
Fターム[3C007GS00]の内容
マニピュレータ、ロボット (46,145) | 把持装置交換 (231)
Fターム[3C007GS00]の下位に属するFターム
接合手段 (126)
給電、流体供給のためのジョイント (34)
位置決めピンを別途有するもの (8)
交換終了検知手段を有するもの (5)
ハンド貯蔵 (31)
ハンド交換のための制御 (20)
Fターム[3C007GS00]に分類される特許
1 - 7 / 7
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
チャック装置およびロボットアーム

【課題】ワークの搬送効率をより向上することができるチャック装置を提供すること。
【解決手段】チャック装置1は、チャック部10〜50を備える。チャック部10は、3つのチャック11を支持する支持板12が連結部材13によりギア14と連結されてなる。支持板12は、側板62にY方向に沿って上下に移動自在に支持されている。駆動側のギア82の回転によりギア87が回転すると、クランク機構である連結部材13により回転運動が直線運動に変換され、支持板12が上下に往復運動し、チャック11も上下に往復移動する。チャック部20〜50も同様である。チャック装置1は、隣り合うチャック部同士の往復方向における位置にずれが生じるように構成されている。例えば、チャック部20が前進すれば隣のチャック部10が後退する動作を行う。これにより隣り合うチャック部の間隔を広げなくてもチャックの数を増加してワークの搬送効率を向上できる。
(もっと読む)
ロボットのシャフトに対するフランジ取付構造
【課題】製造コストが安く、常に正常な位置決め状態に取り付ける。
【解決手段】一方の抱持腕部9bには、締め付け部9の中空中心部Pへ指向し且つ途中部が取付ねじ挿通用孔部11と交差する位置決めねじ螺合用雌ねじ部13を有する。位置決めねじ13を位置決めねじ螺合用雌ねじ部14にねじ込んで該位置決めねじ13先端を直動軸5の平坦面5aに押圧することで位置決めをし、取付ねじ10で、フランジ6を直動軸5に取り付ける。位置決めねじ13の長さを、該位置決めねじ13の先端が平坦面5aを押圧したときに該位置決めねじ13の基端が取付ねじ挿通用孔部11内に突出せず、且つ先端が平坦面5a以外の外面を押圧したときに基端が取付ねじ挿通孔部11内に突出する長さに設定している。
(もっと読む)
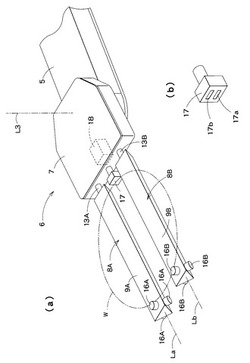
基板搬送装置およびそれを備えた基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
ロボット加工機および加工システム
【課題】一のロボット加工機で穴加工と搬送の両方を行えるようにする。
【解決手段】複数の関節からなるロボットアーム12を備え、穴加工を行うロボット加工機10であって、ワークの搬送を行うハンドユニット16と、主軸18aによって穴加工を行う加工ユニット18と、ハンドユニット16と加工ユニット18とを交換して保持するユニット交換機構14と、ユニット交換機構14によってハンドユニット16から加工ユニット18に交換し、穴加工を行うように制御する制御装置Cとを有する。ロボットアーム12は可搬重量が制限されているが、ユニット交換機構14によってユニットを交換できるので、非同時であるものの穴加工と搬送の両方を行える。
(もっと読む)
機能可変型ロボットシステムおよび機能可変型ロボット制御方法ならびに機能可変型ロボット制御プログラム
【課題】無駄な機能を購入することなくネットワークを用いた簡単なシステムで多様な作業を行うことができる機能可変型ロボットシステムを提供する。
【解決手段】車輪を駆動して移動する自律移動型ロボット10と、当該自律移動型ロボット10に着脱自在に取り付けられ、所定の機能を実行する複数の機能モジュール20と、自律移動型ロボット10の移動を制御するパーソナルコンピュータと、複数の機能モジュール20の制御プログラムを格納しているデータベースと、複数の機能モジュール20の各々に付加され、当該機能モジュール20固有の情報を格納している記憶手段24と、自律移動型ロボット10に搭載され、記憶手段24に記憶されている当該固有情報を読み取り、当該機能モジュールを識別する識別手段14と、を備える。
(もっと読む)
電子部品保持装置,電子部品装着システムおよび電子部品装着方法
【課題】吸着ノズルを保持するノズルヘッドのヘッド保持部材に対する着脱が容易な電子部品保持装置,電子部品装着システム,電子部品装着方法を提供する。
【解決手段】ヘッド保持部材52の吸着面130をリボルバヘッド56の被吸着面200に密着させてヘッド吸着用負圧室204を形成し、リボルバヘッド56を負圧により吸着し、回転,昇降させる。リボルバヘッド56は12個ずつの吸着ノズル212,バルブ装置264を備え、ヘッド保持部材52の昇降に連動してレバー駆動部材510を回動レバー224,第一,第二バルブスプール280,310に係合させて吸着ノズル212を機械的に昇降させ、バルブ装置264を負圧供給状態と正圧供給状態とに機械的に切り換えさせ、吸着ノズル212に電子部品を吸着,装着させる。
(もっと読む)
1 - 7 / 7
[ Back to top ]