
Fターム[3C007HS10]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 静電式 (10)
Fターム[3C007HS10]に分類される特許
1 - 10 / 10
微小マニピュレータ装置
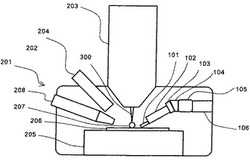
【課題】FIB装置に組み込んだ微小マニピュレータ部をその場でエッチング加工することで、従来困難であった1μm以下の微小物のハンドリングの確実性を高めるとともに、マニピュレータの再利用により作業効率やメンテナンス性を向上する。
【解決手段】微小マニピュレータ部を位置および向きを変えることのできる移動機構で保持することにより、マニピュレーション作業前にマニピュレータ先端部をFIB加工するとともに、作業中のマニピュレータ先端の汚染や破損があった場合でも、加工により再度使用可能な形状に再生する。
(もっと読む)
微小マニピュレータ、及びそれを備えた観察装置

【課題】微小マニピュレータ自体の振動を軽減することで、微小な試料を確実に操作できる微小マニピュレータ、及びそれを備えた観察装置を提供する。
【解決手段】試料300(400)を把持するための対向する一対のアーム71と、アームを支持するベース部11と、ベース部に取り付けられてアームを開閉させる開閉アクチュエータ35とを有するマニピュレータ部100aと、マニピュレータ部の変位を検出する変位検出部110a1、110a2と、ベース部と外部装置200との間に取り付けられ、マニピュレータ部を試料に対して3次元移動させる移動機構120と、変位検出部によって検出された変位を打ち消すように、移動機構を制御する制御部130とを備えた微小マニピュレータである。
(もっと読む)
パラレルリンク型作業装置
【課題】パラレルリンク型作業装置において、可動部に動力を伝達する動力伝達部のリンク等がベースの領域からはみ出ないようにする。
【解決手段】ベース4に扁平な回転型アクチュエータ6を3つ設ける。アクチュエータ6は、その回転出力軸がベース4に対して平行で、ベース4の中央に向き、かつベース4の中央から放射状に並ぶように配置、固定されている。各回転型アクチュエータ6の回転出力軸と可動部5とを平行リンク機構21で構成される動力伝達部で連結する。3つの回転型アクチュエータ6を駆動して可動部5の位置を制御する。ベース4に設けられたエンドエフェクタ姿勢制御用のアクチュエータ7で回転動力伝達手段15を介して可動部5に設けたエンドエフェクタ20を回転させる。平行リンク機構21はベース4の内側領域で移動することから、リンク等がベースの領域からはみ出ることはなく、安全が確保できる。
(もっと読む)
ピンセット付き走査型プローブ顕微鏡および搬送方法
【課題】 ピンセットの基板への接触、試料の把持検出、試料の形状測定ができるピンセット付き走査型プローブ顕微鏡の提供。
【解決手段】ピンセット付き走査型プローブ顕微鏡は、探針部が形成された第1のアームと、第1のアームに対して開閉自在に設けられた第2のアームと、開閉駆動電圧が印加され、第2のアームを開閉駆動する静電アクチュエータと、静電アクチュエータ6が有する電気的等価回路を帰還回路として用いることにより自励発振させ、その自励発振により第2のアームを振動させる増幅器91と利得調整手段95を有し、第2のアームの物体への接触による振動状態の変化を検出する振動状態検出部93とを備える。
(もっと読む)
AFMピンセット、AFMピンセットの製造方法および走査型プローブ顕微鏡
【課題】走査型プローブ顕微鏡において、高精度な観察と、安定した把持とを両立させることができるAFMピンセットの提供。
【解決手段】AFMピンセットは、三角柱部材の稜線の先端を走査型プローブ顕微鏡の探針として使用可能な第1のプローブ10Bと、第1のプローブ10Bに対して開閉自在に設けられた三角柱部材から成る第2のプローブ20Bとを備え、各三角柱部材の所定の周面がほぼ平行状態で対向するようにプローブ10B,20Bを並置した。そして、稜線の先端で試料を走査する際の試料との干渉を防止する切り欠き部100を、第1のプローブ10Bに形成した。
(もっと読む)
ナノピンセットおよびその製造方法
【課題】汚れにくいナノピンセットの提供。
【解決手段】ナノピンセット1は、開閉自在な一対のアーム3と、アーム3の各々に形成された試料把持部3aと、各アーム3の少なくとも試料把持部3aを含む領域に形成された撥水性膜とを備えることを特徴とする。撥水性膜には、例えば、導電性を有する撥水性膜や化学吸着単分子膜が用いられる。
(もっと読む)
微小試料把持方法、微小試料把持装置のコントローラおよび微小試料把持システム
【課題】 微小試料の把持および解放を正確に行うことができるナノピンセット装置の提供。
【解決手段】 ナノピンセット1の静電アクチュエータ4a,4bを構成する固定電極5a,5bおよび可動電極6a,6bは、いずれも櫛歯形状を呈しており、相互に複数の櫛歯が噛み合うように対向配置されている。固定電極5a,5bは台座10に固定され、アーム3a,3bおよび可動電極6a,6bは、支持部7a,7bおよびアーム支持部9a,9bにより弾性的に支持されている。記憶部40bには、各アーム3a,3bの弾性特性に応じた電圧出力パターンが記憶されている。この電圧出力パターンに基づいて静電アクチュエータ4a,4bに駆動電圧を印加することにより、アーム3a,3bは左右対称に駆動される。
(もっと読む)
ナノピンセット装置および微小試料の把持方法
【課題】 微小物体を正確に把持したり解放したりすることができるナノピンセット装置を提供すること。
【解決手段】 ナノピンセット1の静電アクチュエータ4a,4bを構成する固定電極5a,5bおよび可動電極6a,6bは、いずれも櫛歯形状を呈しており、相互に複数の櫛歯が噛み合うように対向配置されている。固定電極5a,5bは台座10に固定され、可動電極6a,6bは細いビーム状の支持部7によって台座10に弾性的に固定されている。電源回路2により固定電極5a,5bと可動電極6a,6bとの間に直流電圧を印加すると、クーロン力により可動電極6a,6bが移動してアーム3を駆動する。ナノピンセット装置50では、静電アクチュエータ4a,4bをロック状態とすることにより、微小物体を確実に把持することができる。
(もっと読む)
関節駆動機構およびロボットハンド
【課題】関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【解決手段】 ロボットハンド指機構の関節部を駆動する駆動素子13に、直動式アクチュエータを用いて、把持力を発生する方のアクチュエータ13bの出力は大きく設定し、把持力に関係しない方のアクチュエータ13aは出力を小さく設定することで、ロボットハンドの軽量、小型化を実現する。
(もっと読む)
ナノグリッパ装置
【課題】 試料が把持されたか否かを確実にかつ容易に確認することができ、試料を適切な状態で把持することができるナノグリッパ装置の提供。
【解決手段】 駆動部6には各アーム3を駆動するめの固定電極および可動電極が設けられている。固定電極60aおよび可動電極61aは左側のアーム3を駆動するものであり、可動電極61aは支持部62により台座7に弾性支持されている。同様にアーム3も支持部63により台座7に弾性支持されている。電極60a,61a間に電圧を印加すると、クーロン力により可動電極61aが右側に移動しアーム3を閉駆動する。検出回路91A,91Bにより検出される電極60a,61a間の静電容量および電極60b,61b間の静電容量の変化に基づいて、試料が把持されたか否かを判断する。
(もっと読む)
1 - 10 / 10
[ Back to top ]