
Fターム[3C007JS02]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 制御盤等を含むシステム全体の構成 (484) | 他のロボット等周辺装置と関連するもの (448)
Fターム[3C007JS02]の下位に属するFターム
ネットワーク対応 (181)
Fターム[3C007JS02]に分類される特許
1 - 20 / 267
ピッキング用ワーク供給装置、およびワークピッキング装置
【課題】
バラ積みされたワークの位置と姿勢を確実に変化させ、新たなバラ積み状態を生成するピッキング用ワーク供給装置、および当該ピッキング用ワーク供給装置を用いたワークピッキング装置を提供する。
【解決手段】
ワーク供給装置に、複数のワークをバラ積み可能な上方が開いた容器本体と、前記容器本体の底部から上方内側に進退自在に設けられた突出部と、前記突出部を進退自在に動作させる突出駆動部と、を備えている。
(もっと読む)
作業システム

【課題】作業システムの設備コストを抑えること。
【解決手段】作業システム1は、作業対象であるワークに対して所定の作業を行うロボット12と、ワークに対する所定の作業が行われる場所である複数の作業ステーション13a〜13dとを備える。そして、ロボット12は、作業ステーション13b,13cにおいてワークに対して圧入作業やネジ締め作業といった所定の作業を行うだけでなく、作業ステーション13a〜13d間でのワークの搬送も併せて行う。
(もっと読む)
ロボット制御装置、教示装置及びロボットシステム
【課題】
教示装置と通信が確立していないときに、障害が発生したロボット制御装置側から教示装置に対して通信確立を要求するため、複数のロボット制御装置の中から作業者が、障害が発生しているロボット制御装置との通信を迅速かつ正確に確立することができるロボット制御装置、教示装置及びロボットシステムを提供する。
【解決手段】
ロボット制御装置20の通信制御部22は障害が発生したときに、特定のティーチペンダント10と無線通信が確立していない場合、特定のティーチペンダント10に関する接続先情報を宛先にした通信確立要求を出力する。第3記憶部24cは返信された特定のティーチペンダント10に関する送信元の固有の送信元情報を記憶する。通信制御部22は通信確立要求応答があった後、送信元情報を宛先として、返信したティーチペンダント10に対して交信を行う。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
連結移動装置
【課題】移動体が目標地点へ移動している途中で、バッテリー残量が低下しても、当該移動体が継続して移動できるようにする。
【解決手段】連結移動装置10は、不整地上を移動する複数の移動体3と、これらの移動体3を連結し電力を伝達可能な線状体5とを備える。複数の移動体3が、線状体5で連結された状態で移動する。各移動体3は、不整地上を移動するための移動手段と、給電されることにより該移動手段を駆動する駆動装置と、移動用エネルギーを蓄積し該エネルギーを用いて駆動装置に給電する給電装置と、を有する。各移動体3の給電装置は、他の移動体の給電装置から線状体5を介して電力を受けられるようになっている。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム
【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Aは、ワークWをシステム20Fから受け取るとともに、ワークWをシステム20Bへ引き渡す載置台22Aを備える。システム20Aは、システム20Aの載置台22Aからシステム20Bの載置台22BへワークWを受け渡すロボット30Aと、載置台22AにおいてワークWに対して作業を行う作業装置21Aとを備える。システム20Aは、ロボット30Aに設けられたRFIDタグ33Aと、ロボット30FがワークWを載置台22Aへ受け渡す際に、RFIDタグ33Fの情報を無線で読み込むリーダライタヘッド25Aと、ロボット30AがワークWを載置台22Aから引き渡す際に、RFIDタグ33Aに情報を無線で書き込むリーダライタヘッド25Aと、を備える。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Bは、ワークWを受け取る受取り部と、ワークWを引き渡す引渡し部とを備える。システム20Bは、システム20Aの引渡し部からシステム20Bの受取り部へワークWを受け渡すロボット30Bと、受取り部から引渡し部へワークWを搬送するベルトコンベア22Bと、ワークWに対して作業を行う作業装置21Bとを備える。システム20Bは、ロボット30Bに設けられたRFIDタグ33Bと、ロボット30BがワークWを受取り部へ受け渡す際に、RFIDタグ33Bの情報を無線で読み込むリーダライタヘッド23Bと、ロボット30BがワークWを引渡し部から引き渡す際に、RFIDタグ33Bに情報を無線で書き込むリーダライタヘッド25Bと、を備える。
(もっと読む)
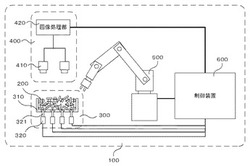
作業装置及び部品ピッキングシステム
【課題】マニプレータを用いた作業装置及び部品ピッキングシステムを提供する。
【解決手段】作業装置9は、マニプレータ11と、マニプレータ11の可動範囲内に配置された作業台17と、作業台17に載せられた部品の2次元画像を撮像する撮像装置100と、2次元画像から部品の位置を最適に検出できる程度に予め設定された分量だけ、作業台17に部品を供給する部品供給手段11と、マニプレータ11及び撮像装置100の動作を制御する制御システム150とを備える。
(もっと読む)
作業ツール用線条体の配索方法及び配索装置
【課題】ロボットの動作制限を解消しつつ実施する作業種類の制約を抑制できる作業ツール用線条体の配索方法及び配索装置を提供する。
【解決手段】ツールスタンド3に待機保持され且つロボット4の手首に選択的に着脱される作業ツールTと作業ツール用制御盤5とを接続する配線及び配管の少なくとも一方を含む線条体としてのケーブルガイド7の配索装置である。前記ツールスタンド3に回転可能に配置され前記作業ツールTに先端を接続した線条体の中途部を巻掛け保持する回転ドラム8を備える。そして、前記回転ドラム8に巻掛けた線条体の後端側に対して下方へ牽引力を付与して、前記作業ツールTの移動に伴い回転ドラム8の前方に引出される線条体に対して予め設定した引張り力を付与する付勢手段としてのスプリングバランサ12を備える。
(もっと読む)
移動型ロボットシステム
【課題】 自律移動や自律作業が可能な移動型ロボットにおいて、充電による可動範囲の制限や作業内容の制限を受けずに、作業を継続可能な技術を提供する。
【解決手段】 移動して所定の作業を自律的に実行する移動型メインロボット(10A)と、その移動型メインロボット(10A)に対して装着可能であるとともに移動型メインロボット(10A)とは別に移動可能な移動型サブロボット(20A,20B,20C,20D)と、その移動型サブロボット(20C)に対して充電を実行する充電装置(30)とを備える。移動型メインロボット(10A)は、電気エネルギを供給するメインバッテリ(11)を備える。前記移動型サブロボットは、前記の移動型メインロボット(10A)に装着された場合に前記メインバッテリ(11)へ電気エネルギを充電する内蔵バッテリを備える。移動型メインロボット(10A)に装着されていない場合であって内蔵バッテリの電気エネルギが少ない場合には、充電装置(30)へ自律移動して充電する。
(もっと読む)
作業ロボット用エンドエフェクタ交換装置およびその一部を具える作業ロボット
【課題】取り扱う製品や部品の形状に合ったピッキング用ハンドや、ネジ締めドライバ、半田ごて等の作業ツールを素早く交換することが可能で、かつ位置決め用スタンド等の専用治具を必要としない作業ロボット用エンドエフェクタ交換装置を提供することにある。
【解決手段】各々識別標識を持つ複数のエンドエフェクタと、前記エンドエフェクタを任意の場所に保持するエンドエフェクタ置場と、前記エンドエフェクタ置場に保持された前記エンドエフェクタの前記識別標識を撮像する撮像手段と、前記撮像手段が撮像した前記エンドエフェクタの前記識別標識の画像に基づき前記エンドエフェクタの3次元位置を算出するエンドエフェクタ位置算出手段と、前記算出したエンドエフェクタの3次元位置を作業ロボットの作動制御装置に教示するエンドエフェクタ位置教示手段と、を具えてなる作業ロボット用エンドエフェクタ交換装置である。
(もっと読む)
作業システム、作業ロボット制御装置および作業プログラム
【課題】各トレイ上の部品の位置等が変更されても、効率的にその部品を認識して作業動作を実行できる作業システムを提供することを目的とする。
【解決手段】この作業システムは、移動可能に配置された複数のトレイ4を、低空間分解能・広視野の画像上で認識した後、高空間分解能・狭視野の画像処理を行うことで、トレイ4に載置される部品3を特定し、トレイ4の配置位置を認識する。トレイ認識段階では低空間分解能であるため大量の画像処理を必要とせず、また部品認識段階では狭視野であるため大量の画像処理を必要としない。よって、当該トレイ4に載置される部品3の3次元位置・姿勢を効率的に認識できる。この2段階の画像認識によって、作業ロボット2による作業動作を効率的に行うことができる。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
生産システム
【課題】ワークを把持したロボットが複数の処理装置間を順次移動してワークを製品化する生産システムにおいて、ロボットと処理装置との間のワークの授受位置を自動で効率的に取得可能とし、システムのフレキシビリティの向上を図る。
【解決手段】処理装置4は、指向性のある無線の通信部41を備え、ロボット3は、処理装置4の通信部41との間で相互に通信する指向性のある無線の通信部31と、処理装置4上の所定の特徴点42を撮像して位置認識を行う画像処理部(CCDカメラ32a)と、ハンド部33と、を備え、ロボット3は、相互の通信部31,41を用いて処理装置4に対する位置関係を検出し、その検出の後に、画像処理部を用いて特徴点42を認識することにより処理装置4に対する精密な位置関係を検出し、これに基づいてワークの授受位置を取得する。2段階の位置検出により、狭いカメラの撮像範囲で精度良く効率的に位置を取得できる。
(もっと読む)
1 - 20 / 267
[ Back to top ]