
Fターム[3C007JU11]の内容
マニピュレータ、ロボット (46,145) | 教示装置、操作盤 (625) | 操作盤のタイプ (328)
Fターム[3C007JU11]の下位に属するFターム
直接見えない場所からの遠隔操作 (87)
複数箇所で操作できるもの (11)
可搬型操作盤 (151)
固定型操作盤 (22)
マニピュレータ自身に設けられた操作装置 (35)
教示装置と操作装置とを併用するもの (15)
Fターム[3C007JU11]に分類される特許
1 - 7 / 7
教育教材用ロボット
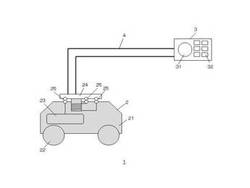
【課題】逐次制御から自動制御に切り替わる際のロボットの動作自由度を確保できる教育教材用ロボットを提供する。
【解決手段】本発明の教育教材用ロボットは、電気的な制御信号による逐次制御および実行オブジェクトであるプログラムによる自動制御の少なくとも一方に基づいて動作するロボットと、ロボットに制御信号を与える制御装置と、制御装置とロボットとを接続すると共に制御信号を電気的にやり取りする制御ケーブルと、を備え、制御装置は、逐次制御から自動制御に切り替える切り替え信号を、ロボットに出力可能であり、制御ケーブルは、切り替え信号に基づいて、ロボットに対する拘束力を弱める。
(もっと読む)
ロボットコントローラのフィルタ

【課題】設置形態がどの向きに変更されてもロボットコントローラの内部にオイルが流入することがないようにする。
【解決手段】フィルタ4のフィルタ外板5には、複数の第1の通気孔7、第1の筒部8、第1の鍔部9が形成され、フィルタ内板6には、第1の通気孔7に対して、フィルタ外板5とフィルタ内板6との対向方向で重ならない位置に、複数の第2の通気孔10、第2の筒部11、第2の鍔部12が形成されている。さらに、第1の筒部8の長さと第2の筒部11の長さとを足した長さは、前記フィルタ外板5とフィルタ内板6との対向距離よりも長く、第1の鍔部9と第2の鍔部12とは、フィルタ外板5とフィルタ内板6との対向方向から見て重ならない形態に形成されている。
(もっと読む)
産業用機械
【課題】簡単な構成で確実にねじの締結による筐体の閉塞状態を確保し、蓋を開けた状態では安全性を確保できる構成とする。
【解決手段】ロボットのコントローラ3は、筐体本体を閉塞する蓋を4個の取り付け用ねじ14a〜14dでとりつける。筐体本体の開口面の対角位置の取り付け用ねじ14a、14cに対応して筐体内部にレバー型スイッチ15が設けられる。蓋を取り付け用ねじ14a、14cにより固定するとレバー型スイッチ15がオン状態に移行する。高電圧が印加されるモータ駆動回路26a、26bへの給電経路には、リレースイッチ回路23が設けられる。給電許可回路24は、リレーコイル23c、レバー型スイッチ15、15を介してグランドに接続され、取り付け用ねじ14aおよび14cの締め付け状態でリレースイッチ回路23がオン状態となり、安全性の確保を図れる。
(もっと読む)
力表示方法及び力表示装置
【課題】ロボットに適切な教示を行うことで教示後の実際のロボットの作業中にハンドリング対象となる部品を破損させることのない力表示方法及び力表示装置を提供する。
【解決手段】被操作対象を特定方向の操作量だけ操作し、この操作に伴って被操作対象の受ける反力を操作者にフィードバックさせる教示装置における力表示方法であって、被操作対象の移動方向を規定する各軸に発生する反力を各軸ごとに計測する第1のステップと、各軸に発生して計測した反力の、予め設定された最大許容力に対する割合値を各軸ごとに計算する第2のステップと、計算した割合値をこれに対応する大小関係を表す記号に変換する第3のステップと、変換した記号を表示する第4のステップと、を有している。
(もっと読む)
作動装置
【課題】操作者による手動操作や音声操作を用いることなく指令情報を入力することができ、操作者の意図する通りに作動させることができる作動装置を提供する。
【解決手段】ロボット10は、ロボット10の前方の床面の所定の位置において物体を検出するレンジセンサ17と、同床面上にロボット10が実行する作動の内容を表した作動メニューMを表示するプロジェクタ20と、これらレンジセンサ17およびプロジェクタ20の各作動を制御するとともに所定の作動内容を実行するコントローラ30とを備えている。レンジセンサ17は、作動メニューMの前面を含むようにレーザ光を走査して測長信号をコントローラ30に出力する。コントローラ30は、測長信号が表す作動メニューM上における物体の位置を用いて、同位置に対応する作動内容を実行する。
(もっと読む)
2足移動体の歩行ステップをテンキーによって制御する装置
【課題】 2足移動体のステップをテンキー入力し、それに対応したステップ結果を確認できる装置を提供する。
【解決手段】 構成要素はコンピュータのハードウェアとソフトウェアである。ソフトウェアは、テンキー入力順とステップを対応させるデータとテンキー入力受付機能、ステップ判定機能、ステップ結果出力機能のプログラムで構成する。2足移動体のステップにテンキーを順に押すことを割り当て、テンキー位置によって足の左右(回転時は両足)、歩幅、踏み出し方向、足の向き(回転時)を判定する。ステップ結果を足跡や床面パターン移動、または2足移動体を模した画像や視界変化の出力で行う。
(もっと読む)
自律型ロボットとの相互作用の装置と方法
【課題】自律型ロボットとの相互作用の装置と方法の提供。
【解決手段】新たな装置および関連した方法は、刺激反応型自律型ロボットとの使用を対象とする。当該装置は、各々にエンコードされた指示を含む図形画像の電気的保存記憶部、およびエンコードされた指示の自律型ロボットへの提示装置という両方の機能を有する。当該装置は下記の主要部分を含む、ユーザーへの表示および自律型ロボットへのエンコードされた指示提示の双方に使用される出力方法、ユーザーによる種々のタップ選択操作が可能な入力方法、図形画像保存のための不揮発性情報記憶部、図形画像をツリー構造または階層構造的に整理し効果的に検索、取り出しを行う整理方法。
(もっと読む)
1 - 7 / 7
[ Back to top ]