
Fターム[3C007KS22]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | マニピュレータの状態 (1,659) | 速度 (249)
Fターム[3C007KS22]の下位に属するFターム
Fターム[3C007KS22]に分類される特許
1 - 20 / 51
ロボット制御装置、ロボットシステム、及びロボット制御方法
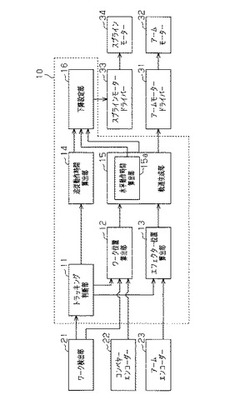
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
干渉チェック方法及びロボット制御装置

【課題】ロボットアームと部品給材装置との干渉の有無を確実に発見する手段を提供する。
【解決手段】1方向に動作するロボットアーム100の移動方向と速さとを定めたベクトルデータであるロボットアーム並進速度データと、1方向に動作するワーク搬送装置の移動方向と速さとを定めるベクトルデータである部品給材装置200の並進速度データとから計算される相対速度データに基づく拡大処理から得られる拡大済み干渉ボリュームデータを生成する。拡大済み干渉ボリュームデータと、ロボットアーム100の形状データあるいは部品給材装置200の形状データとを、ロボットアームの位置姿勢データ及び部品給材装置200の位置姿勢データに従って、ロボットアーム100と部品給材装置が干渉の有無を確認する交差判定計算を行い、干渉の有無を判断する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】 ブレーカの容量を低減させつつ、ロボットの遮断動作の頻度を低減させることができ、しかも異常原因の検証を容易に行うことができるロボット制御装置を提供する。
【解決手段】 複数のモータ2jの速度をそれぞれ検出する速度検出器10jと、複数のモータ2jに流れる電流をそれぞれ検出する電流検出器9jと、モータ2jの速度ωjおよびモータ2jに流れる電流Ijからロボットの推定消費電力Pを算出する演算器81と、推定消費電力Pがブレーカ4の電流許容値を基準として異常であるか否かを判定する判定器82と、当該判定において推定消費電力Pが異常であると判定された場合に、ロボットをブレーカ4のトリップを回避するよう制御するための制御器83とを備えている。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
ロボットの制御装置
【課題】ロボットをより高速で動作させるための制御パターンを取得する制御装置において、その実用性を向上させる。
【解決手段】制御装置20は、ロボットのアームを第1姿勢と第2姿勢との間で駆動して、各サーボモータ31において速度、加速度、及び供給される電流の各連続値を検出する。各モータ31において所定の期間毎に、上限値に対する電流値の比率である電流比を算出する。所定の期間毎に、各モータ31の電流比のうち最大電流比を選択し、この最大電流比の逆数に基づいて各モータ31の修正加速度を算出する。修正加速度と各モータ31の速度とに基づいて、各モータ31における修正速度を繰り返し算出する。修正速度と各モータ31の回転位置とに基づいて、各モータ31における修正回転位置を繰り返し算出する。第1姿勢側から算出された修正速度と、第2姿勢側から算出された修正速度とに基づいて、修正後の速度変動パターンを設定する。
(もっと読む)
2足歩行ロボット及びその制御方法
【課題】外乱の作用時に、ハードウェアや環境の制約に則った適切な遊脚の着地位置を設定する。
【解決手段】外乱作用時の遊脚の着地位置の決定に際して、電子制御ユニット1は、ハードウェアの制約により決定される遊脚の着地可能域を第1の着地可能域として算出するとともに、環境の制約により決定される遊脚の着地可能域を第2の着地可能域として算出する。そして電子制御ユニット1は、第1及び第2の着地可能域のAND領域を抽出し、その抽出したAND領域を、外乱が作用したときの遊脚の着地可能域として演算する。
(もっと読む)
ロボット用事故解析システム
【課題】ロボットに発生した事故状態を客観的にとらえることができるロボット用事故解析システムを提供する。
【解決手段】ロボット2に発生した事故状態を再現するロボット用事故解析システムであって、ロボット2に設けられ、自ロボットの稼動状態情報を認識する稼動情報認識部と、ロボットとは別に設けられた撮像手段6によって撮像されたロボット2とその周辺環境との画像データを環境情報として認識する環境情報認識部とを有し、前記稼動状態情報と前記環境情報とを記録するロボット用レコーダ装置3と、ロボット用レコーダ装置3に記録された稼動状態情報及び環境情報に基づいて事故状態を再現するロボット用シミュレータ装置4とを備える。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
カメラ付きロボット
【課題】 ロボットアームに搭載されるカメラのシャッターチャンスを最適化し、組立作業効率を向上させる。
【解決手段】 フィンガー4上の点Fと、カメラ1の位置基準であるアライメントマーク3aに対する位置をカメラ1によって撮像し、画像処理によってカメラ1の位置を計測する。カメラ1の位置が予め設定された位置閾値以下で、かつ、カメラ1に搭載された速度センサ3によって計測されるカメラ1の移動速度が予め設定された速度閾値以下である時にカメラ1のシャッターを切る。あるいは更に、速度センサ3の微分値によって計測されるカメラ1の移動加速度が予め設定された加速度閾値以下である時と論理積を取ってシャッター切る。これによって、ワーク12を探索するための画像のブレを防ぎ、位置誤差を低減するとともに、シャッターを早く切ることで作業効率を向上させる。
(もっと読む)
ロボット用ドライブレコーダ装置
【課題】 ロボットに係る情報を記録し、事故発生時における事故原因の究明に有効な情報を記録する「ロボット用ドライブレコーダ装置」を提供する。
【解決手段】 ロボット用ドライブレコーダ装置1は、自ロボットの稼動時の周辺環境を撮像するカメラ5、マイクロフォン6、ロボットセンサ4、各データを記録する記録装置9と、自ロボットに接近或いは接触する物体を検出しその検出結果から異常状態にあるか否かを判断するCPU2と、ネットワーク11を介して外部データベース12に通信可能な通信部10とを備え、CPU2が異常状態であると判断したときは、記録装置9に記録された各種データを通信部10によって外部データベース11に送信するものである。
(もっと読む)
多軸ロボット及びその速度制御装置
【課題】多軸ロボットの表面部位の移動速度を適正に規制しつつもその移動速度をなるべく高くする。
【解決手段】基台2に連設された複数の連結部材3〜8の先端にツール部材9を取り付けてなり、基台2及び複数の連結部材3〜8が互いに相対回転可能な多軸ロボット1であって、ツール部材9の移動時に各回転軸A1〜A6の角速度を制御する速度制御装置を備え、速度制御装置が、複数の連結部材3〜8及びツール部材9において予め設定された複数の表面部位の最高移動速度が所定の制限移動速度となるように当該回転軸の角速度を求める制御を実行する構成となっている。
(もっと読む)
産業用ロボットの安全制御装置
【課題】
産業用ロボットと作業者とが協調して協同作業を行うに際して、ロボットの不要な停止を避けながらも、ロボットと作業者とが接触しないようにする。
【解決手段】
本発明に係る安全制御装置18は、予め教示された作業プログラムに従って作業者4と協同して作業を行う人間協同型産業用ロボット3の安全制御装置18である。そして、作業者4及びロボット3それぞれの現在位置及び移動速度を取得し、作業者4の現在位置及び移動速度に基づいて作業者4の将来位置を予測した作業者基準位置を算出するとともに、ロボット3の現在位置及び移動速度に基づいてロボット3の将来位置を予測したロボット基準位置を算出し、作業者基準位置及びロボット基準位置に基づいてロボット3と作業者4との接触可能性を判断し、接触可能性の判断結果に応じた処理を行う。
(もっと読む)
マニピュレータの制御装置および制御方法
【課題】ハンドを先端に装着したアームの動作状態に応じて多指ハンドの指ごとに位置制御と力制御とを切り替え、物体の把持や搬送に適した多指ハンドの制御を行うことができる制御方法および装置を提供する。
【解決手段】先端部に各々力センサ18を設けた複数の指を備えた多指ハンドと、多指ハンドを先端に装着したアームとからなるマニピュレータの制御装置において、アーム制御部1は、多指ハンド制御部2に対しアームの動作状態としてアームの先端部の加速度、速度または移動距離の少なくとも1つと、アームの先端部の位置姿勢を出力し、多指ハンド制御部2は、指ごとに位置制御または力センサの出力に応じた力制御を行う指制御部51、52、53と、アームの動作状態に応じて指制御部51、52、53に対し力制御と位置制御の間で切り替えを指令する制御モード選択部4を備える。
(もっと読む)
干渉チェック制御装置および干渉チェック制御方法
【課題】複数のロボットの作業効率を改善する。
【解決手段】動作領域に重複部分を有するロボット同士の干渉を回避する干渉チェック制御装置であって、速度・位置記憶手段111と、速度・位置データに基づいてロボット構成部分同士の距離を計算するロボット間距離計算手段112と、速度・位置データに基づいてロボット構成部分同士の干渉判定領域を求める干渉判定用領域計算手段113と、干渉判定領域で規定される干渉判定距離とロボット構成部分同士の距離とを比較し干渉の有無を判定する干渉判定手段114とを備え、干渉判定用領域計算手段113は、干渉判定領域を速度データに基づいて移動速度と移動方向に応じて指向性を持って拡張し、拡張された干渉判定領域を決定し、干渉判定手段114は、拡張された干渉判定領域で規定される干渉判定距離とロボット構成部分同士の距離とを比較し干渉の有無を判定する。
(もっと読む)
干渉チェック制御装置および干渉チェック制御方法
【課題】制動動作中におけるロボットの構成部分同士の干渉の有無を高精度に判定する。
【解決手段】動作領域に重複部分を有するロボット同士の干渉チェック制御装置であって、速度・位置記憶手段910と、干渉判定領域の閾値をあらかじめ記憶する干渉判定用閾値記憶手段918と、速度・位置データに基づいて制動開始から停止までに必要な時間を計算する制動時間計算手段911と、制動開始から制動完了までの各構成部分間の最近接距離の履歴を、接近する各構成部分の速度に基づいて推定するロボット間距離推定手段916と、各構成部分間の最近接距離の履歴と干渉判定領域の閾値とを比較し、制動期間中の干渉の有無を判定する干渉判定手段917と、干渉判定結果に応じて各ロボットに対する移動指令値を作り出すとともに、ロボットの速度・位置データを速度・位置記憶手段に記憶させる指令値生成手段919とを備える。
(もっと読む)
産業用ロボット
【課題】大きな搬送対象物や高価な搬送対象物の搬送に適した産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、上下駆動機構を停止させるための2個のブレーキ機構24を備え、制御部80は、2個のブレーキ機構24を制御するブレーキ制御部84を備えている。ブレーキ制御部84は、2個のブレーキ機構24を段階的に作動させる。
(もっと読む)
マニピュレータの姿勢制御装置および姿勢制御方法
【課題】人物などの障害物との衝突が回避できずに衝突した場合であっても、障害物に対する衝突力を低減させることを可能とするマニピュレータの姿勢制御装置を提供する。
【解決手段】マニピュレータ1は、本体部2に回動可能に設けたアーム部3を有している。姿勢制御部10は、マニピュレータ1の本体部2を移動させるときに進行方向Pに対して斜め後方にアーム部3を傾けるように制御する。これにより、アーム部3が傾いた状態で障害物11に衝突するため、障害物11に対して衝突力を分散させることができる。障害物11が人物であれば、正面衝突時に比べて人物に与える衝突力を緩和し痛みを抑えることができる。よって、マニピュレータ1の安全性を高めることができる。
(もっと読む)
脚式歩行ロボットの安定化制御装置
【課題】 前後方向と左右方向の安定化制御が互いに影響し合うことなく,足裏の小さいロボットでも前後左右からの外乱に対して高い安定性で動作することができる脚式歩行ロボットの安定化制御器を提供する
【解決手段】 上体傾斜角,上体傾斜角速度,重心位置補正量,重心速度補正量の4つを状態変数とし,重心加速度補正量を操作量とした状態方程式でロボットをモデル化する。前後方向,左右方向それぞれについて,この状態方程式を用いてレギュレータを構成し,計8つの状態変数全てを0に収束させる。
(もっと読む)
アクチュエータおよびロボット
【課題】外力に応じたリンクの動きのコンプライアンス性を、環境や用途に鑑みて適切に調節することができるアクチュエータ等を提供する。
【解決手段】本発明のアクチュエータ2によれば、目標リンク角速度ω1と目標従動角速度ω2との合成結果としての目標モータ角速度ω0に基づいて駆動指令角速度ωCが設定される。合成目標速度ω0に目標リンク角速度ω1の成分が含まれることによりリンク24の動きに「硬さ」を持たせる一方、合成目標速度ω0に目標従動角速度ω2の成分が含まれることによりリンク24の動きに「柔らかさ」を持たせることができる。したがって、目標リンク角速度ω1と目標従動角速度ω2との合成比率Kfが調節されることにより、リンク24の動きの硬さおよび柔らかさのバランスが調節される。
(もっと読む)
1 - 20 / 51
[ Back to top ]