
Fターム[3C007HS12]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 流体式 (364) | シリンダ (292)
Fターム[3C007HS12]の下位に属するFターム
Fターム[3C007HS12]に分類される特許
1 - 20 / 119
真空吸着装置
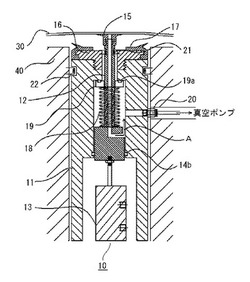
【課題】大型で歪みの大きい加工材料を容易に吸着することができ、且つ加工応力に耐えうる保持力も確保することができる真空吸着装置を提供する。
【解決手段】被加工物30に対して進退可能に設けられ、減圧または粘着によって上記被加工物の表面を係着させる第1の係着部材15と、この第1の係着部材の周りを囲む如く形成され、上記被加工物における上記第1の係着部材による係着部の外側周囲部分を減圧によって係着させる第2の係着部材17とを備えたことを特徴とする。
(もっと読む)
パワーアシスト装置

【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
デパレタイズロボットのロボットハンド
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
搬送装置
【課題】搬送装置の重量を軽減する。
【解決手段】本搬送装置1の前記カムリング20は、それぞれ複数のカム溝形成部分22と前記カム溝形成部分同士を連結する連結部分23とからなり、前記カム溝21はカムリング20の半径方向に対して傾斜して設けられ、前記カム溝形成部分22は前記カム溝21に合わせて半径方向に傾斜した形状であり、前記連結部分23は前記傾斜部よりも幅狭に形成されている。また、前記カムリング20をスタンド10に回転自在に保持する複数のカムリング保持部を、前記カムリングの前記連結部分23と前記支持体とのそれぞれの対向面に有する。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
食品の搬送装置
【課題】挟持部材を開操作したときの開度を、送出位置で食品を挟持するときの開度に対して払出位置で食品を払い出すときの開度が小さくなるように設定することができる食品の搬送装置を提供すること。
【解決手段】製造工程から複数個ずつ並んで送出位置Aに送出された食品Wを、挟持部材2によって一旦挟持して持ち上げ、次工程の払出位置Bに整列した状態で払い出す食品の搬送装置1において、挟持部材2を開閉操作する挟持部材操作手段3と、挟持部材操作手段3によって挟持部材2を開操作したときの挟持部材2の開度を、送出位置Aで食品Wを挟持するときの開度に対して払出位置Bで食品Wを払い出すときの開度が小さくなるように設定する挟持部材開度設定手段4とを備えるようにする。
(もっと読む)
太陽電池セルの移送装置およびその移送方法
【課題】積層された多数枚の太陽電池セルのうちの最上層の太陽電池セルのみを破損することなく確実に取り出すとともに、寸法精度を確保して移送する。
【解決手段】水平な下面を有するフラットテーブル4を備え、最上層の太陽電池セルを吸着する位置と上方に退避した位置との間を昇降自在で、太陽電池セルの退避位置と移送位置との間を移送自在なベース3と、フラットテーブル4の幅方向中央を貫通してベース3に対して昇降自在な吸着パッド7と、フラットテーブル4の四隅をそれぞれ貫通するとともに、下端面がフラットテーブル4の下面よりも下方に突出して設けられた規正パッド8とから構成される。そして、吸着パッド7を介して太陽電池セルの幅方向中央部を吸着してフラットテーブル4の下面に接触するように持ち上げるとともに、規正パッド8を介して太陽電池セルの四隅を吸着してフラットテーブル4の下面に沿わせる
(もっと読む)
回転体の把持装置
【課題】簡単な構成で、タイヤなどの回転体の中心位置を位置決めできる回転体の把持装置を提供する。
【解決手段】タイヤ把持装置10を、把持アーム11〜13と、基台21と、基台21に立設された中心ピン部材22と、中心ピン部材22に回転可能に取付けられた板状部材23と、固定側ピン部材P1k(k=1〜3)、可動側ピン部材P2k、固定側アームA1k、可動側アームA2k、及び、中間ピン部材P3kとを備えた連結機構24とから構成するとともに、中心ピン部材22の下端と固定側ピン部材P1kを結ぶリンクを固定リンクとし、中心ピン部材22の上端と可動側ピン部材P2kを結ぶリンクと可動側アームA2kと固定側アームA1kとをそれぞれ第1〜第3の可動リンクとした3つのリンク機構により、固定側アームA1kの先端に取付けた把持アーム11〜13を拡幅して、タイヤTの内縁部を把持するようにした。
(もっと読む)
把持装置と方法
【課題】一度に、複数の対象物を把持して搬送できるようにすることにある。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7と、を備える。1対の把持爪3a、3bは、支持移動体7に対して往復動方向に駆動されることで、互いに近接して対象物1を挟み、または、互いに離間して該対象物を解放するようになっている。さらに、1対の把持爪3a、3bの間に位置し、1対の把持爪が把持した対象物1を保持する保持機構8を備える。1対の把持爪3a、3bに把持された対象物1が、当該把持から解放されるように保持機構8内の奥側に移動させられて、当該奥側で保持機構8に保持され、この状態で、1対の把持爪3a、3bが、別の対象物1を把持できるように構成されている。
(もっと読む)
把持装置と方法
【課題】互いの隙間を狭くして複数の対象物を配列した場合であっても、より容易に、対象物を挟んで把持できるようにする。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7とを備える。1対の把持爪は、支持移動体に対して往復動方向に駆動されることで、互いに近接して対象物を挟み、または、互いに離間して該対象物を解放するようになっている。往復動方向は、1対の把持爪3a、3bが対象物1を挟む方向に対して斜めの方向である。
(もっと読む)
開閉チャック
【課題】ワークの把持を正確に検出することが可能な開閉チャックを提供する。
【解決手段】爪によりワークを把持する開閉チャックであって、ガイドレールを有するガイド部材と、ガイドレール上を摺動するよう設置され、爪を取り付け可能な第1及び第2のスライダと、第1及び第2のスライダが互いに離間又は接近するよう、第1及び第2のスライダを摺動させる駆動源と、ガイド部材において、第1及び第2のスライダに取り付けられた爪がワークを把持した際にひずみが生じる位置に取り付けられたひずみセンサと、を備える開閉チャック。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化/薄型化を図る。
【解決手段】上方基板15と下方基板25との間に、2本のリニアアクチュエータU1,U2を、互いに逆方向に傾斜するように配置する。アクチュエータU1,U2の上端は、上方膜部11,12を介して上方基板15に接続され、下端は、導電性の下方膜部21,22を介して下方基板25に接続される。上方基板15に右方向の力が作用して右方へスライドすると、U1は寝る方向へ傾いて下方膜部21は上方へ変形し、U2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5による容量素子と、下方膜部22と電極E6による容量素子との容量値の差により、X軸方向の力検出を行う。両容量値の和により、Z軸方向の力検出もできる。アクチュエータU1,U2を伸縮駆動すれば、上方基板15を移動させたり回転させたりできる。
(もっと読む)
把持装置
【課題】対象物の内周面を利用して対象物を把持する場合に、複数の把持部で対象物を把持する前にいずれかの把持部が内周面に当たって、その結果、対象物の位置または姿勢が変化してしまうことを防止する。
【解決手段】対象物1の内周面1aを利用して対象物1を把持する把持装置10。対象物1を把持する複数の把持部3a、3b、3cと、これら把持部の動作を制御する制御装置11と、を備える。複数の把持部は、内周面1aの中に挿入された状態で、互いに離間する方向に離間駆動され、これにより、内周面1aに押し付けられることで対象物1を把持する。さらに、把持部に設けられた位置情報取得センサ11aを設ける。離間駆動の時に、位置情報取得センサ11aは、把持部と内周面1aとの位置関係を検出し、制御装置11は、該位置関係に基づいて把持部の位置を調整する。
(もっと読む)
圧縮ばねハンドリング装置
【課題】
サイズが異なる複数の圧縮ばねを取り扱う事が可能な圧縮ばねハンドリング装置を提供すること。
【解決手段】
本発明に係る圧縮ばねハンドリング装置は、圧縮ばねを圧縮方向に挟持する開閉自在な対となった挟持爪を有する挟持爪ユニットと、前記挟持爪それぞれに対応して設けられ、前記挟持爪と一緒に移動すると共に圧縮ばねを挟持した状態において挟持爪と当接している圧縮ばねの端部を押し、挟持された圧縮ばねを前記挟持爪ユニットから押し出すプッシャーと、各前記プッシャーを押出方向に同期駆動する押出駆動部と、から構成されている。
(もっと読む)
ロボットハンド
【課題】ワークチャック装置のチャック位置にワークを自動で精度良くセットできるロボットハンドを提供すること。
【解決手段】ロボットアームに装着されるものであって、3個以上のハンド爪14によりワーク10の内周又は外周を把持し、ワークチャック装置のチャック位置にワーク10を挿入させるロボットハンドにおいて、3個以上のハンド爪14に把持されたワーク10が軸心を中心とする回転方向に外力を受けた場合に、ワーク10を自由に回転させる自由回転機構を有する。
(もっと読む)
流体圧伝達装置及びロボットハンド装置
【課題】小型化及び軽量化を図ることができる流体圧伝達装置、及びこれを備えたロボットハンド装置を提供する。
【解決手段】流体圧伝達装置は、複数の主駆動流体圧シリンダ371,372と、主駆動流体圧シリンダ371,372のシリンダ室3711,3712と流体圧伝達路381,382を介してシリンダ室23a,24aが連通される複数の従動流体圧シリンダ23,24と、ピストン412で2つのシリンダ室41a,41bに区切られた副駆動流体圧シリンダ41とを備え、主駆動流体圧シリンダ371,372が発生した流体圧を従動流体圧シリンダ23,24に伝達する。ピストン3711,3712は主モータ40により、ピストン412は副モータ43により、夫々駆動される。流体圧伝達管381,382と副駆動流体圧シリンダの各シリンダ室41a,41bとは連通管421,422に介して連通する。
(もっと読む)
1 - 20 / 119
[ Back to top ]