備えたことを特徴とするアンパッカー装置。
(もっと読む)
バッチローダーを有する二本アーム・サブストレート取扱いロボット
【課題】ロボットに基づいたサブストレートの大量移送のための改良技術を提供する。
【解決手段】サブストレート取扱いロボット20は第一アーム22と第二アーム26が接続されているアーム駆動機構34を含む。複数サブストレート・バッチローダー24が第一アーム22に接続され、単一面エンド・エフェクタ28が第二アーム26に接続されている。複数サブストレート・バッチローダー24は保持するサブストレート数を示す真空信号を生じる。真空信号インタープリータがサブストレート装荷数に応じて、第一アーム22の運動を代える。第二アーム26に接続されている対象物センサー58は、複数サブストレート・バッチローダー24に隣接するカセットの中のサブストレート数を査定する。サブストレート装荷順コントローラが、カセットの中のサブストレート数に応じて、アームの運動を制御し、複数サブストレート・バッチローダー24の完全装荷を促進する。
(もっと読む)
真空吸着装置及び真空吸着装置を備える成形品取出機
【課題】真空手段の作動及び停止を行なうための圧力設定を成形品毎に行なうことなく、簡単な制御で真空手段によるエネルギー消費量を軽減するとともに、成形品の落下を防止する真空吸着装置を提供する。
【解決手段】吸着部材に真空圧を作用させる真空手段と、真空手段と吸着部材との連通又は連通の遮断を行なう圧力保持弁と、配管を介して吸着部材内の圧力を検出する圧力検出器と、真空手段及び圧力保持弁の作動を制御する制御手段とを備える。制御手段は、圧力保持弁を開き、真空手段を作動させて、吸着部材によりワークを吸着しているときに、圧力検出器で検出した圧力が所定時間一定となった場合には、圧力保持弁を閉じ、真空手段の作動を停止させ、その後、圧力検出器で検出した圧力が一定幅低下した場合には、圧力保持弁を開き、真空手段を作動させる制御を行なう。
(もっと読む)
吸着装置および吸着方法
【課題】吸着パッドに生じた摩耗や位置ずれを自動的に検知する吸着装置を提供する。
【解決手段】吸着パッド10の基準位置L0における吸着力F1を吸着センサ30が測定し、測定された吸着力F1が閾値THより小さいと判定部42が判定した場合には、駆動部20が吸着パッド10を昇降方向または交差方向に所定の変位量を変位させ、変位した位置(変位位置LD)における吸着パッド10の吸着力F2を吸着センサ30が測定するとともに、吸着力F2が閾値THより大きいと判定部42が判定した場合の変位量ΔLを取得する機能を有する制御部40を備える吸着装置100。
(もっと読む)
吸着装置
【課題】小型で騒音の小さい吸着装置を提供する。
【解決手段】モータ200と、モータ200に入力端が連結されたクランク機構300と、シリンダ400と、吸気室505に通じる吸気路504が形成されており、吸気路504の端部に、吸気室505内の負圧が作用すると開放され、正圧が作用すると閉鎖される吸気用チェック弁502を有するシリンダヘッド500と、クランク機構300の出力端に連結されてシリンダ400内を上下動するピストン603によってシリンダヘッド500の吸気室505内の圧力を変化させる構成とされており、ピストン603に形成された排気路613の端部に、吸気室505内の負圧が作用すると閉鎖され、正圧が作用すると開放される排気用チェック弁602を有するダイヤフラムポンプ600と、シリンダヘッド500に設けられたバキュームパット700と、を備えている。
(もっと読む)
真空検知スイッチおよびその真空検知スイッチを用いた吸着支持装置
【課題】爆発性雰囲気の生成が予測される火気使用禁止区域内においても使用可能な真空検知スイッチを提供する。
【解決手段】検知対象空間となる各真空吸着パッド6の真空吸引空間10aに連通する真空検知室18と大気開放する大気圧室19との圧力差に応じて摺動変位するピストン15により、圧縮空気導入ポート26と圧縮空気出力ポート28との間の空気通路を開閉する弁体25を開閉操作する。圧縮空気導入ポート26には空気圧力源8から圧縮空気が供給され、真空吸引空間10aが真空になったときに圧縮空気出力ポート28から検知信号として圧縮空気を出力する。
(もっと読む)
ワーク吸着移送システムにおける給排気制御装置
【課題】個々の吸着パッドに取り付けられる小型軽量の電動エアーポンプによって吸着パッドの真空吸引を行い得るとともに、該電動エアーポンプによって真空破壊用の圧搾エアーを生成し得るワーク吸着移送システムの給排気制御装置を提供する。
【解決手段】電動エアーポンプ1の吸気口2と該吸気口2に接続される吸着パッド23との間に配設した第一電磁弁22を、吸着パッド23内の真空度が所定真空度未満の場合には吸着パッド23内のエアーを吸引する内気吸引状態に切り換え、吸着パッド23内の真空度が所定真空度に達した場合には外気を吸引する外気吸引状態に切り換えられるようにして、電動エアーポンプ1の吸気口2からエアーを吸引し、排気口3から吐出されるエアーをエアー貯留槽28に貯留するようにした。これにより、電動エアーポンプ1によって吸着パッド23の真空吸引を行い得るとともに、該電動エアーポンプ1によって真空破壊用の圧搾エアーが生成できる。
(もっと読む)
吸着ヘッドの駆動方法
【課題】自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【解決手段】負圧により反応容器31を吸着する容器ピックアップ装置21の駆動方法であって、反応容器31に対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に容器ピックアップ装置21を配置した状態で、容器ピックアップ装置21に負圧を加える第1のステップと、該第1のステップにおいて容器ピックアップ装置21により反応容器31を吸着できなかった場合には、容器ピックアップ装置21に負圧を加えた状態で、前記吸引推定領域において容器ピックアップ装置21を移動させる第2のステップと、を有することを特徴とする容器ピックアップ装置21の駆動方法。
(もっと読む)
ワークの取出しヘッド
【課題】 弾性係数の小さいワークでも、ワークに対して僅かな芯振れを生じても確実に吸着保持し、耐久性の向上により高い信頼性が得られ、かつ歩留まりの悪化による生産効率の低下を回避できるワークの取出しヘッドを提供する。
【解決手段】 成形機(生産装置)11の金型装置(生産ヘッド部)12で保持したワーク4を吸着保持して取り出すワークの取出しヘッド1は、ワーク4の押圧時に被押圧部を弾性変形させ被押圧部の弾性復元力により密着して、該ワーク4と取出しヘッド1との間に気密な負圧発生空間13の形成を可能とする取出しヘッド1から突出する箇所20がある押圧部2と、負圧発生空間13に対応する吸気通路3を備え、負圧検出器18で検出した吸気通路3の負圧が負圧設定器17で設定した負圧よりも小さい場合に不良ワーク4が吸着保持されていると判断して警報装置23に作動信号を出力する比較・判断回路22を有する。
(もっと読む)
基板吸着装置及び基板搬送装置並びに外観検査装置
【課題】基板にかかる応力を抑制しつつ確実に吸着保持できるようにする。
【解決手段】外観検査装置1は、基板吸着装置として板金15に固定された3つの吸着部群16A〜16Cを備える。吸着部群16A〜16Cはガラス基板Wの搬送方向に並んで配置されており、各々が3つの吸着部18A〜18Cを備える。吸着部18A〜18Cは、ガラス基板Wの裏面に吸着可能で、首振り動作が可能な吸着パッド22が1つずつ設けられている。最も中央にある吸着部群16Bの吸着部18Bは、上方に押し付け部33が配置されている。押し付け部33は補助パッド35を降下させてガラス基板Wを吸着部18Bに押し付ける。
(もっと読む)
真空吸着パッド
【課題】 真空吸着パッドにおける前記の課題を解決し、コンクリート、モルタル、タイルの凹凸の著しい外壁素材にも高真空で吸着でき、例えば、簡素構造の小型軽量、低コスト、高耐久の、壁面走行安定化装置にも利用可能な真空吸着パッドを提供することを目的とする。
【解決手段】 パッド基板33と、その周囲に沿ってパッド基板に固定したシール部材35と、上記基内に設け、真空源に接続するための真空引き孔37とを備え、これらパッド基板33とシール部材35とで囲まれるパッド内を真空に維持して被吸着面に吸着させる真空吸着パッドP1において、上記シール部材35は、高分子ゲルで形成されるとともに、被吸着面側先端35aに向かって先細りとし、断面形状において、上記先端35aの角度が鋭角であり、かつ、この先端を、パッド基板に固定したシール部材固定部の幅方向中心よりも外側に位置させた。
(もっと読む)
1 - 20 / 31
[ Back to top ]