
Fターム[3C007HS00]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598)
Fターム[3C007HS00]の下位に属するFターム
直動型 (63)
揺動型 (4)
回転型 (7)
メカノサーマルアクチュエータ(形状記憶合金) (18)
メカノケミカルアクチュエータ (16)
人力 (21)
電池 (69)
静電式 (10)
流体式 (364)
電気式 (1,016)
Fターム[3C007HS00]に分類される特許
1 - 10 / 10
マイクロピンセット、その製造方法及びその操作方法
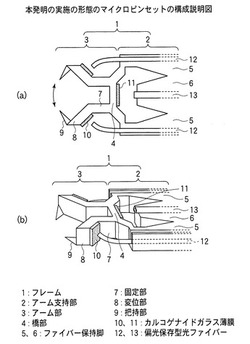
【課題】マイクロピンセット、その製造方法及びその操作方法に関し、操作性及び簡易性を向上する。
【解決手段】アーム支持部2と前記アーム支持部に設けられ先端部を把持部9とする一対のアーム部3とからなるフレーム1と、前記一対のアームに設けられたAs−S、As−Se或いはAs−S−Seのいずれかのカルコゲナイドガラス薄膜10,11からなる駆動素子と、前記カルコゲナイドガラス薄膜に偏光保持型光ファイバ12,13を経由してレーザ光を照射するレーザ光照射手段とを備える。
(もっと読む)
把持機構

【課題】 多種・多様な把持対象物に対して柔軟になじみ、また把持対象物の把持・操り・運搬などの動作により生じる力やモーメントにも耐えうる把持機構を提供することを目的とする。
【解決手段】 把持機構は、内外連続式袋状構造体1、状態変化部2、状態変化発生部3を有する。内外連続式袋状構造体1は、袋が外側から内側へと連続した構造となっている。状態変化部2は、内外連続式袋状構造体1に内包されている。状態変化発生部3は、上記状態変化部2の状態を変化させるものである。
(もっと読む)
産業用ロボット
【課題】簡易な構成で、搬送対象物の把持、解放を行うことができる産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物2を搭載するハンド3と、ハンド3を保持する多関節アーム部とを備えている。ハンド3は、搬送対象物2を把持するための把持部28と、搬送対象物2から退避させる方向へ把持部28を付勢する付勢部材29とを備えている。把持部28は、搬送対象物2に当接する把持部材34と、多関節アーム部の伸縮動作に伴う慣性力で、把持部材34が搬送対象物2に当接する方向へ把持部材34を移動させる重量部材35とを備えている。
(もっと読む)
ダブルアーム列式基板搬送用ロボット
【課題】 モータの必要台数を減らし、構造を簡単化、小型化、軽量化して、製作コストを低減することを可能にしたダブルアーム列式基板搬送用ロボットを提供する。
【解決手段】 アーム伸縮機構A、Bが左右に2列備えられ、最終段アームとなる第2アーム107、107’の先端にはハンド110、110’が結節されて設けられ、第1アーム105、105’を位相差を持って正逆回転させることにより、ハンド110、110’が位相差を持って直線運動するように構成されて成るダブルアーム列式基板搬送用ロボット101が、アーム駆動手段160をさらに備えている。アーム駆動手段160は、第1アーム105、105’に備えられる第1の永久磁石167、167’に対応させて、第2の永久磁石162、162’を有し、これが正逆回転することにより、これらの永久磁石の磁気結合を介して第1アーム105、105’が位相差を持って正逆回転する。
(もっと読む)
ワーク把持装置
【課題】主にワークを把持する把持力を微調整することができ、ワークの破損や品質低下などを防止することができるワーク把持装置を提供する。
【解決手段】可動爪26にはピストン54が接触していると、ワークWを把持する際にピストン54が抵抗となり、作動スプリング44の弾性力により可動爪26が瞬時に固定爪18側に移動してしまうことを防止できる。これにより、固定爪18と可動爪26とによりワークWを把持するときに、ワークWに作用する衝撃力を緩和することができる。この結果、ワークWの破損を防止できるとともに、ワークWを把持する把持力の微調整を可能にすることができる。
(もっと読む)
液体供給ステーションを備えた移動ロボットシステム及び移動ロボットの液体供給方法
【課題】 移動ロボットの使い勝手の良さ及び使用時間の延長のため、移動ロボットに使われる水やメタノールのような液体を自動的に供給する液体供給ステーションを備えた移動ロボットシステム及び移動ロボットの液体供給方法を提供する。
【解決手段】 本発明に係る液体供給ステーションを備えた移動ロボットシステム1は、自ら走行する移動ロボット30と、移動ロボット30に設けられ、移動ロボット30が使う液体を保存する液体タンク37と、移動ロボット30の供給信号に応じて、液体タンク37に液体を供給する液体供給ステーション10とを含む。
(もっと読む)
ロボットハンドの指ユニット
【課題】
従来のロボット用多指ハンドは、金属やプラスチック等のリジッドな機構をモータおよびベルトなどで駆動する方式である。柔軟物や壊れやすい物を把持する場合、把持する物を壊したり潰さないようにするためには、トルクセンサや触覚センサ等を用いた柔軟制御を行う必要がある。
【解決手段】
伸縮性を有する外皮11と、外皮11内に設置され、1つ以上の可動ジョイント部13を有する骨格12と、外皮11と骨格12の間に配置され、伸縮により骨格12を可動方向に動かすことができるように配置された2つ以上のエレクトロアクティブポリマー14と、エレクトロアクティブポリマー14の両端部に接続されたリード線15とを備える。
(もっと読む)
真空吸着具
【課題】 装置全体の小型化を図ることができ、精密部品搬送用に適した真空吸着具を提供する。
【解決手段】 真空吸着具10は、先端面12aに開口する貫通孔13が設けられた中空の取付部材12と、先端面12aに対向して配置される後端面28と被搬送物Wに接触する吸着面26とに開口する吸引孔27が設けられた吸着パッド23と、後端部15が取付部材12に固定され先端部が吸着パッド23に固定され、貫通孔13及び吸引孔27とに連通する連通室17を区画形成する弾性筒体14とを有している。取付部材12の先端面12aと吸着パッド23の後端面28のそれぞれには永久磁石32,34が固定されており、永久磁石34には、弾性筒体14の膨張収縮時に、貫通孔13内を摺動して取付部材12に対する吸着パッド23の移動方向を制限する位置決め部材37が固定されている。
(もっと読む)
ロボットハンド等の関節機構
【課題】 関節軸の左右方向の寸法を増加させることなく、関節軸の駆動トルクを高めることのできるロボットハンド等に用いる関節機構を提案すること。
【解決手段】 関節機構100は、ロボットハンドの多関節指ユニットの関節機構として用いることができ、垂直関節軸101の後側には、2台のアクチュエータ110、120が上下方向に並列配置され、それらの出力軸113および123の先端には第1、第2の駆動側ベベルギア114、124が同軸状態に連結固定されている。垂直関節軸101には同軸状態で第1、第2の従動側ベベルギア141、142が固着され、これらが第1、2の駆動側ベベルギア114、124に噛み合っている。2台のアクチュエータ110、120によって垂直関節軸101が回転駆動され、そこに連結されている旋回ブラケット130が左右に旋回する。
(もっと読む)
ロボットハンド等の関節機構
【課題】 外径寸法を増加させることなく、関節軸の駆動トルクを高めることのできるロボットハンド等に用いる間接機構を提案すること。
【解決手段】 関節機構100は、ロボットハンドの多関節指ユニットの関節機構として用いることができ、垂直関節軸101を挟み、前後から第1、第2のアクチュエータ110、130が対向配置され、それらの出力軸113および133の先端には第1、第2の駆動側ベベルギア114、134が同軸状態に連結固定されている。垂直関節軸101に同軸状態で固着された従動側ベベルギア140は、第1、2の駆動側ベベルギア114、134に噛み合っている。2台のアクチュエータ110、130によって垂直関節軸101が回転駆動され、そこに連結されている旋回ブラケット120が左右に旋回する。
(もっと読む)
1 - 10 / 10
[ Back to top ]