
Fターム[3C007HT01]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556)
Fターム[3C007HT01]の下位に属するFターム
ベルト (274)
チェーン (25)
ロープ、ワイヤー (179)
複数の動作を同時又は連動して行うもの (14)
テンション調整するもの (38)
ロッドで連結するもの (1)
有端なもの (16)
Fターム[3C007HT01]に分類される特許
1 - 9 / 9
着座動作支援装置
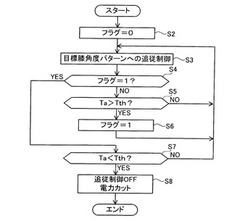
【課題】イスの座面高さが不明であっても適切に着座動作を支援することのできる着座動作支援装置を提供する。
【解決手段】支援装置は、大腿リンク、下腿リンク、ジョイント、モータ、及び、コントローラを備える。大腿リンクと下腿リンクは、ユーザの大腿と下腿にそれぞれ装着される。ジョイントは、大腿リンクに下腿リンクを揺動可能に連結する。モータは、ジョイントを駆動し、大腿リンクに対して下腿リンクを揺動させるトルクを発生する。コントローラは、膝角度が目標膝角度に一致するようにモータを制御する。コントローラは、さらに、目標膝角度が経時的に小さくなる目標膝角度パターンに実際の膝角度が追従するようにモータを制御するとともに、目標膝角度パターンへの追従制御中に所定の着座判定条件が成立したときに追従制御を終了する。
(もっと読む)
関節駆動装置及び多軸マニピュレータ

【課題】関節駆動装置の数を関節の数と等しくすることができ、駆動力伝達用の線状部材の経路長の変化を各関節部で解消することができるとともに、駆動力伝達用の線状部材の交換を短時間で容易に行うことができ、利便性を高めることができるようにする。
【解決手段】所定のリンク部材と次のリンク部材とを回転可能に接続する関節軸上に配設された関節部の駆動用の線状部材から駆動力を受けて回転することによって所定のリンク部材に対して次のリンク部材を回転させる被駆動部材と、関節軸上に配設された経路長補償ユニットであって、所定のリンク部材に対応して配設された他の関節部の駆動用の線状部材からの駆動力を、次のリンク部材に対応して配設された他の関節部の駆動用の線状部材に伝達するとともに、他の関節部の駆動用の線状部材の経路長の変化を吸収する経路長補償ユニットとを有する。
(もっと読む)
人工筋肉及び柔軟関節機構
【課題】使用目的・使用状況に応じ剛性を任意に構成可能な駆動機構とそれを用いた柔軟関節機構を提供する。
【解決手段】駆動基盤本体に固定された二台のサーボモータとアームに固定されたプーリとの間を、複数の弾性体を束ねてなる負荷変位特性生成部1013を介して接続し、拮抗機構を構成する。複数の弾性体は例えばゴムであって、長さを異ならせることによって、サーボモータで引張したときに伸び始める点、すなわち発火点が異なるようにする。二台のサーボモータを反対方向に駆動すればプーリが回転し関節が回転する。同一方向に駆動すればプーリすなわち関節は回転しないが負荷変位特性生成部が伸縮し、プーリすなわち関節の回転剛性を可変できる。弾性体が複数あることから負荷変位特性は折れ線とすることができる。
(もっと読む)
ロボットハンドの駆動機構
【課題】自在に曲げ変形或いは撓み変形した状態でも回転力を伝達できるフレキシブルシャフトを用いることにより、設計自由度が高く、且つ、十分に実用性のあるロボットハンドの駆動機構を提供する。
【解決手段】モータの回転力が減速機20を介して入力されるロボットハンド10の駆動機構であって、前記モータの回転力は、ガイドチューブGで外周が覆われたフレキシブルシャフトSを介して、前記減速機の入力軸20に伝達される、ことを特徴とする。
(もっと読む)
連結アクチュエータを有する球形ヒンジを実装するヒューマノイドロボット
本発明は、連結アクチュエータを有する球形ジョイント(10、100、200)を使用するヒューマノイドロボット(5)及び球形関節を使用する方法に関する。本発明は、擬人化に最も近づくヒューマノイドロボットの製造に特に実用的である。ジョイント(10、100、200)は、ロボット(5)の2つの要素(101、103;105、104;101、102)を接続する。ジョイントは、3つのアクチュエータ(20、35、36)によって動かされ、第1のアクチュエータ(35)及び第2のアクチュエータ(36)は平行に作用しかつ共に連結され、第3のアクチュエータ(20)は、軸線(13)周りに第1の2つのアクチュエータと直列に作用する。本発明によれば、第3のアクチュエータ(20)の軸線は、擬人化に近づくために運動角度範囲が最大でなければならない軸線である。 (もっと読む)
パラレルリンク型作業装置
【課題】周囲の物体との干渉の危険性を低減したパラレルリンク型作業装置。
【解決手段】各動力伝達部は、リンクLK、ジョイントJ3、ロッド10、ジョイントJ4で構成され、ジョイントJ3はリンクLKとロッド10の一端を接続し、ジョイントJ4は、可動部MVとロッド10の他端を接続する。ロッド10は一方側に凸の湾曲部または屈曲部を持ち、その姿勢は、軸線G、H回りの相対回転のみ許容する自由度2の各ジョイントJ3で、凸側が各リンクLKの位置に拘らず、ベース中心側を向いたままに維持される。ロッド姿勢維持手段として、一端がロッド10の湾曲または屈曲個所に接続され、他端がベース上に接続された弾性を有する紐状の部材を利用することもできる。
(もっと読む)
ねじれ紐式アクチュエータ
【課題】小型モータを用いて軽量、省スペース、低騒音で、かつ、スラスト方向の引っ張り力が大きくなっても回転駆動出力が低下しにくい安価なねじれ紐式アクチュエータを実現する。
【解決手段】モータ2とその回転軸に接続された動力伝達機構の互いに異なる2本の出力軸41、42と、これら出力軸に接続される2本のねじれ紐とを備え、各ねじれ紐は、2本の紐を互いにねじり合わせた構造を有し、他端側が駆動対象物に接続される。駆動対象物からの反作用として出力軸41、42の軸方向に加わるスラスト力を受けるスラストベアリングが、含油焼結合金からなる円環状部材51と、それに当接して摺動可能な回転側部材441、451の円環状摺動面442、452とで構成されている。さらに好ましい構造として円環状部材51の円環状摺動面に対向する側の円環状の面に、3個以上の半球状突起部511が周方向に離間して設けられている。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、先端部に先端機構3を具えたアーム1と、該アーム1の基端部が連結されて該アーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、該テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着された複数の拘束部材5とを具え、該拘束部材5には、前記複数本のテープ41が貫通して該複数本のテープ41の相対位置を一定に保つためのガイド溝51が開設されている。
(もっと読む)
関節駆動機構およびロボットハンド
【課題】関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【解決手段】 ロボットハンド指機構の関節部を駆動する駆動素子13に、直動式アクチュエータを用いて、把持力を発生する方のアクチュエータ13bの出力は大きく設定し、把持力に関係しない方のアクチュエータ13aは出力を小さく設定することで、ロボットハンドの軽量、小型化を実現する。
(もっと読む)
1 - 9 / 9
[ Back to top ]