
Fターム[3C007JS03]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 制御盤等を含むシステム全体の構成 (484) | 他のロボット等周辺装置と関連するもの (448) | ネットワーク対応 (181)
Fターム[3C007JS03]に分類される特許
1 - 20 / 181
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
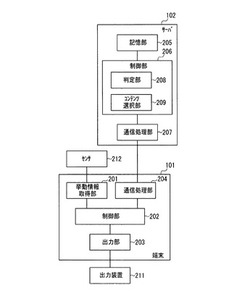
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
ロボット制御システム

【課題】複数の可搬式操作装置を1台のロボット制御装置に同時接続した場合、教示機能が有効な可搬式操作装置を識別できない。
【解決手段】ロボット制御システム1は、ロボットRと、教示操作信号を送信する可搬式操作装置TPと、教示操作信号を受信してロボットRへの教示作業を行う教示機能を有する制御装置RCにより構成される。制御装置RCは、可搬式操作装置TPとの無線通信を確立する際に、可搬式操作装置TP毎に教示機能を有効化又は無効化する通信確立手段を備える。可搬式操作装置TPは、無線通信の確立状態を示す通信状態表示灯3と、教示機能の有効/無効を示す非常停止スイッチ4とを備える。通信確立の際に、現在の接続数が0の時に前記教示機能を有効化し、1以上の時は無効化したモニタモードを選択する。可搬式操作装置TPの接続形態が表示されるので教示に使用できる装置を容易に判別できる。
(もっと読む)
操作環境モデル構築システム、および操作環境モデル構築方法
【課題】作業ロボットの導入環境のモデル化負担を低減すること。
【解決手段】操作環境モデル構築システム100は、被操作体の計測により得られる立体像に対して幾何プリミティブを適応させて被操作体の幾何的特性を示す幾何情報を生成し、幾何情報の生成対象である被操作体の空間位置を示す位置情報を取得し、被操作体に対して作業ロボットにより行われるべき操作内容を示す操作情報を、生成された幾何情報及び取得された位置情報に対して関連付けて記憶する。被操作体に対して操作タグを仮想的に設定することができ、作業ロボットの導入環境のモデル化負担の低減を図ることができる。
(もっと読む)
マスタ・スレーブ型ロボット操作システム
【課題】安価で操作性に優れたマスタ・スレーブ型ロボット操作システムを提供する。
【解決手段】マスタ・スレーブ型ロボット操作システムは、操作者によって操作されるマスタ操作装置10と、遠隔操作されるスレーブロボット装置と、マスタ操作装置とスレーブロボット装置との間で両装置の状態情報を双方向通信する情報通信手段30とを備える。スレーブロボット装置は、任意の姿勢又は動作を実現するために複数のアクチュエータを備えている。マスタ操作装置10は、スレーブロボット装置が備える構造に対応する構造を備えることでスレーブロボット装置が取り得る任意の姿勢又は動作と同様の姿勢又は動作を実現可能であり、且つ、スレーブロボット装置に設置された複数のアクチュエータに対応した複数のアクチュエータ13a〜13hを備えている。
(もっと読む)
ロボット制御方法及びプログラム
【課題】サービスロボットの利用効率を向上すること。
【解決手段】ロボット制御方法において、ロボットの状態遷移の履歴を保持し、制御装置で発生されたロボットに対する割込要求を受け付け、ロボットが割込要求を割込可能の状態にない場合はロボットの状態遷移の履歴に基づいて割込要求に対して推定される割込処理の待ち時間を算出し、前記制御装置に対して待ち時間を提示するように構成する。前記状態遷移の履歴を保持する工程は、前記ロボットの状態遷移の履歴を状態遷移列の形で保持し、前記ロボットが任意の状態から異なる状態に遷移する状態遷移列の出現回数を求める工程を更に含み、前記待ち時間を算出する工程は、前記状態遷移列とその出現回数に基づいて前記待ち時間を算出する。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
ロボット制御システム
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
給仕サービスのためのロボットシステム
【課題】複数台の移動型ロボットを合理的に運用して省エネルギのもとに質の高い給仕サービスを提供すること。
【解決手段】各移動型ロボット100の状態情報に基づいて移動型ロボット100が調理物引渡場所14に到着できる時刻を予測演算し、予測演算された各移動型ロボット100の到着時刻のうち最も到達時刻が早い一台の移動型ロボット100を選択して当該移動型ロボット100に調理物配達を実行させる処理を行う。
(もっと読む)
ロボット自己位置同定システム
【構成】ロボット自己位置同定システム100は、ネットワーク400を介して接続される追跡サーバ10およびロボット18を含む。追跡サーバ10は空間内の実体(E)を追跡し、ロボット18は状態データを出力する。追跡サーバ10は状態データおよび実体(E)の位置データをバッファに記憶する。また、追跡サーバ10はバッファに記憶された複数の位置データおよび複数の状態データに基づいて、ロボット18と実体(E)とを関連付ける。さらに、追跡サーバ10は、ロボット18に関連付けられた実体(E)を利用して、補正データをロボット18に送信する。そして、ロボット18は、追跡サーバ10が送信した補正データに基づいて自身の位置および角度を補正する。
【効果】ロボット18と追跡サーバ10で追跡される実体(E)とを関連付けることができるため、容易にロボット18を自己位置同定することができる。
(もっと読む)
移動ロボットを遠隔操作するための方法およびシステム
【課題】移動ロボットの遠隔操作の方法および移動ロボットを遠隔操作するための直観的ユーザ・インタフェースを提供する。
【解決手段】ポイント−アンド−クリック装置405を用いることによって、ユーザは、移動ロボットの移動する方向へ、ヘッドアップ・ディスプレイ内に目標位置430を選択することができる。非同期通信を有するシステムにおいてさえもユーザのナビゲーションを支援するために、さらなるグラフィカル・オーバーレイ410、412が提供される。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】好適なロボット装置等を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
ユーザ支援システム
【課題】ユーザによる機器の操作を適切に支援すること。
【解決手段】ユーザ支援システムは、ユーザが操作する機器と、上記ユーザによる上記機器の操作を支援する処理を実行する支援装置と、上記ユーザの位置と姿勢を表すユーザ情報を取得するユーザ情報取得手段と、上記機器の位置と姿勢を表す機器情報を取得する機器情報取得手段と、上記機器の作動状態を表す作動状態情報を取得する作動状態情報取得手段と、を備え、上記支援装置は、支援装置自体の位置と姿勢のうち少なくとも一方が変化するよう可動する可動部を有している。さらに、上記ユーザ支援システムは、上記作動状態情報の履歴の変化に応じて、上記ユーザ情報と上記機器情報に基づいて上記支援装置による上記ユーザに対する支援処理が実行可能となるよう上記可動部の動作を制御すると共に、上記支援装置による支援処理を実行するよう制御する支援装置制御手段を備えた。
(もっと読む)
ロボットシステム
【課題】カメラをハンドに内蔵しながらも、より広範囲にある物品を検出して把持することができるロボットシステムを提供する。
【解決手段】物品を把持するハンドと、ハンドを回転駆動させるアームと、ロボットの動作を制御するコントローラと、ハンドに内蔵され、アームにより回転されるハンドの回転軸に対して撮像方向がオフセットするように配設されたカメラと、カメラにより取得された画像情報を処理してコントローラに信号を送信する画像処理装置と、を有して構成する。
(もっと読む)
傾聴対話持続システム
【課題】コミュニケーション障害のある者同士の対話が持続可能なテレビ電話を提供する。
【解決手段】傾聴対話持続システム100は、モニタ16a、マイク20aおよびモニタカメラ22aが接続されるPC14aと腹部カメラ12aが設けられるロボット10aとを含む。PC14aでは、モニタカメラ22aおよび腹部カメラ12aによって撮影されたユーザAの画像とマイク20aによって集音されたユーザAの音声とに基づいてユーザAの行動が判定され、メモリに記憶される。また、PC14aでは、第1所定時間分の行動データからユーザAの状態を認識する。そして、ユーザの状態が「アクティブ・トーク・モニタ」と認識されていれば、PC14aはロボット10aがユーザAに対して疑似傾聴を行うように、ロボット10aに動作命令を付与する。
(もっと読む)
ヒューマノイドロボットのための診断、予知、及び健全管理システム並びに方法
【課題】超多自由度のヒューマノイドロボットの診断、予知、健全管理に有効な手法を提供すること。
【解決手段】分散コントローラは、多重高速通信ネットワークに渡って、関節及び他の統合システム構成要素を制御する。診断、予知、及び健全管理(DPHM)モジュールは、各種制御レベルでロボット内に組み込まれる。各DPHMモジュールは、ネットワークに渡って、又は外部機器を介してアクセス可能な位置のそれぞれの制御レベル/接続機器に対して、DPHMデータを計測し、制御し、記録する。ロボットを制御する方法は、分散コントローラの多重制御レベル内に、複数のDPHMモジュールを組み込み、DPHMモジュールを使用して、制御レベルの各々内のDPHMデータを計測し、高速通信ネットワークの少なくとも1つに渡ってアクセス可能な位置に、DPHMデータを記録する。
(もっと読む)
ロボット用ドライブレコーダ装置
【課題】 ロボットに係る情報を記録し、事故発生時における事故原因の究明に有効な情報を記録する「ロボット用ドライブレコーダ装置」を提供する。
【解決手段】 ロボット用ドライブレコーダ装置1は、自ロボットの稼動時の周辺環境を撮像するカメラ5、マイクロフォン6、ロボットセンサ4、各データを記録する記録装置9と、自ロボットに接近或いは接触する物体を検出しその検出結果から異常状態にあるか否かを判断するCPU2と、ネットワーク11を介して外部データベース12に通信可能な通信部10とを備え、CPU2が異常状態であると判断したときは、記録装置9に記録された各種データを通信部10によって外部データベース11に送信するものである。
(もっと読む)
ロボット装置
【課題】予め定められた状況以外の状況においてもユーザに対して適切な情報を提供することが可能なロボット装置を提供すること。
【解決手段】ロボット装置100は、状況情報取得部101と自律動作条件判定部102と自律動作部103と通信実行部104とを備える。状況情報取得部101は、周囲の状況を表す状況情報を取得する。自律動作条件判定部102は、状況情報取得部101により取得された状況情報に基づいて所定の自律動作条件が成立しているか否かを判定する。自律動作部103は、自律動作条件判定部102により自律動作条件が成立していると判定された場合、予め定められた動作を行う。通信実行部104は、自律動作条件判定部102により自律動作条件が成立していないと判定された場合、所定の通信先装置との間で通信を行う。
(もっと読む)
コミュニケーションロボット開発支援装置
【解決手段】コミュニケーションロボットの開発を支援するためのものであり、テンプレートDB30には、たとえば行動モジュールがコミュニケーション行動の種類ごとにテンプレート化されて格納されている。テンプレート読み出し手段は、テンプレートDBから所望のテンプレートを読み出し、視覚化して、入力画面500を表示する。たとえば、コミュニケーションロボットの開発者等は、この入力画面500の引数入力領域に行動モジュールの実行に関する実行情報を入力する。行動モジュール作成手段は、テンプレート読み出し手段によって読み出されたテンプレートのデータに、入力画面の引数入力領域に入力された実行情報を取り込むことによって、新規の行動モジュールを作成する。
【効果】簡単に新規のビヘイビアを作成することができる。
(もっと読む)
医療用遠隔操作ロボット・システム
【課題】従来のロボットは、通常、比較的単純な移動プラットフォームを備え、また複数の単語と音声を発するある種の音声合成機能も備える。遠隔患者監視や補助機能を実現するロボット・システムを提供することが望ましい。
【解決手段】ロボットがハウジングに取り付けられているカメラとモニタを備えている。ロボットは、さらに、ハウジングに取り付けられ、コントローラに結合されているプラットフォームもを備える。コントローラは、ブロードバンド・インターフェイスに結合されている。
(もっと読む)
1 - 20 / 181
[ Back to top ]