
Fターム[3C007HT31]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480) | バックラッシュ防止 (23)
Fターム[3C007HT31]に分類される特許
1 - 20 / 23
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】高精度の位置決めを容易に行うこと。
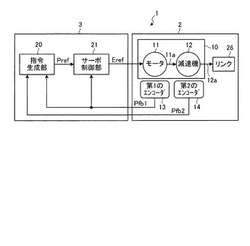
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
多関節ロボットおよびロボット関節構造

【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
屈曲関節機構並びにその屈曲関節機構を有する術具及びその屈曲関節機構を有するマニピュレータ
【課題】本発明は、ワイヤの伸びやたるみ、機構部材の公差によるガタなどによる関節機構のガタを低減すると共に、連続した屈曲関節においても少ない部品点数で屈曲機構を構成することができ、多自由度術具などの処置具の先端部を精密位置決めすることができる屈曲関節機構並びにその屈曲関節機構を有する術具及びその屈曲関節機構を有するマニピュレータを提供することである。
【解決手段】駆動ロッド13を軸方向に直動させる場合には、駆動プレート7に駆動ロッド13からの押圧力が作用し、駆動ロッド13は弾性変形領域内で梁としてたわみながら、駆動プレート7を第1の回転中心O1位置を中心に回転させる。この場合、ダブルジョイント機構では、駆動プレート7が支持部5の回転中心O1を中心に回動し、この駆動プレート7の回動動作に連動して支持部5の先端部の第1ガイドギア部8に対して、作動部6の第2ガイドギア部9が転がり回転しながら動くようにしたものである。
(もっと読む)
産業用ロボットの手首駆動構造
【課題】手首部材を支持するアームをスリム化させた産業用ロボットの手首取付構造を提供する。
【解決手段】ロボットの第2アーム14に手首部材15を揺動可能かつ回転可能に配設する。手首部材15の揺動機構は、手首部材15と連結されると共に第2アーム14に回転自在に配設された第1従動回転軸22に軸支された第1歯車21と、第1モータ61と、減速機40と、第1モータ61の回転を減速機40に伝達する第1ベルト64と、減速機40の出力側回転軸に軸支され第1歯車21と噛合する第2歯車41を有する。手首部材15の回転機構は、第2モータ66と、第1従動回転軸22と同軸に配置された第2従動回転軸31と、第2従動回転軸31の回転をこれと直交する軸の回転に変換する傘歯車35,36と、第2モータ66の回転を第2従動回転軸31に伝達する第2ベルト69を有している。第1ベルト64と第2ベルト69を同一面内で回転させる。
(もっと読む)
回転駆動機構の取付構造
【課題】歯車間のバックラッシの調整を作業者の経験等に依存することなく簡単に行うことができる回転駆動機構の取付構造を提供する。
【解決手段】従動回転機構20の第1歯車21と、回転駆動機構の1種である減速機40の第2歯車41とを噛合させる際のバックラッシを調整する。フレーム50の減速機取付部30に、同一円周上に位置するように等間隔で複数のボルト挿通孔80を形成し、減速機40のケーシング43にボルト挿通孔80と連通するように第2歯車41の回転中心に対して偏心した同一円周上に位置する複数のネジ穴70を形成する。ネジ穴70とボルト挿通孔80とが連通するようにケーシング43の取付位置を変更し、その際に第1歯車21と第2歯車41との間のバックラッシが所望の値となる状態を選び、ボルト挿通孔80を通してネジ穴70にボルト75を螺合し、ケーシング43を取り付ける。
(もっと読む)
回転駆動装置、ロボットの関節構造及びロボットアーム
【課題】バックラッシを除去、低減するとともに組立性の向上を図り、さらに出力軸のふら付きを防止できる回転駆動装置と、この回転駆動装置を用いたロボットの関節構造及びこのロボットの関節構造を備えたロボットアームを提供する。
【解決手段】不思議遊星歯車を備える回転駆動装置であって、中空主軸周りに回転自在に設けられる第1キャリア52と、遊星歯車5を回転自在に支持する第2キャリア53と、第1キャリア52と第2キャリア53とを互いに連結するとともに第1キャリア52に対して第2キャリア53を主軸と直交する方向に移動自在に案内する連結部54と、第2キャリア53を主軸と直交する方向に付勢する付勢部55とを有するという構成を採用する。
(もっと読む)
スカラロボットの手首軸回転駆動機構
【課題】アームの質量及び慣性を低減可能として、アームとしての応答性能や位置決め精度を高く維持することのできるスカラロボットの手首軸回転駆動機構を提供する。
【解決手段】手首軸16にはそれを回転させるためのスプライン溝16sが形成されている。手首軸16の挿通されるスプラインナット22は、固定筒22aと回転筒22bからなり回転筒22bが回転されると、スプライン溝16sに嵌合されるベアリングを介して手首軸16が回転される。回転筒22bには第3モータM3の駆動力が回転動力の伝達機構により伝達される。すなわち第3モータM3からの回転動力が、基端側プーリ23からタイミングベルト26を介して先端側プーリ25に伝達され、同プーリ25に連動するピニオンギア27に噛合されるシザーズギア28から回転筒22bに伝達される。これにより、第3モータM3の正逆回転により手首軸16が正逆回転されるようになっている。
(もっと読む)
ロボットハンドの指構造
【課題】ロボットハンドの指構造を効果的に小型化すること。
【解決手段】ロボットハンドの指構造10は、ロボットハンドの指付根部11の関節12を回転駆動する付根駆動部1と、指本体3の関節13を回転駆動する指本体駆動部2と、指本体3の長手方向に沿って配設され、相互に歯合する歯車列4と、を備えている。また、指付根部11の近傍には、付根駆動部1及び指本体駆動部2が併設されている。さらに、指本体駆動部2は、歯車列4を介して、指本体3の関節13を回転駆動する。
(もっと読む)
バックラッシュ量算出方法および直動型ロボット装置
【課題】 上下軸に配置されたラックとピニオンにおいて、重力の影響を受けずバックラッシュ量を容易に精度よく測定できる方法および直動型ロボット装置を提供する。
【解決手段】 本発明の直動型ロボット装置のバックラッシュ量算出方法は、減速機7を有したサーボモータ6と、減速機の出力軸に結合されたピニオン3と、上下方向に設けられピニオンに噛合するラック2と、サーボモータを保持しラック上を移動する移動体8と、サーボモータに設けられたトルクおよび回転位置を検出する検出部と、サーボモータを制御する制御部とを備え、サーボモータを回転させて移動体を下方向に移動させ、移動体より下に設けた固定台5に移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の検出部の回転位置パルス値を用いることによりラックとピニオンのバックラッシュ量を算出するものである。
(もっと読む)
回転駆動装置、ロボットの関節構造及びロボットアーム
【課題】遊星歯車と可動内歯歯車及び固定内歯歯車との間のバックラッシュを簡便且つ安価に除去、低減することができるとともに、この可動内歯歯車の出力軸の回転方向の位置精度を向上させることができる回転駆動装置と、この回転駆動装置を用いたロボットの関節構造及びこのロボットの関節構造を備えたロボットアームを提供することにある。
【解決手段】太陽歯車11と、前記太陽歯車11の中心軸Oを中心として公転する遊星歯車14と、前記遊星歯車14に噛み合う固定内歯歯車15と、前記固定内歯歯車15と異なる歯数とされ、前記太陽歯車11と同軸上に回転可能に配置されるとともに前記遊星歯車14に噛み合う可動内歯歯車16と、前記太陽歯車11を前記中心軸O周りに回転させる駆動モータ2と、前記遊星歯車14を前記可動内歯歯車16に向け付勢するための付勢手段17と、を備えることを特徴とする。
(もっと読む)
過負荷検出機構及びそれを備えた産業用ロボット
【課題】可動部の回転軸にかかる過負荷を直接検出する過負荷検出機構を提供する。
【解決手段】テーパ形状の歯車で互いにかみ合う第一および第二の歯車(1)(2)と、第一の歯車(1)が周囲に嵌合されるとともに、第一の歯車(1)を軸方向に摺動可能に保持して、第一の歯車(1)とともに回転する回転軸(3)と、第一と第二の歯車のバックラッシを除去するよう第一の歯車(1)を軸方向に沿って第二の歯車(2)の方へ付勢する付勢手段(5)と、第一の歯車(1)の外周に保持された軸受(7)と、軸受(7)の外周に保持された移動板(8)と、移動板(8)の軸方向に沿った移動を検出可能なセンサ(9)と、を備える。
(もっと読む)
バックラッシュ調整機構及びそれを備えたロボット
【課題】円錐歯車においてバックラッシュを簡単に調整できるようにし、ロボットにおいてもその調整を簡単に行えるようにする。
【解決手段】円錐歯車7におけるバックラッシュを調整するため、円錐歯車の回転軸に設けられた穴部に挿入され、円錐歯車を摺動可能に支持する動力軸3と、動力軸3の周囲に設けられたネジ部5に係合され、円錐歯車7の端部と当接する位置決め用ナット6と、円錐歯車7を動力軸3に対して固定する固定用ボルト8と、を備え、位置決めナット6をネジ部5で位置調整することで、円錐歯車7の動力軸3に対する回転軸方向の位置を移動させ、バックラッシュを調整するようにした。
(もっと読む)
ロボットハンド
【課題】バックラッシュやガタが少なく指先の位置と力を高精度に制御可能なロボットハンドを提供する。
【解決手段】掌、中手、基節を備え、掌と中手の接合部に手根中手関節と、中手と基節の接合部に中手指節関節を供えたロボットハンドにおいて、手根中手関節軸と前記中手指節関節軸が1点で直交し、掌には、手根中手関節を駆動するための第一アクチュエータと第一駆動機構を備え、基節には、中手指節関節を駆動するための第二アクチュエータと第二駆動機構を備え、第一駆動機構は、第一アクチュエータの出力を高減速手段を備えた第一減速装置で減速した後、リンク機構を介して第一減速装置の出力を中手に伝達することにより、手根中手関節を駆動するように構成するとともに、第二駆動機構は、前記第二アクチュエータの出力を高減速手段を備えた第二減速装置で減速した後、第二減速装置の出力を中手に接合することにより中手指節関節を駆動するように構成する。
(もっと読む)
産業用ロボットのアーム構造
【課題】産業用ロボットのアームにおいて、モータの回転を伝達し所望の個所を駆動させるロッドを短く、細くすることができるとともに、アーム全体容積を小さくでき、かつ組立も簡便にすることができる産業用ロボットのアーム構造を提供する
【解決手段】モータに接続されて回転し、先端に設けられた小歯車4を回転させるロッド21と、小歯車4と噛み合って回転し、アームの筐体1の先端に設けられた手首部を駆動する大歯車2、3とを設け、大歯車2、3には、同一の歯形状と同一の回転中心軸とを有する第1の大歯車2と第2の大歯車3とが重ね合わされて締結された構成であるとともに、そののフランジ面には、回転中心軸から略同一径上において、中心位置が相対的にオフセットした互いに異なる径の貫通穴を設けた。
(もっと読む)
ガタ・すべりを有する把持機構をもった複数ロボットによる協調搬送システム及び方法
【課題】リーダと搬送物、搬送物とフォロワの接続部である、リーダ及びフォロワの把持部にガタ・すべりが存在しても、協調搬送という目的を達成できるようにする。
【解決手段】フォロワ20は、把持部(フック14)に滑り、ガタがない場合には、フォロワ推定誤差から、リーダ10の軌道を推定して出力し、滑り・ガタがある場合にはリーダ10が停止するような軌道を出力するといった動作を行う。ミクロ的にはリーダ10の動きに追従して進行する軌道と停止する軌道を繰り返すことになるが、マクロ的にはリーダ10に追従するような軌道が得られる。
(もっと読む)
リンク装置および搬送ロボット
【課題】 前進時および後退時の停止位置精度を高めることができるリンク装置を提供する。
【解決手段】 リンク装置は、中間部材12上の2つの第1支軸f1において、各第1リンクアーム10,11と一体的に回転するように設けられた一対の第1歯車100,110と、中間部材12上の2つの第2支軸f2において、各第2リンクアーム20,21と一体的に回転するように設けられた一対の第2歯車200,210とを備えており、かつ、一方の第2歯車210は、第1リンクアーム10,11を所定の方向に揺動させて移動部材を前進させる場合にのみ、一方の第1歯車110と噛み合った状態で回転させられる一方、他方の第2歯車200は、第1リンクアーム10,11を所定の方向とは逆方向に揺動させて移動部材を後退させる場合にのみ、他方の第1歯車100と噛み合った状態で回転させられるように構成されている。
(もっと読む)
遊星歯車減速装置
【課題】予圧調整を簡易に行なうことのできる遊星歯車減速装置を提供する。
【解決手段】内ピン140と第1支持フランジ150を(単一の部材として)一体的に構成し、前記内ピン140の先端面140Aと第2支持フランジ160に設けた凹部146の底面146Aとの間にシム170を配置する。更に、第2軸受164の外輪164Aにおける玉164Cとの接触面を第1軸受154側へ向かうに従い半径方向内側に向かって盛り上がるように形成し、且つ、第2軸受164の内輪164Bにおける玉164Cとの接触面を反第1軸受154側に向かうに従い半径方向外側に向かって盛り上がるように形成する。
(もっと読む)
多軸制御装置
【課題】他軸駆動時の外乱トルクに対する自軸のトルク補正を高速に実施することができる多軸制御装置を得ること。
【解決手段】コントローラ1は、一方の軸に対する1軸位置指令と他方の軸に対する2軸位置指令とを所定のフォーマットでネットワーク2に向けて送出する。1軸サーボアンプ3と2軸サーボアンプ4は、それぞれ、ネットワーク2から対応する位置指令と相手に対する位置指令とを取り込む。2軸の可動部11が移動動作して横軸の正値側に向かう力F2が発生すると、この力F2による横軸の負値側に向かう反力F1が1軸の可動部7に掛かることになる。この反力F1は、1軸にとって外乱となる。1軸サーボアンプ3は、2軸用の位置指令から反力F1に相当する外乱トルクを推定してサーボモータ5に与える駆動値を補正する。
(もっと読む)
ロボットの制御装置
【課題】 バックラッシを生じる減速機を用いても十分な精度が得られ、かつ余分なエネルギの消費を抑制できる。
【解決手段】 ロボットの制御装置は、モータ11と、モータ軸12に接続されるエンコーダ13と、モータ軸12に接続され、モータ軸12の回転を減速する減速機14と、減速機14の駆動軸16に接続される位置検出器10と、駆動軸16に接続される駆動用フレーム15と、減速機14と駆動用フレーム15との間に設けられ、駆動用フレーム15に、駆動軸16の回転方向と逆方向の外部拘束力を負荷するねじりバネ18と、駆動用フレーム15の向きが所定の範囲内にある場合、ねじりバネ18から駆動用フレーム15への外部拘束力の負荷を制限する制限ピン21と、エンコーダ13および位置検出器10からの出力に基づいて、モータ11の回転を制御するモータ制御部17とを含む。
(もっと読む)
ロボットアーム
【解決手段】
ロボットアーム1は、回転自由な関節部で連結されたリンク部材で屈曲動作する構造を含む。関節部を挟んで駆動モータと被駆動関節部を配置する。駆動モータと被駆動関節部をワイヤで連結する。関節部の屈曲軸にワイヤを案内するワイヤガイドプーリを2個設ける。ワイヤを屈曲内側と外側に振り分けて巻きつけた。
【効果】
ロボットアームの先端側の重量を削減でき、アクチュエータを小型化することができる。また、関節機構の駆動負荷とガタ角度を適正化できる。さらに、機構部をカバーで覆うことにより、関節機構への人体の進入事故を防止できる。
(もっと読む)
1 - 20 / 23
[ Back to top ]