
Fターム[3C007HT39]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | クラッチを有するもの (29)
Fターム[3C007HT39]に分類される特許
1 - 20 / 29
関節駆動装置
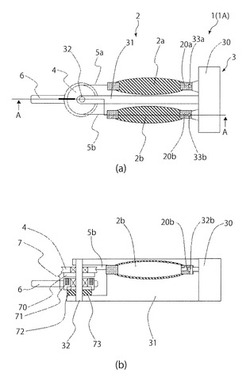
【課題】人工筋肉アクチュエータを動力源とする筋骨格型ロボット等の関節駆動装置において、装置全体を大型化することなく、可動範囲の広範化及び所定の可動範囲での高出力化が可能な関節駆動装置を提供すること。
【解決手段】支持軸32に回転自在に支持されるプーリ4と、支持軸32に回動自在に支持されるリンク部6と、第1人工筋肉2a及び第2人工筋肉2bを有し、第1人工筋肉2a及び第2人工筋肉2bの拮抗筋運動による収縮量の差により、プーリ4を回転させる人工筋肉アクチュエータ2と、を備えた関節駆動装置1において、リンク部6の回転角度を検出する原点センサと、リンク部6をプーリ4に接続させて、回転駆動力を伝達する接続クラッチ7と、を備え、人工筋肉アクチュエータ2により所定の回転角度に回転されたプーリ4と所定の回動位置に位置するリンク部6とを接続して、リンク部6のプーリに対する相対的な回動範囲を切り替える。
(もっと読む)
ロボット

【課題】外部の物体への衝撃の緩和に起因するロボットの作業量の低下を抑制することが可能なロボットを提供する。
【解決手段】このロボット100は、第1アーム部13と、第1アーム部13に対して折れ曲がり可能に接続されている第2アーム部14とを含むアーム12と、第1アーム部13側に設けられ、第1アーム部13および第2アーム部14を含むアーム12を駆動するモータ11とを備える。そして、通常時には、第2アーム部14が第1アーム部13に対して折れ曲がらずに、アーム12が駆動されるとともに、外部の物体200と衝突した時には、第2アーム部14が第1アーム部13に対して折れ曲がり、第2アーム部14がアーム12の移動方向と逆方向に移動することにより、外部の物体200への衝撃を緩和するように構成されている。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
ロボットのリンク装置
【課題】ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにする。
【解決手段】歩行脚またはアームを構成する第1および第2のリンク3、5と、リンク3、5を連結する関節7とを備える。関節は、第1および第2の関節部7a、7bを有する。第1および第2の関節部は、リンク3、5の一方に対し衝撃吸収用のガタをもって取り付けられ、リンク3、5との他方に対し関節の軸周りに回転可能に取り付けられる。第1および第2のモータ9、11は、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、回転方向のガタの大きさを調整する。
(もっと読む)
可変剛性機構及びロボット
【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
手術用マニピュレータ
【課題】指掛かり部が軸心に対して片側に偏った位置に形成された既存の鉗子を位置決めし、且つ、鉗子を開閉させる機構を有し、鉗子開閉時に生じる回転モーメントを吸収することのできる手術用マニピュレータを提供する。
【解決手段】指掛かり部122,124が軸心に対して片側に偏った位置に形成された鉗子120を装着可能な保持手段61を具える支持台60と、前記鉗子の指掛かり部を開閉させる開閉機構70と、該支持台を複数の軸回りに回転可能に保持する回転台50と、該回転台を平面方向及び/又は垂直方向に直線及び/又は回転作動可能に支持するアーム部30と、を有する手術用マニピュレータであって、回転台は、アーム部に対する支持台の各軸回りの回転を固定するロック機構51,55,57を有する。
(もっと読む)
多関節アームおよび搬送装置
【課題】並進する多関節アームを提供する。
【解決手段】多関節アーム100は、ベース10と第1のリンク110で連結した第1のアーム101と、第1のアーム101と中間リンク130で連結した第2のアーム102と、第2のアーム102と第2のリンク120で連結したエンドエフェクタ200とを含む。第1のリンク110は、第1のアーム101に対して同期して動く第1の駆動歯車111と、ベース10に対して同期して動く第1の伝達歯車112とを含む。中間リンク130は、第2のアーム102に対して同期して動き、第1の伝達歯車112とタイミングベルト139により接続された中間の駆動歯車131と、第1のアーム101に対して同期して動く中間の伝達歯車132とを含む。第2のリンク120は、エンドエフェクタ200に対して同期して動き、中間の伝達歯車132とタイミングベルト129により接続された第2の駆動歯車121を含む。
(もっと読む)
駆動力解放装置
【課題】歯付部材を任意の方向へ制動したり駆動力を解放して自由移動可能にしたり駆動して移動させたりし得るようにすることにある。
【解決手段】第1ワンウェイクラッチ1と、第1ワンウェイクラッチの第1部材に出力軸を結合された第1モータ3と、第1ワンウェイクラッチの第2部材に結合された第1歯車5と、第2ワンウェイクラッチ2と、第2ワンウェイクラッチの第1部材に出力軸を結合された第2モータ4と、第2ワンウェイクラッチの第2部材に結合された第2歯車6と、第1歯車および第2歯車と噛合する歯付部材7とを具えてなる駆動力解放装置である。
(もっと読む)
ハンドおよびその動作方法
【課題】本発明は、把持対象物を破損することなくあらかじめ設定したある一定の把持力で把持でき、把持対象物の形状に倣って包み込むように把持でき、しかも比較的簡単な構成でこれを実現できるハンドを提供する。
【解決手段】基部1と、前記基部1に固定される回転駆動機構2と、前記回転駆動機構2と連結される少なくとも2つのリンク3を備えたハンドにおいて、各リンク3は関節に動力伝達部品4とラチェット機構5を有し、前記回転駆動機構2は各関節に備えられた動力伝達部品4およびラチェット機構5にベルト6を介して連結されていることを特徴とするものである。
(もっと読む)
歩行ロボット
【課題】 本発明は、ピッチ方向大腿部関節及び膝関節の駆動構造が改善された歩行ロボットを提供するためのものである。
【解決手段】 本発明に係る歩行ロボットは、大腿リンクが上体に対してピッチ方向に回転されるように第1ピッチ方向の大腿部関節を駆動する第1ピッチ方向アクチュエータと、下腿リンクが大腿リンクに対してピッチ方向に回転されるように第1ピッチ方向アクチュエータの駆動力を上記膝関節に伝達する動力伝達装置を具備して構成される。
(もっと読む)
マニピュレータ
【課題】アクチュエータ部と作業部とを装着する際に、作業部の個体情報の誤認識を防止することができるマニピュレータを提供する。
【解決手段】マニピュレータ10は、アクチュエータブロック30と、アクチュエータブロック30に対して着脱自在な作業部16と、作業部16の動作を制御するコントローラ514とを備える。前記アクチュエータブロック30には係合凹部41a〜41cが設けられ、前記作業部16には係合凸部51a〜51cが設けられ、係合凸部51a〜51cは作業部16の種類に応じて異なる角度に設定されると共に、係合凹部41a〜41cと係合凸部51a〜51cとは、互いに所定の係合角度に設定されている場合にのみ係合可能に構成される。
(もっと読む)
多脚型走行装置
【課題】歩行移動ができ、かつ前方に車体底部高さに匹敵する高い段差がある場合でも、従来の静歩行よりもスムーズに、かつ段差から滑り落ちることなく、その段差を乗り越えることができる多脚型走行装置を提供する。
【解決手段】フラットな底面12aを有する車体12と、車体の移動方向に直交する水平軸を中心に一端14aが揺動可能に取り付けられ、中間部に関節14bを有し、他端に路面と接する足部15が取り付けられた4以上の脚14とを備える。脚と関節は、前後に揺動又は屈曲させて車体を歩行移動させる。さらに車体12の底面より下方に位置し、路面4と接触する際に車体の後方への移動を防止する後退防止機構16を備える。
(もっと読む)
多関節指部材並びにロボットハンド及びその制御方法
【課題】共通の駆動源によって駆動される複数の関節を有する指部材にて、これら複数の関節の関節角度が任意の角度に設定された状態を作り出すことを可能とする。
【解決手段】多関節指部材2は、駆動モータ200と、駆動モータ200によって駆動される第1関節20と、第1関節20に一端が固定された第1リンク21と、第2リンク23と、第2リンク23を回動可能に第1リンク21の他端に結合し、第1関節20と共通の駆動モータ200によって駆動される第2関節22と、クラッチ機構212とを備える。ここで、クラッチ機構212は、第1関節20の駆動に要する駆動トルクの増大に応じて駆動モータ200から第1関節20への動力伝達を抑制するとともに、第1関節20への動力伝達が抑制された状態において第1関節20の駆動に要する駆動トルクが減少したことに応じて、即座に駆動モータ200から第1関節20への動力伝達を回復させる。
(もっと読む)
クラッチ機構及びロボットハンドの指駆動機構
【課題】ロボットハンドの指駆動機構の駆動部を構成する歯車の歯や軸に過負荷が作用するのを防止する。
【解決手段】射出成形樹脂フェースギヤ5は、コイルスプリング9によって下方から弾性的に付勢されており、このコイルスプリング9のばね力を受けて第1歯車20と噛み合っている。コイルスプリング9は、予め圧縮された状態で軸22の外周側の穴21内に収容されており、射出成形樹脂フェースギヤ5と第1歯車20が所定の接触圧力で噛み合うように、その圧縮量(プリロード)が設定されている。ここで、コイルスプリング9は、第1歯車20と射出成形樹脂フェースギヤ5との噛み合い部分に過負荷が作用し、射出成形樹脂フェースギヤ5を押し下げる方向に作用する力がプリロードよりも大きくなると、押し縮められる方向へ弾性変形し、射出成形樹脂フェースギヤ5の歯と第1歯車20の歯の噛み合いを解除する。
(もっと読む)
ワイヤ駆動機構、ロボットアーム機構及びロボット
【課題】軽量で、コンパクトにできるワイヤ駆動機構、ロボットアーム機構及びロボットを提供する。
【解決手段】回転軸2を中心に回転するプーリ1と、回転軸2と直交する方向で、回転軸2と同一平面上にあるように配置される回転軸4を中心に回転するプーリ3と、プーリ1周面の所定方向に巻きつけられるとともに、プーリ3周面にプーリ1の巻きつけ方向と反対方向に巻きつけられるワイヤ5を有し、一方のプーリ1の回転によるワイヤ5の引っ張り力により他方のプーリ3に駆動力を伝達可能にする。
(もっと読む)
ロボットおよび制御方法
【課題】小型軽量物の細かい把持と重量物の安定な把持を共に実現可能で、駆動手段に無理な負荷を加えることがなく、さらに直接教示や原点復帰動作が容易な、汎用性の高いロボットを提供する。
【解決手段】基部1と、前記基部1上に配置される少なくとも2つのリンク機構4と、前記リンク機構4を屈曲伸展可能な駆動手段3と、前記駆動手段3を制御する制御手段10とを備えたロボットにおいて、少なくとも1つの駆動手段3は、他の駆動手段3よりも大きい駆動力を有し、他の駆動手段3は、自らの駆動力よりも大きい外力に対して他動的に変位するものである。
(もっと読む)
ツーウェイクラッチ及び関節部構造
【課題】軽量で、バックラッシュの無いツーウェイクラッチ及び関節部構造を提供する。
【解決手段】本発明のツーウェイクラッチ1では、係合子が軸方向に互いに重複しない位置に配置された第1の係合子8と第2の係合子9とからなる。第1の係合子8は第1の保持器10により保持され、第2の係合子9は第2の保持器11により保持されている。第1の係合子8が円筒面3とカム面5に係合して内方部材2と外輪4の一方向の相対回転を阻止するとともに第2の係合子9が円筒面3とカム面5に係合して内方部材2と外輪4の他方向の相対回転を阻止する状態とすることにより内方部材2と外輪4の両方向の相対回転を阻止する。
(もっと読む)
小型移動ロボット
【課題】人が通れないような狭隘部、配管内を移動可能なほど小型で、かつ不整地、階段等を自由に移動する移動ロボットを提供する。
【解決手段】本体12、左右の走行車輪20、および伸縮アーム32を有する伸縮アーム装置30を備える。走行車輪20は、走行用モータ14により回転駆動されるウォームギヤ22と、ハウジング24と、弾性を有する薄肉のリング状部材である複数のウォームホイールリング26と、ハウジングとウォームギヤ又は本体を排他的に連結するクラッチ28とを備える。クラッチ28でハウジングとウォームギヤを連結して、走行車輪全体を回転駆動し回転軸に交差する方向に移動し、クラッチ28を切替えてハウジングと本体を連結し、ウォームホイールリングの半径方向内側部分を軸線方向に駆動して、回転軸の軸線方向に移動する。
(もっと読む)
可動軸駆動装置およびロボット装置
【課題】複数の可動軸を少ない動力で駆動するとともに、動力から遮断したり外力が加わった場合にも関節の自由かつ自然な動きを担保する。
【解決手段】本発明の可動軸駆動装置は、1本の主軸上に配設された1以上の可動軸ユニットと、前記主軸を回転駆動する動力手段とを具え、前記可動軸ユニットがそれぞれ、駆動対象部位へ動力を伝達する巻き取りドラムまたはクランクと、前記主軸と前記巻き取りドラムまたはクランクとを伝達トルクを調整可能に接続あるいは断続するクラッチと、一端が前記巻き取りドラムまたはクランクに固定され他端が装置フレームに固定されたコイルバネとを具える。
(もっと読む)
管内走行装置
【課題】曲管においても滞留することなく、効率良く推進力を伝達させて走行することが可能な管内走行装置を提供する。
【解決手段】管内走行装置1は、進行方向Aと略直交する側方Sに当接部材53、63を張り出して管路の壁面に当接させることで、壁面から進行方向Aに推進力を発生させることが可能な推進手段50、60を有した複数の駆動ユニット3と、駆動ユニット3間を連結するとともに、可撓性を有して管路の軸方向の形状に応じて変形可能な連結部7と、各連結部7の変形状態を検出可能な連結状態監視部と、連結状態監視部の検出結果に基づいて、各駆動ユニット3の推進手段50、60を制御する制御部10とを備える。
(もっと読む)
1 - 20 / 29
[ Back to top ]