
Fターム[3C007HS23]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016)
Fターム[3C007HS23]の下位に属するFターム
Fターム[3C007HS23]に分類される特許
1 - 6 / 6
補助トルク発生装置および補助トルク制御方法
【課題】歩行ロボットの関節に発生させる補助トルクの最大値を歩行中の任意の時点で変化させること。
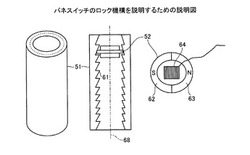
【解決手段】バネスイッチのシリンダ51内をスライドするスライド部52にバネの一端を連結し、シリンダ51内表面に窪み61を設けるとともにシリンダ51の中心軸68に垂直な断面でのスライド部52の断面積を変えることによって、バネをバネスイッチでロックする。スライド部52は、S極部62と、N極部63と、コイル64とを有し、コイル64が発生する磁界によりS極部62とN極部63をくっ付けたり離したりすることによってシリンダ51の中心軸68に垂直な断面でのスライド部52の断面積を変える。
(もっと読む)
ナノピンセットおよび把持方法

【課題】アームが物体に接触したことを感度良く検出することができるナノピンセットの提供。
【解決手段】ナノピンセットは、開閉自在な一対のアームと、開閉駆動電圧が印加され、一対のアームの少なくとも一方を開閉駆動する静電アクチュエータ6と、静電アクチュエータ6が有する電気的等価回路を帰還回路として用いることにより自励発振させ、その自励発振によりアームを振動させる増幅器91と、アームの物体への接触による振動の変化を検出する振動変化検出部93とを備えたことを特徴とする。
(もっと読む)
アクチュエータおよびアクチュエータを用いた人工筋肉
【課題】簡単な構造により安定した大きな駆動力を供給可能な、電磁石を用いたアクチュエータを提供すること。
【解決手段】軸部材と、該軸部材に対して摺動する少なくとも2つの独立した摺動部材と、前記摺動部材上において、前記摺動方向について直列に配置された複数の電磁石と、前記電磁石に電流を供給する電流供給部と、を備えたアクチュエータにおいて、アクチュエータの全体長が収縮する方向、および伸張する方向の少なくとも一方について、前記摺動部材を摺動させる方向に斥力あるいは引力を発生させるように、前記複数の電磁石の極性を定めた。
(もっと読む)
試料操作装置
【課題】基板上に載置された試料を確実且つ速やかに把持できると共に、把持が完了したか否かを高精度に検出すること。試料に応じて把持力を調整すると共に試料の脱離が完了したか否かを高精度に検出すること、
【解決手段】基板表面2a上に載置された試料Sをマニピュレーションする装置であって、試料Sを観察して少なくとも位置データ及び形状データを取得した後、両データに基づいて観察用プローブ15と把持用プローブ16との間に試料Sが位置するように移動手段5によりピンセット4を位置決めさせ、該位置決め後、変位測定手段7による測定結果をモニタしながら移動手段5によりピンセット4を基板表面2aから一定距離離間した位置に高さ設定し、その後、設定した高さで変位測定手段7による測定結果をモニタしながら把持用プローブ16を観察用プローブ15側に移動させて、把持開始点を検出しながら試料Sを把持させる試料操作装置1を提供する。
(もっと読む)
電磁式アクチュエータ及び電磁式アクチュエータ装置
【課題】微細に駆動することができ、駆動以外の方向に柔軟性がある電磁式アクチュエータ及び電磁式アクチュエータ装置を提供する。
【解決手段】磁力を発生し、発生する磁力の方向を変更できる空芯コイル21、及び、磁性を有する芯部材22により構成される電磁石20と、電磁石20と交互に配置され、磁力を有する複数の永久磁石30と、電磁石20及び永久磁石30を駆動範囲に移動可能に保持し、弾性及び絶縁性を有した保持手段40と、電磁石20に電流を流す電源制御部50とを備える。
(もっと読む)
挟持具および挟持装置ならびに挟持方法
【課題】物体を破壊することなく確実に挟持することが可能な挟持具およびこれを用いた挟持装置ならびに挟持方法を提供する。
【解決手段】一対の支持体11と、一対の支持体11の先端側に設けられ、電圧の印加により変形する保持部12とを備えたことを特徴とするマイクロピンセット10である。また、基板を載置固定するステージと、ステージの上方に配置されたマイクロピンセット10と、マイクロピンセット10に電圧を印加する電圧印加部と、ステージまたは電圧印加部を移動させて、ステージとマイクロピンセット10の位置を調整する駆動部とを備えた挟持装置およびマイクロピンセット10を用いた挟持方法である。
(もっと読む)
1 - 6 / 6
[ Back to top ]