
Fターム[3C007JT04]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361)
Fターム[3C007JT04]の下位に属するFターム
反力感知機能を有するもの (70)
主部と従部との対応関係を変更できるもの (8)
他に設定機能を有するもの (30)
マニピュレータ自身に装着するもの (67)
マニピュレータ自体を操縦桿とするもの (41)
人の動きをそのまま実現するもの (48)
Fターム[3C007JT04]に分類される特許
1 - 20 / 97
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
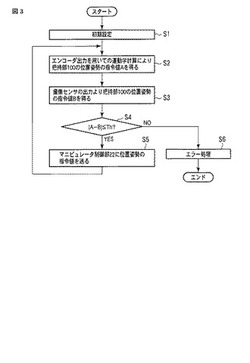
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ

【課題】冗長関節を有するマスタスレーブマニピュレータであっても逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置10の操作部11に、スレーブアーム31の冗長関節の駆動量を操作者が指令するための操作部材としての第1ロール関節102を設ける。スレーブアーム31が冗長関節を有していない場合には、スレーブアーム31の全体としての逆運動学を解くことによって各関節の駆動量を求める。また、スレーブアーム31が冗長関節を有している場合には、先端の冗長関節202がないものとして逆運動学を解くことによって冗長関節202以外の関節の駆動量を求める。冗長関節202についてはマスタ操作入力装置10からの指令値に対応した駆動量とする。
(もっと読む)
マスタ・スレーブ型ロボット操作システム
【課題】安価で操作性に優れたマスタ・スレーブ型ロボット操作システムを提供する。
【解決手段】マスタ・スレーブ型ロボット操作システムは、操作者によって操作されるマスタ操作装置10と、遠隔操作されるスレーブロボット装置と、マスタ操作装置とスレーブロボット装置との間で両装置の状態情報を双方向通信する情報通信手段30とを備える。スレーブロボット装置は、任意の姿勢又は動作を実現するために複数のアクチュエータを備えている。マスタ操作装置10は、スレーブロボット装置が備える構造に対応する構造を備えることでスレーブロボット装置が取り得る任意の姿勢又は動作と同様の姿勢又は動作を実現可能であり、且つ、スレーブロボット装置に設置された複数のアクチュエータに対応した複数のアクチュエータ13a〜13hを備えている。
(もっと読む)
術具及びその術具を有する手術支援システム
【課題】より正確に術具の寿命をコントロール可能な術具及びその術具を有する手術支援システムを提供すること。
【解決手段】術具先端部200の内部に、術具先端部200が位置決めアーム部100に装着されたときに通電されるタイマ201を設ける。このタイマ201は、位置決めアーム部100によって通電されたときに術具先端部200の使用時間又は動作回数をカウントする。タイマ201のカウントの結果、術具先端部200が寿命に達した場合にはロック機構201aが動作して術具の動作がロックされる。
(もっと読む)
マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータにおいて、遠隔操作装置とスレーブアームとの構造が異なる構造であっても、逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】遠隔操作装置100からの操作信号を受けて、マスタ制御部201は、操作部101の姿勢変化に係る等価回転ベクトルVr(t)と直前の操作部101のマスタロール軸Xm(t)とを算出する(ステップS1)。Vr(t)とXm(t)のなす角φが規定値以下の場合には、冗長関節1(Roll2)と、関節1と冗長関係にある関節4(Roll1)のうち、Roll2を駆動関節とし、Roll1を固定関節として(ステップS3)、逆運動学計算を行う。角度φが規定値を以下でない場合には、Roll1を駆動関節とし、Roll2を固定関節として(ステップS4)、逆運動学計算を行う。
(もっと読む)
手術用動力伝達アダプタ及び医療用マニピュレータシステム
【課題】清潔域と不潔域との交錯を防止可能な手術用動力伝達アダプタ、及びそれを備える医療用マニピュレータシステムを提供すること。
【解決手段】術具240とアーム200との間に介在される手術用動力伝達アダプタ220であって、滅菌処理が施される清潔域に接触する第1の部位と滅菌処理が施されない不潔域に接触する第2の部位とを有するロッド222a、222bを備え、ロッド222a、222bが直動運動しても第1の部位が清潔域に位置し、かつ、第2の部位が不潔域に位置するように、ロッド222a、222bの直動運動の範囲が設定されている。
(もっと読む)
マニピュレータシステムの制御装置、マニピュレータシステム、及びマニピュレータシステムの制御方法
【課題】マニピュレータシステム利用上の手間を省き、使い勝手を向上させるマニピュレータシステムの制御装置、該制御装置を具備するマニピュレータシステム、及びマニピュレータシステムの制御方法を提供すること。
【解決手段】マニピュレータシステムに、次のようなスレーブ制御回路400を具備させる。スレーブ制御回路400は、当該マニピュレータシステムの終了時に、その終了態様を示す終了識別情報を生成し、該終了識別情報を記憶し、当該マニピュレータシステムの起動時に、前記終了識別情報を読み出す。
(もっと読む)
ロボットの遠隔操作システム
【課題】連続的に作業指示を行うことができるロボットの遠隔操作システムを提供する。
【解決手段】本発明のロボットの遠隔操作システム1(1000)は、第1の撮像手段110(410)と、作業指示手段120(420)と、ロボット200と、を備える。作業指示手段は、第1の撮像手段の位置情報、作業対象物が含まれるように撮像された画像情報、作業対象物に対して実行させる作業指示情報をロボットに送信する。ロボットは、作業指示手段から受信した第1の撮像手段の位置情報に基づいて移動し、周辺情報取得手段250、260でロボットの周辺の情報を取得し、取得した周辺情報と作業指示手段から受信した画像情報との照合結果から作業対象物の位置情報を取得し、取得した位置情報に基づいて作業対象物に近づき、作業指示手段から受信した作業指示情報に基づく作業を作業対象物に対して実行する。
(もっと読む)
遠隔操作装置
【課題】操作者が、マニピュレータの出力動作を容易に連想及び体感しながら入力動作を行うことができる遠隔操作装置を提供すること。
【解決手段】重力方向に対する姿勢及び回動動作が入力される第一入力部10と、第一入力部10に対して回転可能に接続されて、重力方向に対する姿勢及び第一入力部10に対する回転動作が入力される第二入力部11と、第一入力部10又は第二入力部11に対して移動可能に接続されて、第一入力部10又は第二入力部11に対する移動動作が入力される第三入力部12と、入力動作を第一入力部10又は第二入力部11の何れか一方に規制する入力切換スイッチ(入力切換部)13と、加速度センサ(加速度検出部)15と、入力動作を腕部に対する手先部の回動方向及び回動角度に変換し、入力動作を手先部の移動方向及び移動距離に変換し、並びに、入力動作を把持部の開閉量に変換する制御部17と、を備えている。
(もっと読む)
作業用装置
【課題】可動部位を含む作業機において、実際に作業機を動かす前に作業機のどの部位が作動するか、または、どのように作動するかを瞬時に把握した後、同一の操作で速やかに作業機を作動させ、操作性を向上することができる作業用装置を提供する。
【解決手段】操作手段の所定量未満の第1の操作量の操作を行うと、アクチュエータの駆動によって作動する部材に対応付けられた部位を、実際に作動する部材を作動させるときと同一の操作を行うことによって、いずれの部材が作動するか、または、どのように作動するのかを画像表示部220に識別表示し、操作手段の所定量以上の第2の操作量の操作で、前記識別表示した部位に対応する部材を作動させる。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】好適なロボット装置等を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
作業機械の操作支援装置
【課題】アクチュエータの駆動によって直接的に作動している部位をオペレータが確実に把握できるようにすることで、誤操作を生じにくくする作業機械の操作支援装置を提供する。
【解決手段】動作させる部材に対応付けられた部材の画像143´を、実際の部材の相対位置関係に近似させて画像表示させるための画像表示部220を備え、部材のうちアクチュエータの駆動によって直接的に作動している部材を特定するとともに、特定された部材に対応する部材の画像143´を、他の部位の画像130´,141´,142´,150´と識別可能に画像表示部220に表示させるようにした。
(もっと読む)
生活支援ロボットアームの操作トレーニング装置
【課題】実際の生活支援ロボットアームを使用せずに、生活支援ロボットアームの機能を模擬したシミュレータを用いることで、ノートPC一台で操作トレーニングを行うことができる生活支援ロボットアームの操作トレーニング装置を提供する。
【解決手段】計算機内に構築された仮想作業環境を計算機のディスプレイに表示するとともに、操作ユーザインタフェースからの入力により、仮想作業環境内に配置された生活支援ロボットアームシミュレータで仮想作業ツールを操作して生活支援ロボットアームの操作トレーニングを行うための装置であって、仮想作業ツールは、仮想ブロックと仮想ボードを用い、操作トレーニング用プログラムにより、難易度の異なった複数の作業課題について、操作目標の仮想ブロックを生活支援ロボットアームシミュレータで把持して、仮想ボード上の目標位置に挿入または配置する操作トレーニングを行わせる。
(もっと読む)
医療用ロボットシステム
【課題】本発明は、支持する器官の形状の個人差等に対応することができ、しかも部品点数の増加を抑えることができる医療用マニピュレータを備えた医療用ロボットシステムを提供する。
【解決手段】ロボットアーム24と、ロボットアーム24に着脱自在に設けられ、子宮Aを所定の位置に支持するための子宮マニピュレータ34と、ロボットアーム24及び子宮マニピュレータ34を操作するコンソール26と、を備えた医療用ロボットシステム10であって、子宮マニピュレータ34は、基部58に設けられた第1アーム部60と、第1アーム部60よりも先端側に位置して子宮Aを保持する第2アーム部64と、第1アーム部60と第2アーム部64とを連結し、かつ第1アーム部60に対する第2アーム部64の向きを可変可能な連結部68とを備え、第2アーム部64は、長手方向に伸縮可能に形成されている。
(もっと読む)
遠隔操作システム及び遠隔操作方法
【課題】容易にロボット装置を最適な移動目標位置へ移動させ、操作内容を実行させることができる遠隔操作システム及び遠隔操作方法を提供すること。
【解決手段】ロボット装置を遠隔操作するための遠隔操作システムは、ロボット装置周辺を撮影する撮影手段と、撮影手段により撮影された撮影画像を表示する表示手段と、表示手段に表示された撮影画像上において、目標対象物に対する指示を入力する入力手段と、入力手段により入力された撮影画像上における目標対象物の指示方法に基づいて、ロボット装置を移動させる移動目標位置と、移動目標位置における前記ロボット装置の操作内容と、を推測する推測手段と、推測手段により推測された移動目標位置へロボット装置を移動させると共に、操作内容を実行させるための指令値を生成する指令値生成手段と、を備えている。
(もっと読む)
制御システム、制御方法、操作制御装置及び作業装置
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
福祉用ロボット装置のロボットアーム操作方法、ロボットアーム操作プログラム、及び、記録媒体
【課題】物体の把持や器具・装置等の操作が容易に行うことができる福祉用ロボットアームのロボットアーム操作技術を提供する。
【解決手段】本発明によれば、ユーザの手動によってロボットアームを動かして、当該ロボットアームに搭載されたカメラを、当該ロボットアームの動作に関する情報が含まれた画像マークの近傍に配置し(手動モード)、当該カメラにて撮像された画像に画像マークの像が含まれているとき、当該画像マークの像を参照して当該画像マークにより表現された上記情報を読み出し(情報読出工程)、得られた上記情報に基づいて、ロボットアームの動作を自動制御する(ロボットアーム制御工程)とを含んでいる。
(もっと読む)
医療用器具の製造方法及び医療用器具
【課題】医療用器具の先端部の鋏を、対象物を切断し易いように高精度に組み立てる。
【解決手段】鋏機構1300をユニットとして組み立てる。鋏機構1300は、重ねた一対のエンドエフェクタ部材1308を基端の軸部で所定の擦り合わせ状態でボルト体1217ト及びナット1219により開閉可能に締結する。ボルト体1217は軸線方向に貫通形成された中心孔1217dを有する。連結シャフト18先端に連結されるカバー1160の筒内に鋏機構1300を挿入すると共に、受動板1158に対してリンク1220a、1220bによりエンドエフェクタ部材1308を接続する。鋏機構1300とカバー1160の内面との間に形成される隙間にスペーサ1340を配置する。カバー1160の孔1307とボルト体1217の中心孔1217dとに対し、カバー1160の外面側からピン1196を嵌挿する。
(もっと読む)
遠隔操作装置
【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
屈曲機構とその制御装置および制御方法
【課題】狭隘部や複雑形状部において、重量のある作業装置を任意の位置および姿勢へ移動するための屈曲機構を提供する。
【解決手段】本発明の屈曲機構は、2つの剛体と該剛体間を接続する駆動部と、該駆動部を制御する制御装置を備え、該制御装置は、動作時に該剛体の相互の位置関係を固定し保持する動作時固定手段と、非動作時に該剛体の相互の位置関係を固定しない非動作時開放手段を有することを特徴とする。また、球体の回転静止時に、電磁石を磁化することで球体との間に引力を発生し、互いに接着することで、保持トルクを増加させる。
(もっと読む)
1 - 20 / 97
[ Back to top ]