
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
1 - 20 / 834
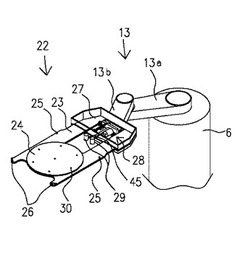
薄板状物の把持装置、および薄板状物の把持方法
【課題】
摩擦による塵埃の発生及び飛散を抑制し、従来の搬送ハンドからの置き換えが容易に且つ安価に出来、軽量で、かつ狭隘な場所にもアクセス可能な薄型の把持装置を提供すること。
【解決手段】
把持装置22は、内部に圧縮気体流通のための流路36と、圧縮気体を噴出させる噴出口30を有する搬送フィンガ23と、搬送フィンガ23先端に固定された第1の把持部材26と、駆動手段28によって動作させられる第2の把持部材29とを具えている。圧縮気体の噴出力によって浮上させられた薄板状物の周縁部を、第1の把持部材26と第2の把持部材29とで、位置ずれ補正を行いながら把持する。
(もっと読む)
脚式ロボット、その制御方法、及び制御プログラム

【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
パラレルリンクロボット
【課題】出力部材102のx、y、z方向の移動、及び、出力部材102の回動を、簡単な制御で行える構造を実現する。
【解決手段】出力部材102と第1、第2モータ104、105との間にそれぞれ第1、第2リンク機構106、107を設ける。そして、出力部材102の回転軸とz軸との平行を保持しつつ、第1、第2モータ104、105の駆動により出力部材102をxy平面に沿って移動させる。出力部材102と第3モータ108との間に第3リンク機構109を設け、出力部材102のxy平面の移動に追従しつつ、第3モータ108の駆動により出力部材102をz軸方向に移動させる。出力部材102と第4モータ110との間に第4リンク機構112を設け、出力部材102の位置に拘らず第4モータ110の駆動により出力部材102を回転させる。
(もっと読む)
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
パラレルリンクロボット
【課題】クリーンな環境でワークに対して作業等を行える構造を実現する。
【解決手段】第1、第2モータ104、105により出力部材102を水平方向に移動させる。第3モータ108により出力部材102を鉛直方向に移動させる。第4モータ110により出力部材102を鉛直軸回りに回動させる。出力部材102と第1、第2、第3、第4モータ104、105、108、110との間にそれぞれリンク機構106、107、109、112を設ける。そして、出力部材102を鉛直方向に対して傾斜させることなく、鉛直方向及び水平方向に移動可能、且つ、出力部材102を鉛直軸回りの回転可能とする。更に、第1、第2、第3、第4モータ104、105、108、110を、出力部材102の移動領域に対して水平方向に外れた位置に配置する。
(もっと読む)
多関節ロボット
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
関節装置
【課題】ロボットの関節装置において、第1連結部と第2連結部の相対回転角度を規制する機構を持ちながらも、360゜を超える相対回転角度を実現する。
【解決手段】第1連結部1と第2連結部2を軸受部を介して連結し、第1連結部1に設けられた第1ストッパーピン6と、第2連結部2に設けられた第2ストッパーピン8と、第2連結部2と同心でフリーに回転可能な中間リング7と、を備え、中間リング7は、第1ストッパーピン6に対して第1回転角度(θ1)だけ回転可能にする突出部7dと、第2ストッパーピン8に対して第2回転角度(θ2)だけ回転可能にする凹部7dと、を備え、突出部7dと凹部7eのいずれか一方により、それ以上の回転が規制された後も、突出部7dと凹部7eのいずれか他方により回転が規制されるまで、第1連結部1と第2連結部2の相対回転角度を最大で、(θ1+θ2)まで許容する。
(もっと読む)
ロボット駆動方法及びロボット
【課題】回生エネルギーの発生自体を抑制しつつ、外力やロボットの状態変化に対して強い動作を行なわせることができる駆動方法を提供する。
【解決手段】目標位置に向かって可動部を移動させる際に、駆動力を動力発生部に発生させることにより、可動部を目標位置に向けて加速を行なわせる加速工程のステップS104と、一定速にするよりも動力発生部における発生力の小さい制御を行なう予備減速工程のステップS105と、目標位置に向かう方向とは逆方向の駆動力を発生させて可動部を減速させ目標位置に停止させる減速停止工程のステップS106を行なわせる。この際に予備減速工程のステップS105の一部において予備減速推移演算工程S102で演算した指令速度を基にした速度制御を行なう。
(もっと読む)
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
直線運動リンク機構とこれを用いた布物のたぐり展開装置
【課題】小さな形状で布辺を把持し、2つのグリッパーで持った布辺部をたぐりだし両端を把持して展開して排出するロボットハンドおよび行程長よりも本体サイズが小さな直線運動機構を提供する。
【解決手段】菱形リンク機構と、その対角線上の両支点を両端で挟むように連結した2つの同じ長さの挟持リンク機構と、挟持リンク機構どうしを連結する支点と菱形リンク機構の他の一つの支点を両端で連結した2つの同じ長さの駆動リンク機構からなる直線運動リンク機構。および前記直線運動リンク機構と2連の平行四辺形4節リンクを結合するリンク機構。2連の平行四辺形4節リンク機構を連結するリンクは支点を共有しない選択肢を持つリンク機構およびこれをもちいた布物のたぐり展開装置。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ロボット、ロボットシステムおよび回転電機
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
水平多関節ロボット及び水平多関節ロボットの制御方法
【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
ロボットハンド
【課題】把持ストロークを可変にしつつ、軽量化かつ小型化できるロボットハンドを提供する。
【解決手段】ワークを把持するロボットハンド10であって、水平方向に配置されるサーボモータ21と、鉛直軸Pを中心とする平面視における仮想円Rの円周上に配置される複数のツメ60と、サーボモータ21の水平軸周りの回転を、鉛直軸P周りの回転に変換する第1変換機構30と、鉛直軸P周りの回転を、鉛直軸P方向の直線移動に変換する第2変換機構40と、鉛直軸P方向の直線移動を、仮想円Rの径方向Dの直線移動に変換する第3変換機構50と、を具備し、ツメ60は、第3変換機構50によって、仮想円Rの径方向Dに移動する。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】高精度の位置決めを容易に行うこと。
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
水平多関節ロボット
【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
膝関節運動補助装置
【課題】膝関節運動補助装置を円滑に動作させる。
【解決手段】本発明の膝関節運動補助装置は、上腿部に装着される上腿装着部と、下腿部に装着される下腿装着部と、上記上腿装着部及び下腿装着部の膝関節側端部間を回転可能に連結する連結部と、この連結部を中心にして上記上腿装着部と下腿装着部とを相対的に回転運動させながら上記膝関節側端部間を前後方向に相対的にスライド運動させる駆動部とを備えた膝関節運動補助装置において、上記駆動部が、周縁カムと、この周縁カムの外周縁に配置される駆動歯車と、当該周縁カムの内周面に形成されるカム溝と、当該カム溝と係合するカムフォロアと、を有し、この周縁カムとカムフォロア及び駆動歯車とが上記上腿装着部及び下腿装着部の一方と他方に夫々取り付けられ、上記周縁カムの外周縁には、上記駆動歯車が係合する歯列が形成され、上記駆動歯車の回転により上記周縁カムと上記カムフォロアとが回転すると上記回転運動及びスライド運動が生じるようにした。
(もっと読む)
ロボットハンド及びロボット装置
【課題】簡素に低コストで異種形状や寸法違いを含む多種の対象物を把持することが可能なロボットハンドを提供する。
【解決手段】第1の指部103と第2の指部104とを含む3以上の指部と、3以上の指部を開閉動作させる駆動部MTRと、第1の指部103と第2の指部104の開閉動作を行う向きを変更する指部移動機構と、を備え、指部移動機構は、ウオームホイール131と、モーターと、ウオーム133と、を備え、第1の指部103にはウオーム133の回転に連動してウオーム133の回転方向とは異なる方向に回転する第1歯車141が設けられ、第2の指部104にはウオーム133の回転に連動して第1歯車141の回転方向とは反対の方向に回転する第2歯車142が設けられており、第1の指部103と第2の指部104とは、モーターが回転することにより互いに近づく方向もしくは遠ざかる方向に回転する。
(もっと読む)
ワーク搬送装置
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
1 - 20 / 834
[ Back to top ]