
Fターム[3C007KX07]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411)
Fターム[3C007KX07]の下位に属するFターム
指、吸着パッドに設けるもの (181)
Fターム[3C007KX07]に分類される特許
1 - 20 / 230
加工ロボットの軌道追従装置と方法
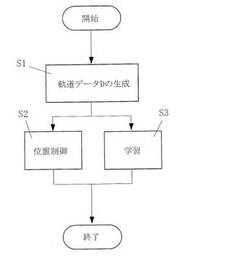
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
把持装置及びその制御方法

【課題】より簡素な構成で把持対象物の把持確認及び把持解除確認を行うこと。
【解決手段】第1及び第2の把持部材が把持対象物を把持する把持位置よりも閉側の位置である基準位置に位置しているか否かを検出する検出手段を設け、把持対象物の把持後に前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出されなかった場合に、把持対象物の把持が正常であると判定し、把持対象物の把持の解除後、前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出された場合に、把持の解除が正常であると判定する。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
ロボット及びロボットのノイズ除去方法
【課題】慣性センサーを用いたフィードバック系において、発振してしないロボットを提供する。
【解決手段】アーム101と、アームを回動させるモーター103とトルク伝達機構102とを含むアーム連結部104と、アーム101の端部のアーム連結部104に連結された基体105と、モーター103の回動角度を検出しモーター103の回動角度情報を出力する角度センサー106と、アーム101に作用する慣性力の情報を出力する慣性センサー107と、アーム101の回動動作を制御する制御部108と、角度センサー106の出力と慣性センサー107の出力とから慣性センサー107のノイズ周波数を検出するノイズ検出部109と、ノイズ検出部109の情報からフィルター111の特性を決めるフィルター定数決定部110と、フィルター定数決定部110に基づき慣性センサー107のノイズを除去するフィルター111とを備える。
(もっと読む)
把持装置
【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
チャック装置
【課題】制御部においてワークの把持が誤って認識されることを簡単な構成にて防止する。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
(もっと読む)
センサ装置及びロボット装置
【課題】検出部から出力される原検出信号から可撓体の振動に起因するノイズ成分を良好に除去し、フィルタ処理により得られる検出信号の位相の遅れを抑制する。
【解決手段】検出部101は、被測定対象の状態により変形する可撓体と、可撓体の変形量を検出し、検出結果を示す原検出信号102を出力するセンサとを有する。フィルタ部103は、フィルタ係数を用いて原検出信号102をフィルタ処理して得られる検出信号107を出力する。演算装置104は、原検出信号102に含まれる可撓体の振動数を演算により求める。変更部106は、フィルタ部103のフィルタ係数を変更して、フィルタ部103を、演算装置104により演算された振動数fを減衰させるフィルタとして機能させる。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、振動吸収体6の先端部に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
ロボット及びロボットの異常判定方法
【課題】距離センサに異常があるか否かを判定することができるロボット及びロボットの異常判定方法を提供すること。
【解決手段】本発明にかかるロボットは、距離センサ15と、距離センサ15と離れて設けられた距離検出ユニット21とを備える。ロボットはさらに、距離検出ユニット21の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第1の距離検出手段と、距離センサ15の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第2の距離検出手段と、第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とを比較する比較手段と、前記比較手段の比較の結果、前記第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とが異なる場合に、距離センサ15が異常であると判定する異常判定手段とを備える。
(もっと読む)
ロボット制御装置及びロボットの制御方法
【課題】仕切り板の配置にずれがあるパレットについても、手先との干渉を極力回避しながら作業を継続できるロボット制御装置を提供する。
【解決手段】ロボットの手先がパレットのマスの内部に挿入されると距離センサで検出される距離から周辺を囲む仕切り板の正規位置からのズレ量を検出し(S8)、パレットの外枠部分は予めフラグ「OK」を設定し(S1)、ズレ量が「ゼロ」,「マイナス」なら(S9:YES)当該仕切り板に隣接するマス側にフラグ「OK」を(S10)、ズレ量が「プラス」なら(S9:NO)当該仕切り板に隣接するマス側にフラグ「NG」を設定する(S11)。各マスのうちフラグ「NG」の設定がないものにつきフラグ「OK」の数を計算し(S2)、フラグ「OK」の数が「2」以上で最大のマスからワーク3の取出しを行ない(S6)、「2」以上のマスが存在しなければ(S4:NO)ワーク3の取出しを中止する。
(もっと読む)
バラ積みピッキング装置および方法
【課題】メッシュボックス等の容器にバラ積みされた複数のワークから、人による重量物のハンドリング作業なしにワークを1つずつピッキングすることができ、かつ容器内のワーク全体を高い位置精度で計測することができ、距離センサと容器及びワークとの干渉を無くすことができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置および方法を提供する。
【解決手段】ハンド14によりハンドに距離センサ16を取り付け(S1)、ハンドを移動して、距離センサ16によりバラ積みされたワーク全体の3次元形状データをハンド14で計測し(S2)、かつ計測した3次元形状データからハンド14で把持可能なワーク1の位置と姿勢を認識し(S4)、ハンド14によりハンドから距離センサ16を取り外し、ハンド14により把持可能なワーク1を順に把持して搬送先に搬送する(S6)。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、測定圧を一定にして計測精度をより向上できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11Aに対し、他方の電極12Aが、所要の間隔を保ちつつスライド可能に配されたセンサー部10Aと、両電極11A、12Aに関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて計測情報を出力する計測情報出力回路50と、一方の電極11Aが固定される基部20と、ワークに対して接離動可能に設けられてワークに当接されるチャック用可動爪部30Aと、チャック用可動爪部材30Aに乗った状態で付勢部材39によってワークへの当接方向へ付勢されると共にその付勢部材39の付勢力に抗して後退可能に配されたワークへの計測用接触部37を備え、且つ他方の電極12が一体の計測用可動部材36とを具備する。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
自動溶接装置における溶接トーチ位置決め方法
【課題】 枝管が傾いていても、溶接個所に対する溶接トーチの角度を一定にする。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。枝管溶接機4の溶接トーチ11の先端より突出する溶接ワイヤ15の先端を、現実の空間の或る1点に保持してロボットのマスタリングを行い、枝管溶接機4について、その点を原点Oとし且つ溶接トーチ11の円周動作の軸心位置に座標軸を備えたツール座標系16を設定する。ツール座標系16における溶接トーチ11の円周動作の軸心位置に対応する座標軸を、センシングにより検出された母管1に仮付けした枝管2の鉛直方向からの傾きに一致させる座標変換を行った後、馬蹄型ガイド5を溶接対象の枝管2に外嵌させて、溶接トーチ11の円周動作の軸心方向を、枝管2の軸心方向に一致させる。
(もっと読む)
ピッキングシステムおよびピッキング方法
【課題】ピッキング対象物体の置かれる向きに関わらず、ピッキング対象物体の識別処理時間を大幅に短縮することが可能なピッキングシステムおよびピッキング方法の提供。
【解決手段】入力画像から閉領域を抽出する閉領域抽出手段13と、入力画像から閉領域の特異点を取得する特異点取得手段14と、特異点からいくつかの等しい距離上に存在する閉領域内の画素の含有度をそれぞれ算出することで、特異点周りの等距離画素強度パラメータを導出するパラメータ導出手段15と、ピッキング対象物体について等距離画素強度パラメータを予め導出したテンプレートデータを記憶するテンプレート記憶手段16と、導出された等距離画素強度パラメータをテンプレート記憶手段16に記憶されたテンプレートデータと照合し、ピッキング対象物体を識別する識別手段17とを含む。
(もっと読む)
チャック装置
【課題】 装置全体の構造をシンプルにして低コスト化を図るようにする。
【解決手段】 チャック装置1は、先端側でワークWを把持可能なピンセット20と、ピンセット20の基端側に当接するアーム部30と、ピンセット20を弾性変形により開閉可能にするためにアーム部30をピンセット20に対して位置変位させる直動型ステッピングモータ40と、ワーク把持直前にピンセット20の閉速度を減速する、ピンセット20の閉状態の閉距離を調節する、又はワーク開放時のピンセット20の開速度を加速する等の機能を有したコントローラ50とを具備している。
(もっと読む)
開閉両方向に力を出せる把持装置
【課題】高速で駆動しかつ大きな把持力を得ることができ、開閉両方向に力を出せる把持装置を提供する。
【解決手段】第1の回転アクチュエータと、第1の回転アクチュエータで駆動される第1の動力伝達機構と、第1の動力伝達機構で駆動される第1の指と、第1の回転アクチュエータを固定載置する第1の台車と、第1の台車上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置した、第2の台車と、第2の台車に固定載置した第2の回転アクチュエータと、第2の回転アクチュエータの回転速度を減速する減速機と、減速機で駆動される第2の動力伝達機構と、第2の動力伝達機構の先端部に配置された押し板と、第1の指と共に物体を把持する、第2の指又は第1の固定壁と、を備え、第1の台車を、台座上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置し、台座には、第1及び第2の停止部と、第1及び第2のばねと、を備える。
(もっと読む)
ロボットの教示手順校正装置および方法
【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
1 - 20 / 230
[ Back to top ]