
Fターム[3C007KS10]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業環境(例;雰囲気温度) (665)
Fターム[3C007KS10]の下位に属するFターム
作業者の位置、状態 (250)
障害物の位置、状態 (207)
他のロボット、機械の位置、状態 (76)
Fターム[3C007KS10]に分類される特許
1 - 20 / 132
ロボットの軌道計画システム及び軌道計画方法
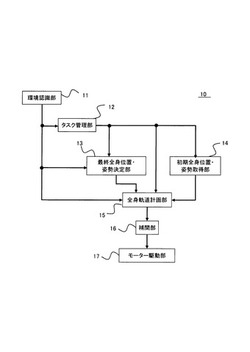
【課題】少ないノードで軌道計画の成功率を向上させることができる、ロボットの軌道計画システムを提供する。
【解決手段】本発明の一形態に係るロボットの軌道計画システム10は、グラフ構造データ格納手段に格納されているグラフ構造に対して、スタートノード及びゴールノードを追加し、さらに最終姿勢のハンドの周辺空間にノードを追加して、追加したノードと、隣接するノードとをエッジで接続し、スタートノードからゴールノードまでを結ぶ経路を探索するグラフ構造探索処理手段と、グラフ構造探索処理手段により探索された経路に含まれるノードが示す姿勢が、環境情報と干渉するか否かを判定し、干渉していると判定した場合には、ノードをグラフ構造から除外するノード有効性判定手段と、を備える。
(もっと読む)
ロボット監視システム、及びロボット監視システムの異常判定方法

【課題】ロボットの移動先の異物等をリアルタイムで監視することのできるロボット監視システム、及びロボット監視システムの異常判定方法を提供する。
【解決手段】ロボットコントローラ30は、予め正常状態でアーム21を動作させた際に、カメラユニット40により取得された撮像画像と、算出された撮像時のアーム21の姿勢とを対応付けてデータ記憶部31に保存しておく。シミュレータ50は、アーム21が動作する際の各姿勢について、その姿勢から所定周期経過するまでにアーム21が動作する動作範囲を算出する。ロボットコントローラ30は、アーム21の動作を制御する際に、算出されるアーム21の姿勢に対応する正常状態の撮像画像をデータ憶部31から読み込み、カメラユニット40により取得される撮像画像と正常状態の撮像画像とにおいて、動作範囲に対応する部分を比較して異常の有無を判定する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】状況に応じて、3次元計測のためのパターン光の点灯及び非点灯を適切に切り替えることが可能なロボット装置及びロボット装置の制御方法を提供する。
【解決手段】外部の環境にパターン光を照射する照射部と、外部の環境を撮像して画像を取得する撮像部と、外部の環境を認識する外部環境認識部と、画像の取得状態に基づいて、パターン光の照射が必要であると判断したとき照射部を点灯に制御する照射判断部と、外部の環境に基づいて、パターン光の照射が不要である又はパターン光の照射を強制停止すべきであると判断したとき照射部を非点灯に制御する消灯判断部とを備える。
(もっと読む)
ロボット装置、ロボット装置の遠隔制御方法及びプログラム
【課題】遠隔操作が必要な自律ロボット装置に対して、ユーザーが容易に遠隔操作することが可能なロボット装置、ロボット装置の遠隔制御方法及びプログラムを提供する。
【解決手段】自装置又は外部環境の現在状況を把握し、現在状況に基づいて将来の行動計画を複数の行動計画候補のうちから一つの行動計画に決定する行動計画部と、決定された行動計画に基づいて、自装置を遠隔制御する遠隔制御装置に表示する表示内容を、予め用意しておいた複数の表示パターン候補のうち一つの表示パターンに決定し、決定された表示パターンを遠隔制御装置に表示させる表示制御部とを備える。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】ユーザとのインタラクションを介してロボットの周辺情報を更新し、ロボットへの指示を簡便化する。
【解決手段】制御装置100は、移動体に所定の処理を実行させる実行部108と、前記移動体が移動可能な領域の環境地図を記憶している記憶部104と、前記移動体の周辺情報を検出する検出部102と、前記検出部により検出された前記移動体の周辺情報に基づいて、前記環境地図を更新する更新部106と、ユーザ入力に応じて、ユーザの指示を示す指示情報を取得する取得部110と、を備え、前記実行部108は、前記環境地図を参照して、前記移動体に前記指示情報に基づく処理を実行させ、前記更新部106は、前記指示情報および前記指示情報に基づく前記移動体により実行される処理をもとに前記環境地図を更新する。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム
【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
移動ロボットを遠隔操作するための方法およびシステム
【課題】移動ロボットの遠隔操作の方法および移動ロボットを遠隔操作するための直観的ユーザ・インタフェースを提供する。
【解決手段】ポイント−アンド−クリック装置405を用いることによって、ユーザは、移動ロボットの移動する方向へ、ヘッドアップ・ディスプレイ内に目標位置430を選択することができる。非同期通信を有するシステムにおいてさえもユーザのナビゲーションを支援するために、さらなるグラフィカル・オーバーレイ410、412が提供される。
(もっと読む)
ロボット装置、その制御方法、及びプログラム
【課題】省電力化を実現したロボット装置、その制御方法、及びプログラムを提供すること。
【解決手段】ロボット装置10は、車輪を用いて走行する。また、ロボット装置10は、走行路面の状態を検出する状態検出手段と、車輪を回転可能に支持し、車輪からの衝撃を吸収するサスペンション手段と、サスペンション手段に対して駆動力を供給する駆動手段と、サスペンション手段の動作をロック及び解除するロック手段と、状態検出手段により検出された走行路面の状態に応じて、ロック手段のロック及び解除と、駆動手段の駆動及び停止と、を制御する制御手段と、を備えている。
(もっと読む)
問題解決システム、問題解決支援装置及び問題解決方法
【課題】知能発達システムに要求される性質を満たす実世界における一般問題解決システムを提供する。
【解決手段】 ロボットと問題解決支援手段とプランナとを備える。問題解決支援手段は、入力層とパターン記憶層とシンボル記憶層とを有し、記号接地フェーズでは、パターン情報の種類に応じた自己増殖型のニューラルネットワークを用いて概念情報が対応付けられたパターン情報を学習し、知識獲得フェーズでは、ロボット自身の行動の前後の実環境でそれぞれ取得したパターン情報から変化前後の環境モデルをそれぞれ取得して、前提条件と削除リストと追加リストとロボットの動作情報とを含むオペレータを生成し、問題解決フェーズでは、タスクの初期状態及び目標状態をプランナに入力してプランニングをし、プランナが出力するプラン中の動作情報に応じた動作をロボットに実行させる。
(もっと読む)
情報処理装置および情報処理方法
【課題】過去の映像を用いてユーザ操作を支援するための補助的情報を提示する。
【解決手段】情報処理装置100は、任意の位置および向きを示すポインタを含む所定空間内の大域映像を取得する大域映像取得部104と、前記大域映像から前記所定空間内の位置情報を取得する位置情報取得部108と、前記所定空間内で撮像された映像データと、前記映像データの撮像された位置および向きの情報を含む映像情報とを関連付けて記憶している記憶部と、前記ポインタの示す位置および向きに対応する前記映像データを、前記大域映像に重畳して表示画面に表示する映像表示部101と、を備える。
(もっと読む)
天井内モニタリングロボットシステム
【課題】天井内のモニタリングを行う際に、ロボットが転倒することなくモニタリングを続行することができ、天井内の観察とロボットの捕捉を容易にすることが可能なロボットシステムを提供する。
【解決手段】天井内を走行可能な自走式ロボットが、走行制御機構と、可動式のカメラと、姿勢センサとを有する。天井点検口の付近に可動式の補助カメラを設置し、ロボットと補助カメラとの間で無線通信可能なコンピュータを備える。コンピュータがロボットと補助カメラからのデータを受信し、ロボットの走行制御機構に信号を送信して所定の向きと方向へと移動させる。姿勢センサが検出した傾斜角が第1の設定値に達するとコンピュータから走行制御機構に減速信号が送信され、第2の設定値に達すると停止信号が送信される。コンピュータのモニター画面にカメラが撮影した画像と補助カメラが撮影した画像とが概ね同時に表示される。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの移動経路周辺に存在する所定種類の段差部を適切に回避し得る目標運動を生成しつつ、ロボットの動作制御を行う。
【解決手段】目標運動決定手段100は、ロボット1の移動環境の床形状情報とロボット1の移動経路に関する要求とに基づき、ロボット1の脚体2の先端部の運動の軌道を規定する脚体運動パラメータを決定しつつ、ロボット1の目標運動を逐次決定する。目標運動決定手段100に床形状情報を出力する床形状情報出力手段114は、所定種類の段差部DFの起立面を実際の起立面よりも緩斜面に整形してなる床形状情報を出力する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】動作制御部と動作指示部の電源が遮断された場合においても正常にロボットの動作停止を行え、また、正常に動作制御部と動作指示部を正常に終了するロボット制御装置およびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御装置1は、動作制御部2と動作指示部3と電源部5を備え、ロボット4が接続されている。動作制御部2は通信部201とプログラム記憶部203とプログラム実行部204とロボット制御部205と電源遮断検出部206とシャットダウン実行部207を備え、動作指示部3は通信部301と電源遮断信号抽出部302とデータ読出・書込部303とデータ記憶部304とシャットダウン信号生成部305とシャットダウン実行部306と電源制御信号生成部307を備え、電源部5は電力変換部501とUPS502と電源制御部503とスイッチ504を備えている。
(もっと読む)
妨害電磁波制御方法、妨害電磁波制御プログラム及びロボット
【課題】電磁波放出レベルを抑制する。
【解決手段】規制レベル検出手段12は、対象装置の現在位置を取得し、地図情報に基づいて現在位置を含む対象領域の電磁波規制レベルを検出する。動作状態選択手段13は、形状別電磁波レベル情報及び部位別電磁波レベル情報に登録されている動作状態から検出した電磁波規制レベルに適合する電磁波放出レベルに対応する動作状態を選択する。そして、駆動制御手段14は、選択した動作状態に応じて複数の部位を駆動する駆動指示を出す。
(もっと読む)
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
ロボットの対象物認識方法
【課題】領域内に存在する対象物をセンサからの検知情報に基づいて、コンピュータに大きな負担を掛けることなく人間などの対象物を頑健に認識することができる。
【解決手段】ロボット10の周囲に存在する人間は、超音波センサ22,全方位カメラ30,眼カメラ52R,52L,焦電センサ82などの複数のセンサによって検知される。各センサから出力されたセンサデータは、センサ入力/出力ボードを介してメモリに取り込まれる。CPUは、取り込まれたセンサデータのうち複数のサンプリング領域に対応する一部のセンサデータに基づいて、人間の存在確信度の正規分布を仮定する。CPUはまた、仮定された正規分布に基づいて人間の存在位置を認識し、存在確信度が増大するほど領域サイズが拡大するように複数のサンプリング領域を規定する。
(もっと読む)
ロボット用ドライブレコーダ装置
【課題】 ロボットに係る情報を記録し、事故発生時における事故原因の究明に有効な情報を記録する「ロボット用ドライブレコーダ装置」を提供する。
【解決手段】 ロボット用ドライブレコーダ装置1は、自ロボットの稼動時の周辺環境を撮像するカメラ5、マイクロフォン6、ロボットセンサ4、各データを記録する記録装置9と、自ロボットに接近或いは接触する物体を検出しその検出結果から異常状態にあるか否かを判断するCPU2と、ネットワーク11を介して外部データベース12に通信可能な通信部10とを備え、CPU2が異常状態であると判断したときは、記録装置9に記録された各種データを通信部10によって外部データベース11に送信するものである。
(もっと読む)
1 - 20 / 132
[ Back to top ]